




1 шт. оптический поток Сенсор модуль точечной зависания Управление полетного положения держит стабильно, зарядная Модульная плата VS Cheerson CX-OF Поддержка APM 
1 139,05₽
В наличии!
Последнее обновление: 05.03.2022

Модуль управления оптическим датчиком потока, положение полета, уде...
1 127,65₽
1 шт. модуль оптического датчика потока, управление точечной зависимостью, положение полета, стабильная плата модуля VS Cheerson CX-OF Support APM


Мини-оптический датчик потока, контроль точки парения, положение полета, Устойчивый модуль оптического потока, плата для FPV Quadcopter Drone DIY
Формат данных также совместим с прекращенным продуктом Cheerson CX-OF, уже поддерживаемым ArduCopter.
Примечание:
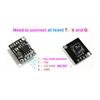
После получения модуля, вам нужно подключить модуль к вашему собственному управлению полетом с помощью провода, а затем настроить программу с вашей головой вниз.
Возможно, вам понадобится Электрический паяльник.
Невозможно играть с этим модулем без определенной основы навыков.
Пожалуйста, подумайте дважды перед оплатой заказа!
Характеристика:
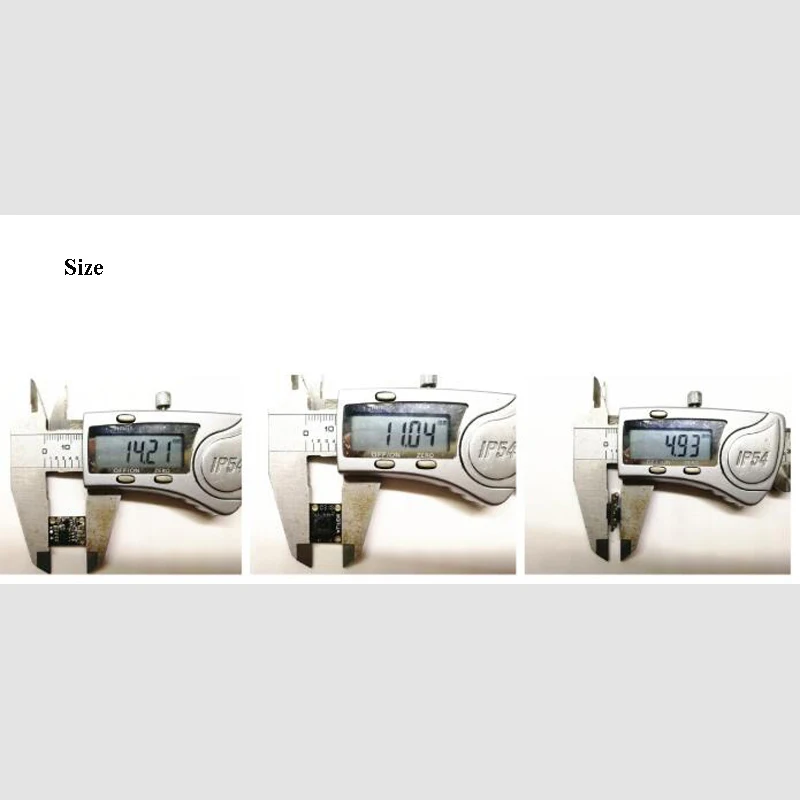
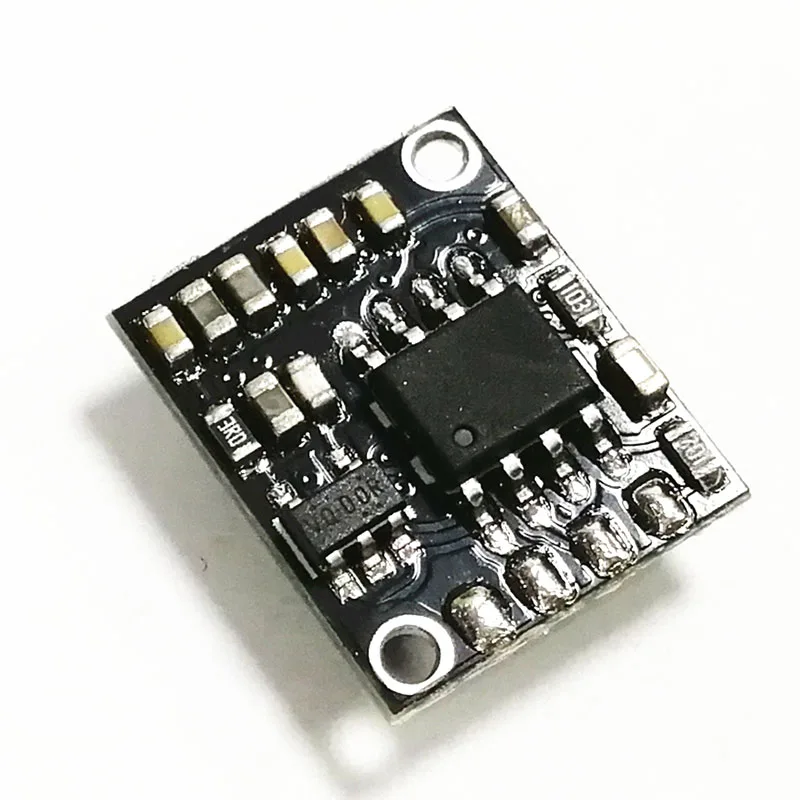
1. Размер: 14x11x5 мм очень маленькие, только 0,6 г, но при этом производительность очень хорошая. Крытый обычной лампы также может использоваться на керамическая плитка для пола
2. Никаких схем! Нет исходного кода! Не открывайте источник!
Интерфейс модуля и протокол:
Этот модуль отправляет информацию о данных на компьютер через последовательный порт.
Характеристики данных:
А. 8-bit data бит, без проверки бит, 1 бит стоп-бит, скорость передачи данных набор для 19200bps.
B. Частота передачи данных: около 66fps частота кадров в секунду для передачи данных на хост.
C. Другие: если смещение двух последовательных кадров слишком маленькое, 0 будет выходным, а затем данные будут выводиться, когда будет достаточно смещения.
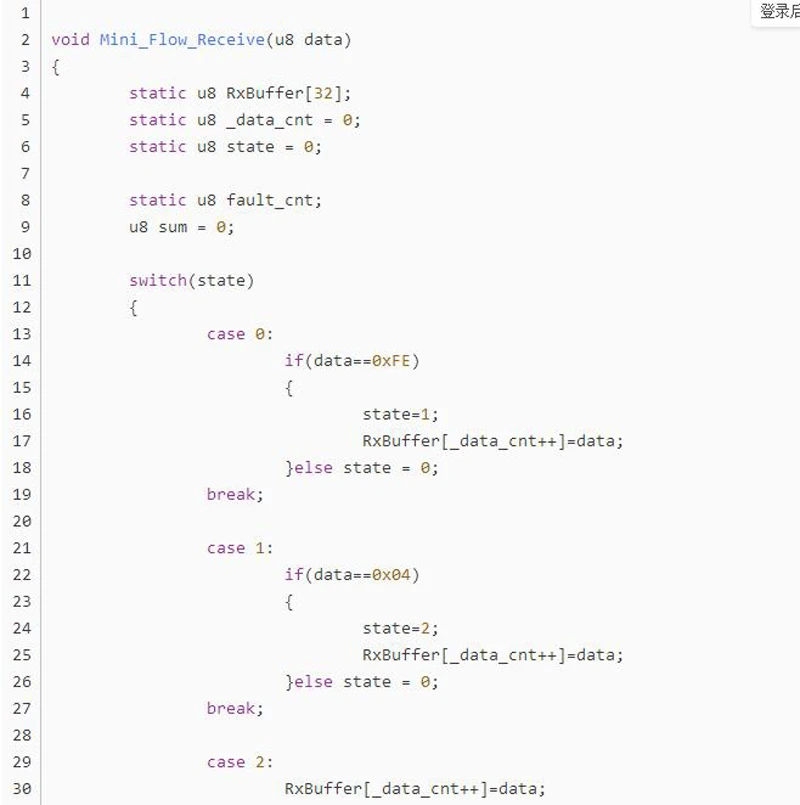
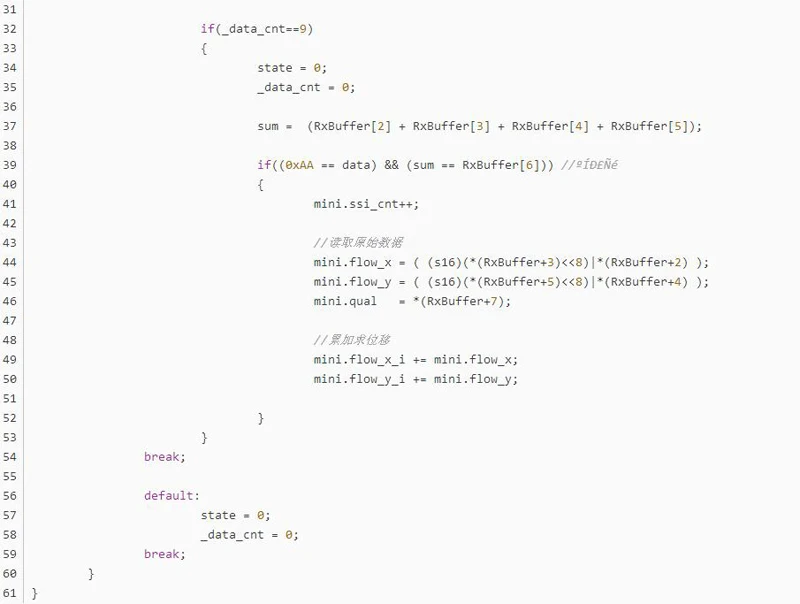
Описание:
А. Заголовок-это фиксированные два байта: OxFE (заголовок), 0x04 (количество байтов);
