




Головной убор двигателя для Raspberry Pi, I2C интерфейс. 
Development Board Store - Надежность 97.5%
Более 1496 подписчиков, дата открытия магазина 18.02.2013
- Положительные оценки: 98% (85)
- Соответствие описанию: 98%
- Отвечает на сообщения: 98%
- Скорость отправки: 96%
Последнее обновление: 13.10.2024

Описание
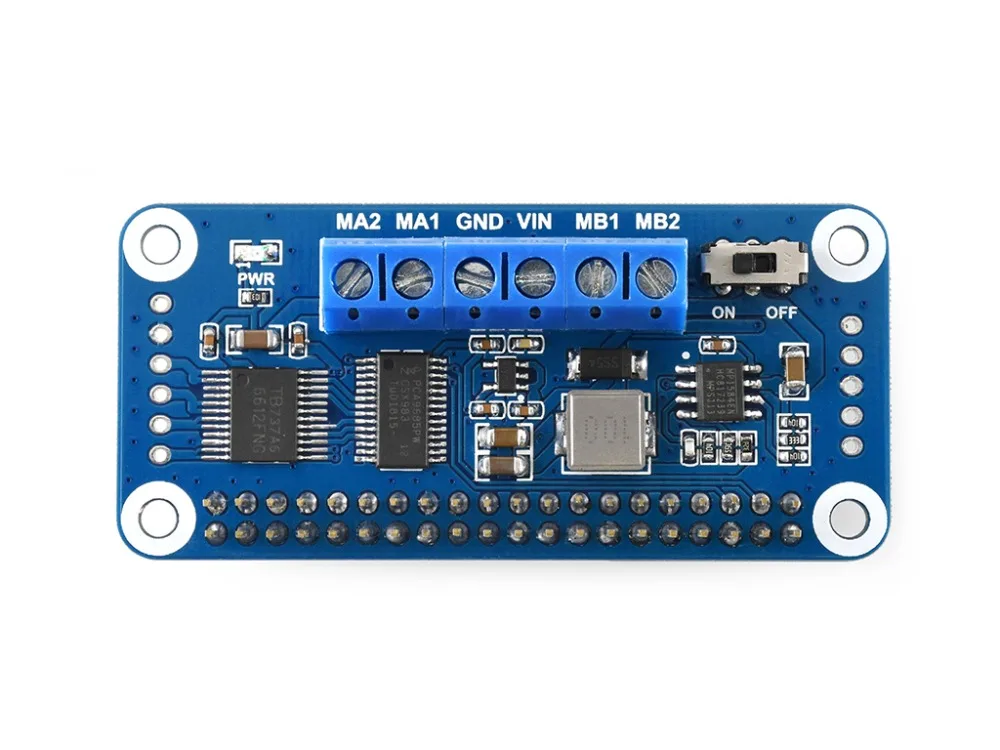
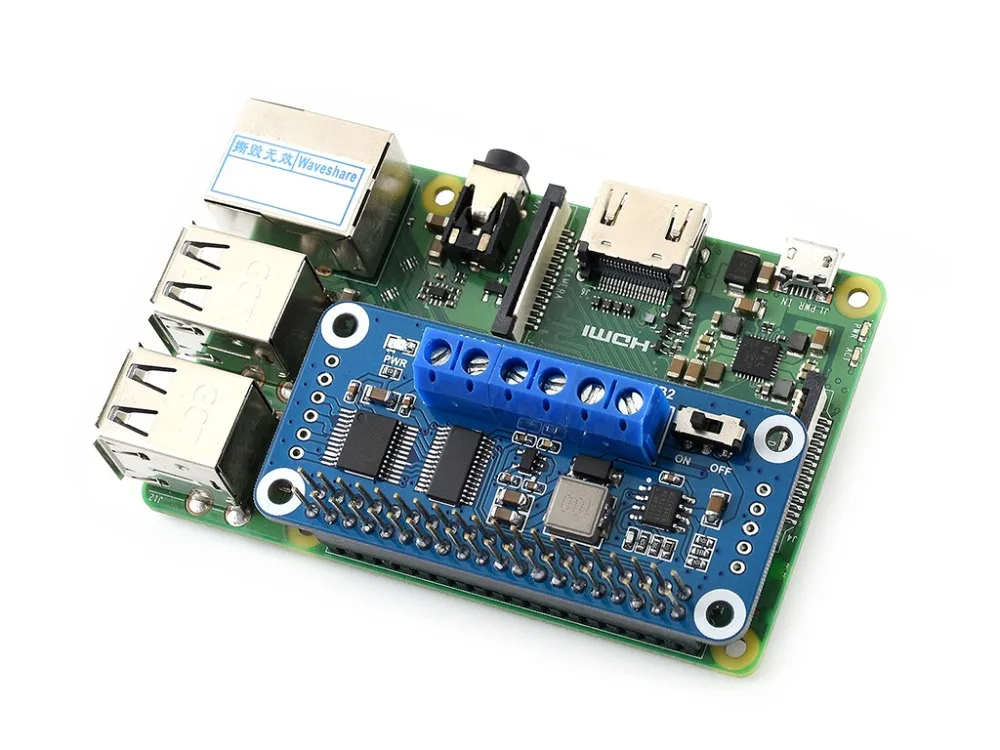
Головной убор двигателя предназначен для Raspberry Pi, управляется через интерфейс I2C, будет одновременно управлять двумя двигателями постоянного тока. Это идеальный выбор для вас, чтобы сделать своими руками мобильных роботов.
