









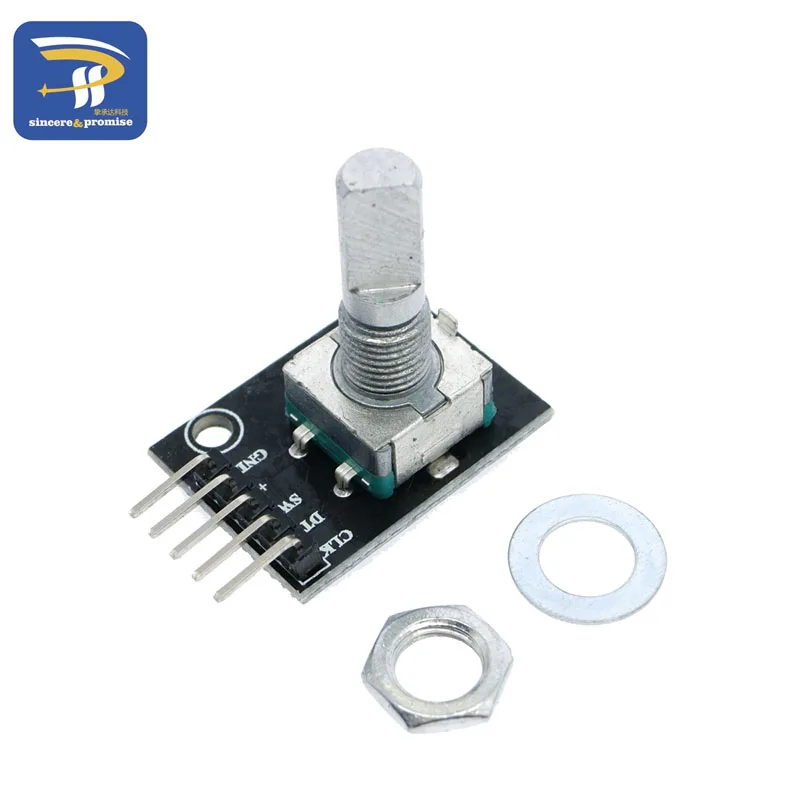
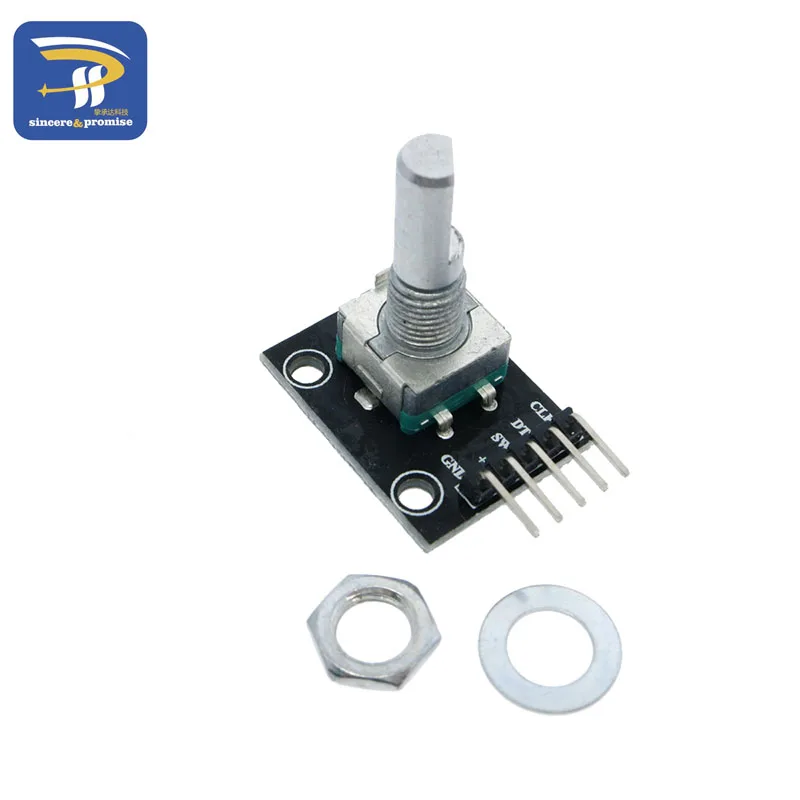
Модуль поворотного энкодера KY-040 360 градусов, макетная плата переключателя датчика, для Arduino с штырьками и полувалом 
Sincere Company Store - Надежность 97.5%
Более 17176 подписчиков, дата открытия магазина 13.03.2012
- Положительные оценки: 98% (12454)
- Соответствие описанию: 98%
- Отвечает на сообщения: 98%
- Скорость отправки: 96%
Последнее обновление: 15.09.2024