B. DATAO, DATA1-это низкие и высокие восемь бит потока-x, а именно fow-x = (int16)(DATA1 <8) (DATA0) :
C. DATA2, DATA3-это низкие и высокие восемь бит потока-y, то есть, flow-y = (int(DATA3 <8)(DATA2);
D. Последний, но один байт-это контрольный байт, который является совокупным значением четырех байтов data0-data3, то есть SUM = DATAO + DATA1 + DATA2 + DATA3; создание сетей для идентификации и перевода.
Е. Предпоследний байт-это качество окружающей среды Земли;
F. Последний байт-это Идентификатор Конца пакета, фиксированный как OXAA;
Тестирование:
Сначала положите его на управление полетом. Вот как я его подключил.
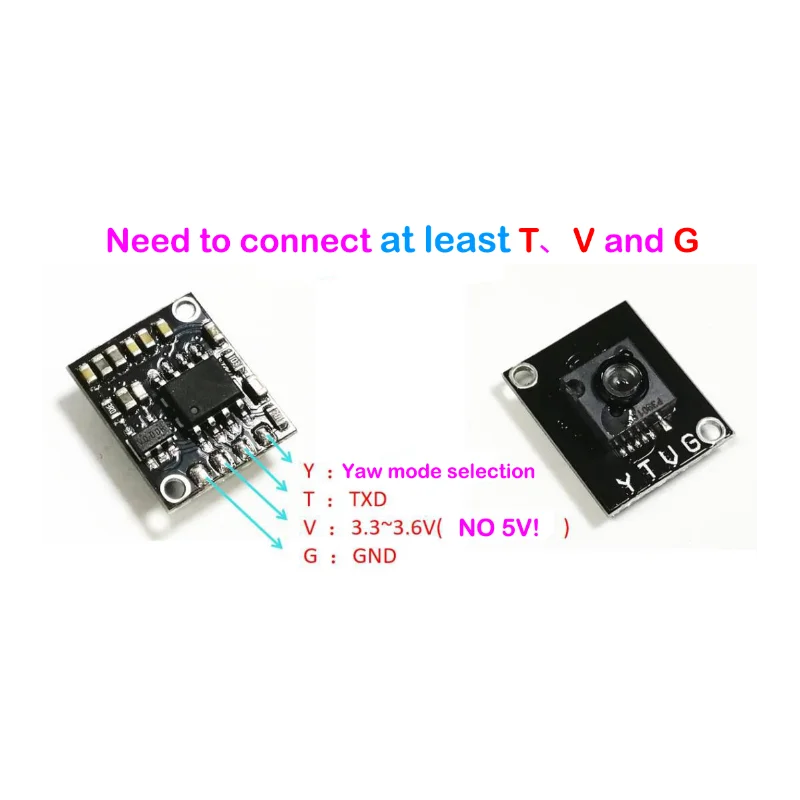
Я использовал Электрический паяльник для сварки трех проводов dupont к модулю, а затем непосредственно подключил их к последовательному порту управления полетом. Примечание: входное напряжение 3,3-3,6 v. Напряжение слишком низкое, чтобы модуль работал должным образом и может повредить модуль, если он слишком высок.