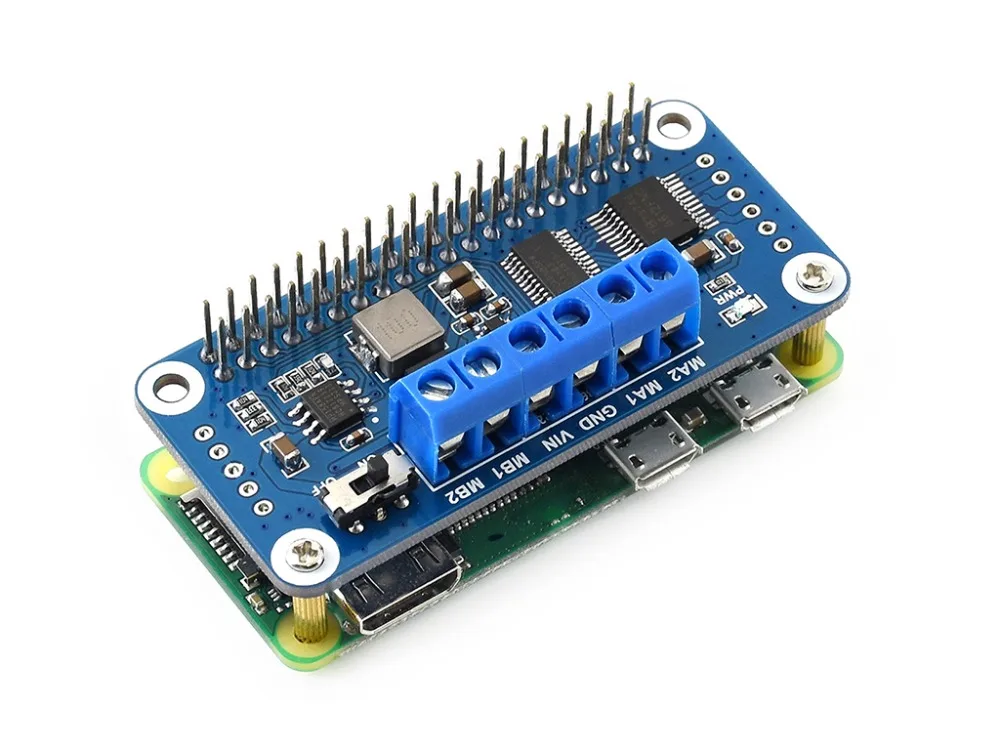
ОсобенностиRaspberry Pi подключение, совместимо с Raspberry Pi Zero/Zero W/Zero WH/2B/3B/3B +
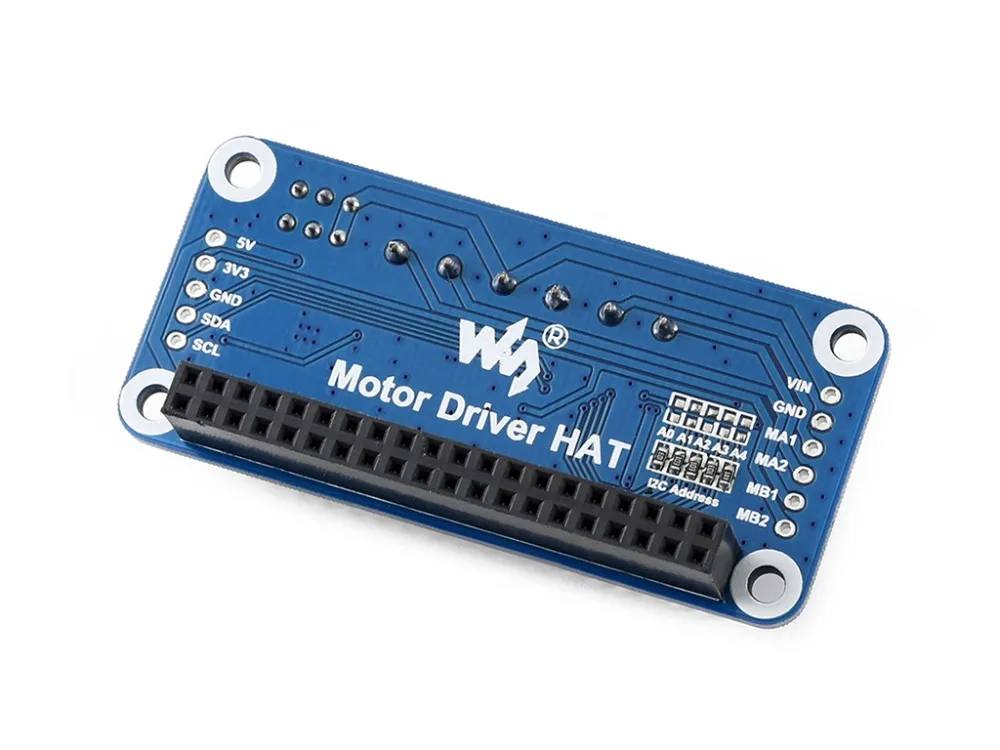
I2C управляется, установив 5 адресных перемычек, он штабелируется до 32 этих модулей
Бортовой PCA9685 чип, обеспечивает 12-разрядный оборудования ШИМ Регулировка мотора скорости
Бортовой TB6612FNG двойной h-мост мотор драйвер, высокая эффективность, низкий нагрев
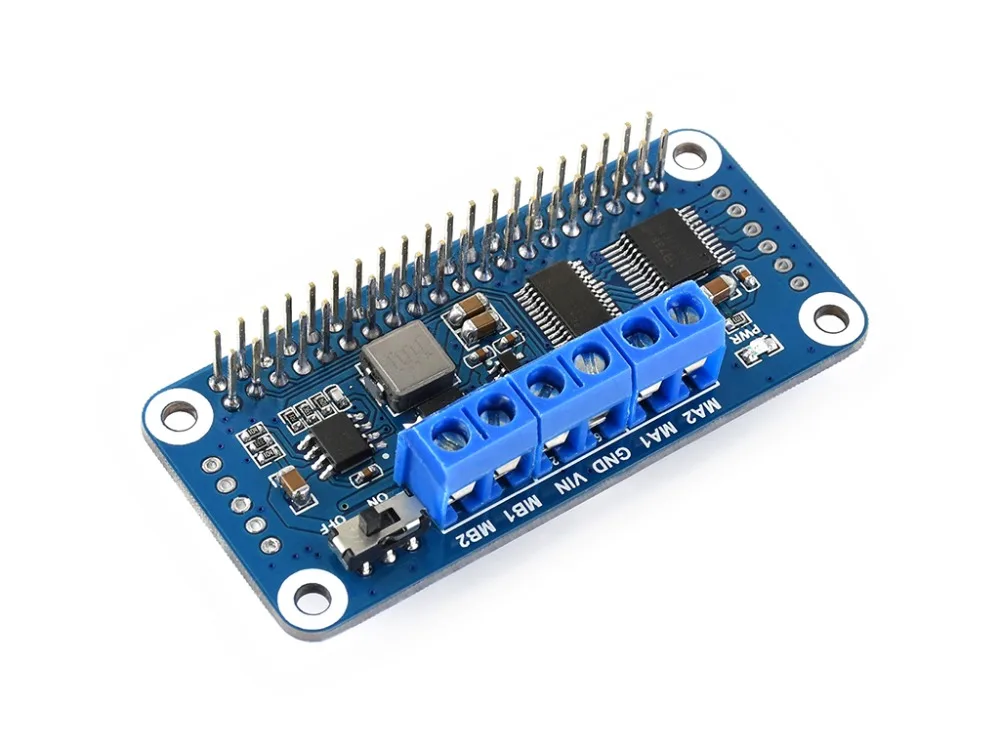
Интегрирует 5 в регулятор, до 3 А выходной ток, может быть приведен в действие от батареи через vin-терминал