Рабочее напряжение: 5 В
Количество импульсов: 20
Поворотный энкодер может подсчитывать число импульсов, выходящих в прямом и обратном направлениях по вращению, а счет вращения не похож на потенциометр. Количество вращений не ограничено. С помощью кнопки на поворотном энкодере можно сбросить в Начальное состояние, то есть считая от 0.
Принцип работы:
Инкрементный энкодер-это поворотный датчик, который преобразует поворотное смещение в серию цифровых импульсных сигналов. Эти импульсы используются для контроля углового смещения. Преобразование углового смещения в энкодере Eltra использует принцип фотоэлектрического сканирования. Система считывания основана на вращении радиального индексирующего диска (кодовый диск), состоящего из переменных окон светопропускания и опудренных окон, и облучается вертикально инфракрасным источником светильник, И изображение кода проецируется на поверхность приемника. Приемник покрыт слоем дифракционной решетки, которая имеет ту же ширину окна, что и энкодер. Работа приемника заключается в том, чтобы почувствовать изменения, которые возникают при вращении диска, а затем преобразовать изменения светильник в соответствующие электрические изменения. А затем Низкий сигнал на более высокий уровень и не создает помех квадратному импульсу, который должен использоваться для работы с электронными цепями. Система чтения обычно использует дифференциальный режим, который сравнивает два сигнала с одинаковой формой волны, но с фазовой разницей 180 ° для улучшения качества и стабильности выходного сигнала. Показания формируются на основе разницы между двумя сигналами, тем самым устраняя помехи.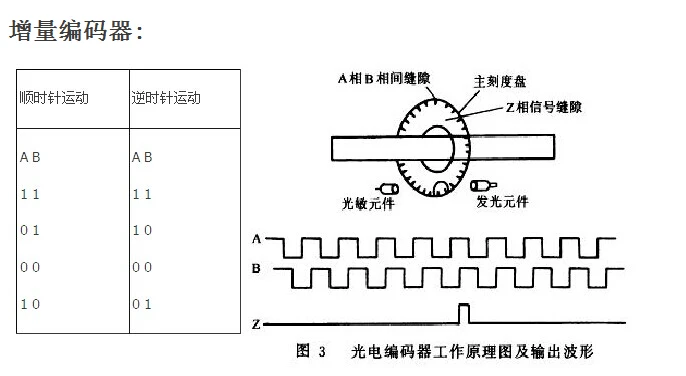
Инкрементный энкодер:
Инкрементные кодеры дают двухфазные квадратные волны с разницей фаз 90 °, обычно называемые a-каналом и B-каналом. Один из каналов дает информацию о скорости, в то же время, через два канала сигналов для сравнения, получить информацию о направлении вращения. Также есть специальный сигнал под названием Z или zero channel, который дает Абсолютный ноль энкодера, который представляет собой квадратную волну, совпадающую с центральной линией канала квадратной волны.
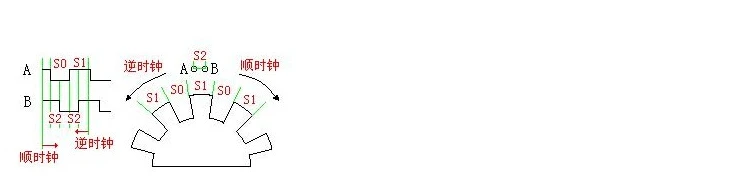
Точность инкрементного кодировщика зависит от механических и электрических факторов, таких как ошибка индексации решетки, эксцентричность оптического диска, эксцентричность несущего устройства, ошибка, возникающая при использовании электронного считывающего устройства, и неточность оптического сечения. Единица измерения, определяющая точность энкодера,-это электрическая степень, а точность энкодера определяет деление импульсов энкодера. Ниже показано вращение механического вала на 360 ° с электрическим градусом, а вращение вала должно быть полным циклом. Чтобы узнать, насколько механический угол эквивалентен электрическому 360 градусов, вы можете использовать следующую формулу для расчета: Electric 360 = machine 360 ° / n ° pulse / turn

Рисунок: A, B коммутационный сигнал
Ошибка индексации энкодера выражается как Максимальное смещение двух последовательных всплесков электрических углов. Ошибка присутствует в любом энкодере, что вызвано вышеуказанными факторами. Максимальная погрешность энкодера Eltra составляет ± 25 Электрический угол (при любых заявленных условиях), соответствующий номинальному отклонению ± 7%, И максимальное отклонение двух каналов с разницей фаз 90 ° (электрический) ± 35 Электрический градус эквивалентен примерно ± 10% номинального значения.
Инкрементный кодер сигнала UVW
Помимо обычных кодеров, есть некоторые добавочные кодеры, которые интегрированы с другими электрическими выходными сигналами. Инкрементный энкодер, интегрированный с сигналом UVW, является примером, который обычно используется для обратной связи с серводвигателями переменного тока. Эти магнитные полюсные сигналы обычно появляются в серводвигателе переменного тока, UVW сигнал обычно создается симуляцией функции оригинального магнита. В кодерах Eltra эти сигналы UVW генерируются оптически и появляются тремя квадратными волнами, которые смещены друг от друга на 120 °. Для того чтобы облегчить запуск двигателя, Управляйте стартером для мотора нужны эти правильные сигналы. Эти полюсные импульсы UVW можно повторять много раз при вращении механической оси, поскольку они напрямую зависят от количества подключенных моторных полюсов и используются для сигналов UVW 4, 6 или более полярных двигателей.





















Отзывы покупателей
Страна: BY Доставка: Cainiao Super Economy 17.08.2021
Всё в норме . Вроде бы работает - а какое качество изготовления - жизнь покажет - но думаю что не долго - как и всё что из Китая купленное .
Страна: RU Доставка: Cainiao Super Economy 26.10.2021
всё хорошо.
A***v
Страна: RU Доставка: Cainiao Super Economy 06.01.2022
Отличные энкодеры. Спасибо!