В первую очередь
Получение и анализ данных, этот момент не детализирован, в соответствии с протоколом связи для записи кода, относительно простой код непосредственно на нем.
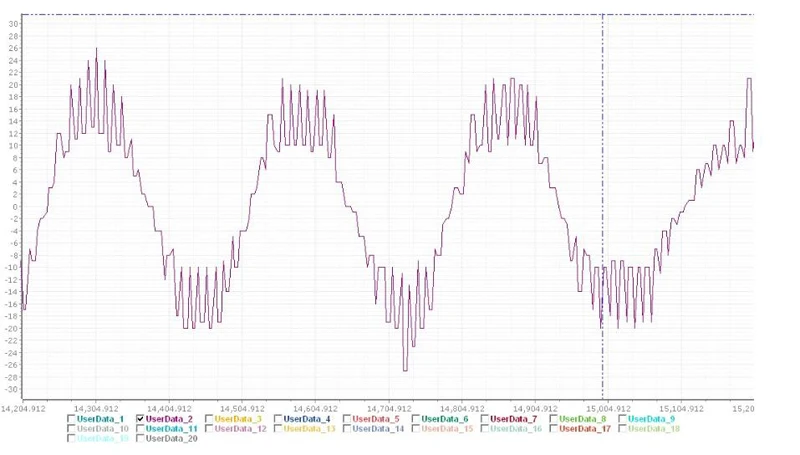
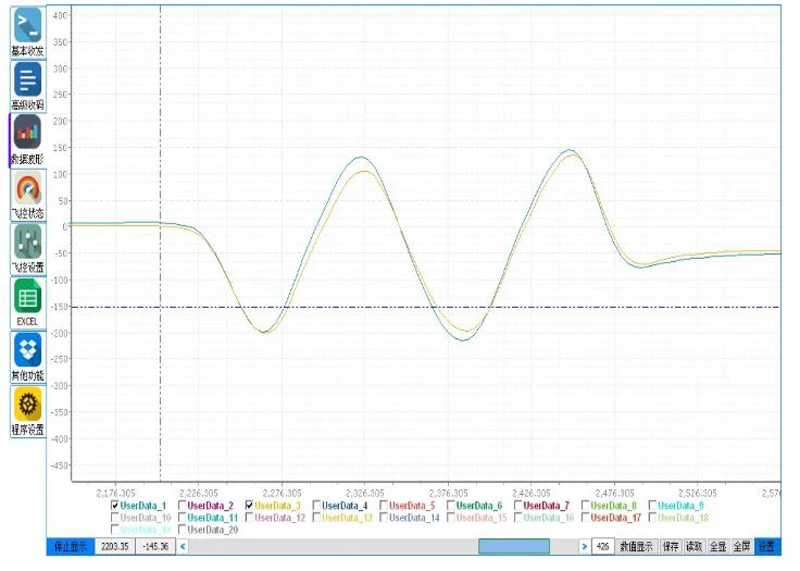
Давайте взглянем на исходную кривую данных оптического потока. Условия тестирования: модуль находится на расстоянии около 20 см от рабочего стола, объектив обращен к рабочему столу, а диапазон вывода данных составляет около +-30:
Второй
Обработка данных о оптическом потоке (так как вывод данных этим оптическим потоком не прошел инерционного синтеза, его необходимо обрабатывать до его использования).