Сдержанные контакты управления I2C, позволяет работать с другими контрольными платами
Поставляется с ресурсами разработки и руководством (примеры в BCM2835, wiringPi и python)
Технические характеристикиИсточник питания: 6 В ~ 12 В (vin-терминал)
Logic напряжение: 3,3 V
Драйвер PWM: PCA9685
Интерфейс управления: I2C
Драйвер двигателя: TB6612FNG
Размер: 65 мм x 30 мм
Размер монтажного отверстия: 3,0 мм
Размеры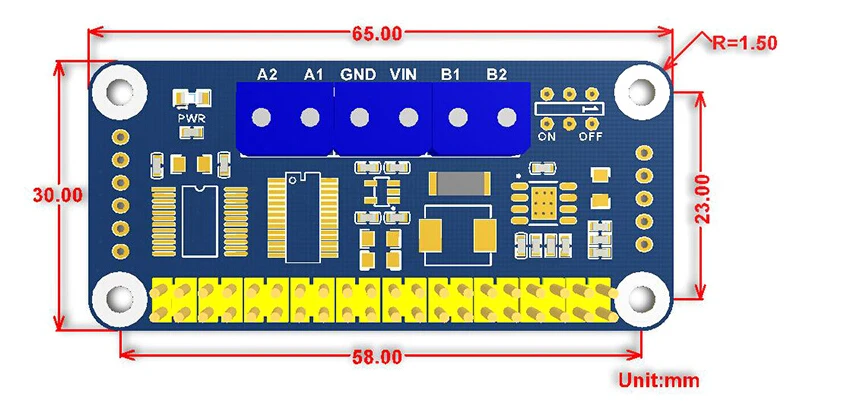
Вики:Www.waveshare.com/wiki/Motor_Driver_HAT
Посылка
Вес:0,018 кг
Примечание: Raspberry Pi на фотографиях не входит в комплект.
Головной убор мотора x1
Набор винтов RPi (2 шт.) x1