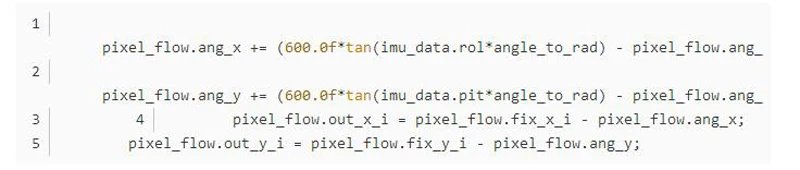
ВПервый шаг, Простой низкопроходный фильтр применяется к интегральному смещению.
Шаг 2, Интегральное Смещение (# define angle_to_rad 0.0174f/arc) компенсируется углом отношения.
Примечание:600.0f является важным параметром! Нужно медленно настроить, настроиться на то, как просто рассчитать право?
Когда самолет трясется на месте, кривые pixel_flow.fix_x_i и pixel_flow.ang_x могут быть почти одинаковой амплитудой изменения, два смещения друг друга для достижения эффекта компенсации. Или поставить его таким образом: кривые pixel_flow.fix_y_i и pixel_flow.ang_y меняются почти на такое же количество (обратите внимание, в частности, что данные о интегральном перемещении будут медленно увеличиваться или уменьшаться, когда самолет движется на месте, это явление интегрального дрейфа и является нормальным).
Кривая pixel_flow.fix_x_i и pixel_flow.ang_x при встряхивании самолета на месте:
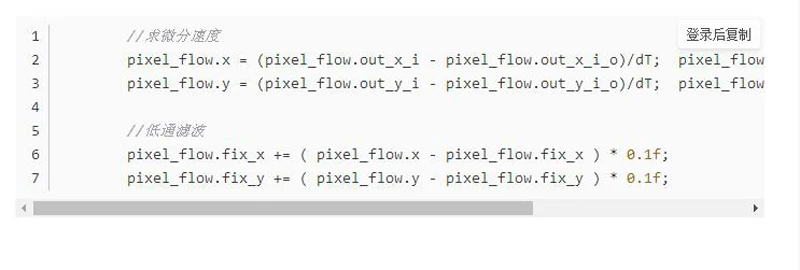
Шаг 3, Интегральное смещение дифференцируется для получения скорости 1.
Теперь некоторые люди могут путать это, почему мы дифференцируем скорость вместо того, чтобы просто использовать выход оптического потока в качестве скорости? Причина в том, что выходные данные этого оптического модуля потока не Строго говорят о скорости, но относительное смещение двух последовательных кадров в пикселях.
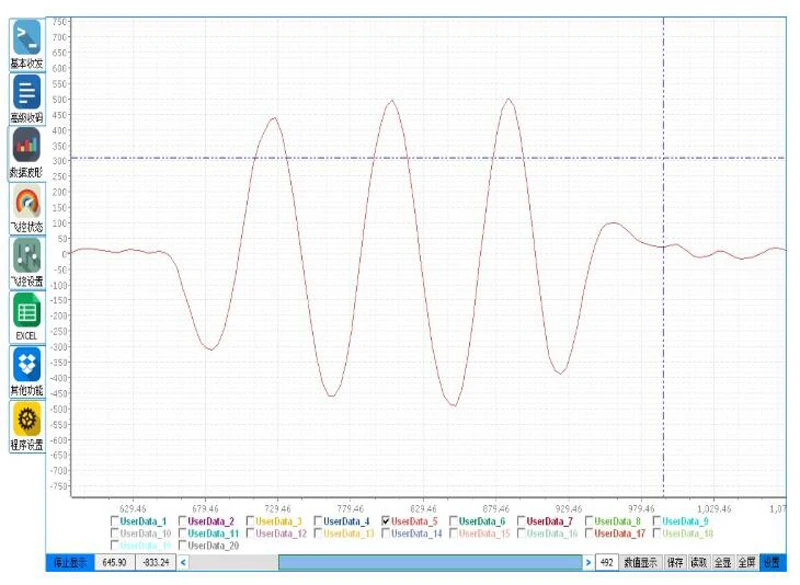
Кривая скорости самолета движется вперед и назад в горизонтальной плоскости:
Цель компенсирования интегрального смещения с углом наклона заключается в том, чтобы сохранить интегральное смещение как можно более постоянным, когда самолет трясется на месте. Почему мы хотим сохранить интегральное смещение как можно более постоянным? Довольно просто, потому что самолет трясется на месте, смещение не меняется.
Когда самолет трясется на месте, Интегральная кривая смещения после компенсации угла отношения показана следующим образом: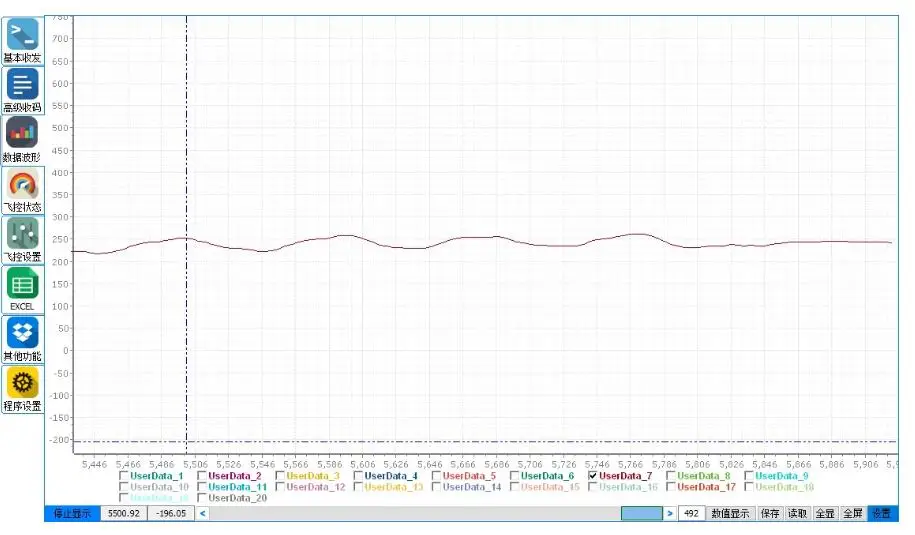
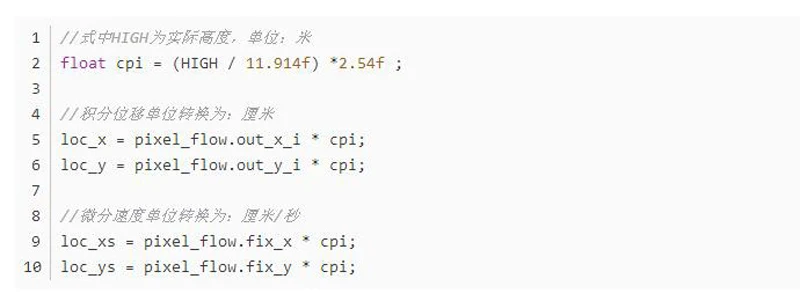
Шаг 4. Конвертируйте единицы данных в сантиметры.
На данный момент обработка оптических данных потока в основном завершена. С двумя параметрами интегрального смещения и дифференциальной скорости, может осуществляться Каскадное PID управление контура положения и контура скорости в горизонтальной плоскости.
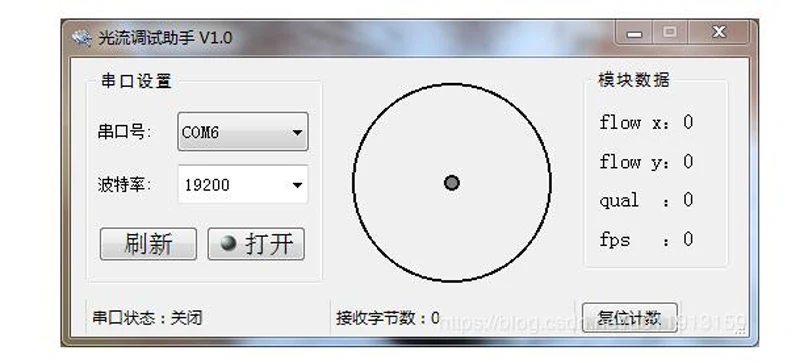
Наконец-то, Я предоставлю вам помощник по отладке оптического потока. После подключения мини-модуля оптического потока к компьютеру через модуль последовательного порта, вы можете открыть верхний компьютер для просмотра данных модуля оптического потока и иметь функцию динамического дисплея, что очень удобно! Протокол связи соответствует тому, что описано в этой статье.
Вопросы и ответы покупателя:
В1: работает ли он в pixhawk 2.4.8?
A1: Да, работает в pixhawk 2.4.8.
В2: обслуживает Дрон SG 106 версии 720p?
A2: Нет, он не обслуживает Дрон SG 106 версии 720p.
В3: Работает на APM 2,8?
A3: Нет, он должен использоваться в прошивке Ardupilot или PX4 на Pixhawk.
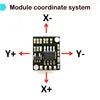
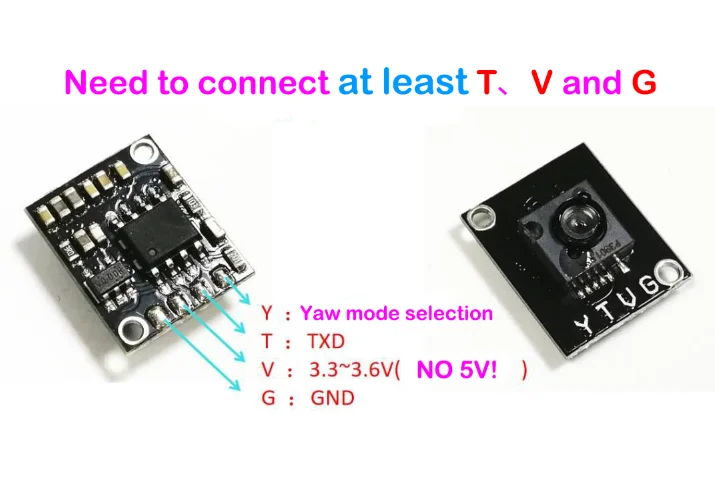
Специальное примечание о Y pin:
①Этот штырь является портом выбора режима yaw. Он активен на низком уровне и по умолчанию работает в режиме high (нормальный режим) при запуске.
②Когда Дрон находится в режиме yaw motion, рекомендуется потянуть Y pin, чтобы модуль мог войти в режим yaw.
③ Когда датчик не находится в движении, потяните Y pin high, чтобы поместить модуль в обычный режим.
④Если модуль не включается в режим yaw во время движения yaw, это может вызвать дрожание и дрейф. Он может быть улучшен после включения режима yaw.
⑤Если модуль находится в режиме yaw, когда дрон не находится в режиме yaw, линейность данных модуля может быть повреждена.
⑥ Если вы не понимаете вышеуказанное содержание, пожалуйста, игнорируйте пин-код Y, Просто подумайте об этом как о несуществующем.
Отзывы покупателей
Покупатель
Страна: DE Доставка: Standard Shipping 04.05.2022
Этот датчик очень круто. В отличие от других низкая стоимость оптические датчики расхода, которые нуждаются в очень высокой интенсивности света в окружающую среду в целях работать должным образом, этот датчик не нужно! Классные!