NEO-M8T ГНСС ГРМ шляпа для Raspberry Pi, мульти-созвездие приемник Поддержка, один-спутниковая Функция синхронизации
NEO-M8T GNSS синхронизации шляпа
GNSS модуль на основе NEO-M8T для Raspberry Pi, Функция синхронизации с помощью одного спутника
Точное и Быстрое позиционирование с незначительной дрейфующей, низкое энергопотребление, выдающаяся способность для защиты от Spoofing & Anti-Jamming
ЭтоRaspberry Pi шапка GNSSИсходя изNEO-M8TС поддержкой мультисозвездия, а также точной функцией синхронизации с помощью одного спутника. Поддержка одновременного приема до 3 ГНСС (GPS, Beidou, Galileo, GLONASS) и дополнительных систем, таких как SBAS, QZSS, IMES и D-GPS. Он имеет точное и Быстрое позиционирование с незначительной дрейфующей, низкое энергопотребление, выдающиеся возможности для защиты от spoofing & anti-jamming и так далее.
Просто закрепив его на Pi, это довольно просто, чтобы включить возможность GNSS для вашего Raspberry Pi.
Особенности, который обеспечивает широкий угол обзора
Точная Функция синхронизации, высокая доступность даже с одним спутником
Высокодинамические радиоприемники с аналоговым и цифровым подавлением помех, поддержка приложений в беспроводном коммуникационном оборудовании
Поддержка мультисозвездия, одновременный прием до 3 типов спутниковых систем GNSS от GPS, Beidou, Galileo и GLONASS, и по-прежнему сохраняет низкое энергопотребление
Поддержка дополнительных систем, включая SBAS, QZSS, IMES, D-GPS, повышение эффективности позиционирования местоположения службы
A-GNSS (Вспомогательный ГНСС) поддержка, уменьшая первое время позиционирования при включении, улучшая чувствительность к приобретению
Характеристики-167dBm навигационная чувствительность и выдающаяся способность для защиты от spoofing & anti-jamming, поддержка геоограждения
Поддерживает U-Center, простой способ настройки модуля
Стандартный Raspberry Pi 40PIN GPIO удлинитель, поддержка Raspberry Pi серии плат, Jetson Nano
Разбивает интерфейс UART и I2C модуля для подключения к хост-платам, таким как Arduino/STM32
Диапазон Baudrate: 4800 ~ 921600bps (9600bps по умолчанию)
Поддерживает DDC (I2C совместимый) Интерфейс: до 400 кГц (макс.)
Встроенный держатель батареи, поддерживает перезаряжаемый элемент ML1220, для сохранения информации о эфемерах и горячих запусков
4x светодиодов для указания рабочего состояния модуля
Поставляется с ресурсами разработки и руководством (примеры для Raspberry Pi/Jetson Nano/Arduino/STM32)
Технические характеристики
GNSS Технические характеристики
NEO-M8T
GPS и ГЛОНАСС
GPS
ГЛОНАСС
Бэйдоу
Galileo
Диапазон частот
72-канальный u-blox M8 двигателя
GPS L1C/A, SBAS L1C/A, QZSS L1C/A, QZSS L1 SAIF, GLONASS L1OF, BeiDou B1, Galileo E1B/C
Горизонтальная точность координатного перемещения
Автономный
2,5 м КЭП
2,5 м КЭП
4,0 м КЭП
3,0 м КЭП
-
SBAS
2,0 м КЭП
2,0 м КЭП
-
-
-
Макс навигации частота обновления
4 Гц
10 Гц
10 Гц
10 Гц
10 Гц
Время на первое исправление
Морозы заводится
25s
29s
30С Отсчетом
34s
45С
Горячего запуска
1s
1s
1s
1s
1s
При помощи начинается
2s
2s
2s
3s
Фотоаппаратов моментальной печати 7s
Чувствительность
Отслеживание при помощи
-167 дБм
-166 дБм
-166 дБм
-159 дБм
-159 дБм
При помощи приобретение
-157 дБм
-157 дБм
-151 дБм
-146 дБм
-142 дБм
Повторного приобретения
-160 дБм
-160 дБм
-156 дБм
-156 дБм
-153 дБм
Морозы заводится
-148 дБм
-148 дБм
-145 дБм
-143 дБм
-138 дБм
Горячего запуска
-160 дБм
-160 дБм
-156 дБм
-155 дБм
-151 дБм
Скорости точности
0,05 м/с
0,05 м/с
0,1 м/с
0,1 м/с
0,1 м/с
Заголовок Точность
0,3 градусов
0,3 градусов
0,4 градусов
0,5 градусов
0,5 градусов
PPS точность
Ясного неба
≤ 20ns
В помещении
≤ 500ns
Дрожания
± 11ns
PPS частоты
0,25 Гц… 10 МГц (настраивается)
Рабочие пределы
Ускорение (макс.): 4g
Высота (макс): 50000 м
Скорость (макс): 500 м/с
Другие характеристики
Интерфейс связи
USB, UART (по умолчанию 4800 ~ 921600bps, 9600bps), I2C (макс. 400 кГц)
Частота обновления
1 Гц (по умолчанию), 10 Гц (макс.)
Протокол
NMEA 0183 версия 4,0 (V2.3 или V4.1 выбор), UBX, RTCM 2,3
Блок питания
5V
Общее текущее
<45mA @ 5 вольт постоянного тока (по-прежнему режим)
Модуль Текущий
32mA @ 3В (по-прежнему режим)
Рабочая температура
-40 ℃ ~ 85 ℃
Размеры
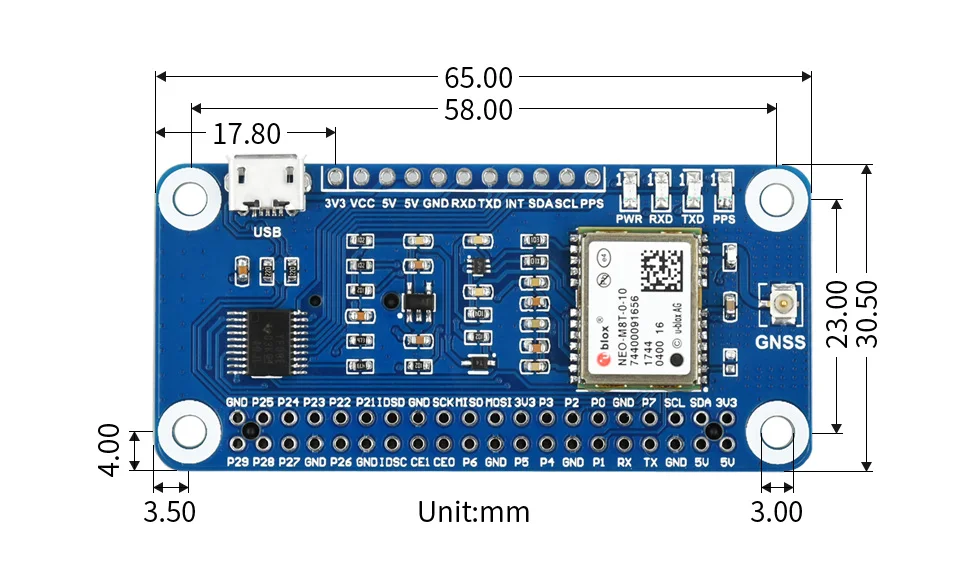
65 мм × 30,5 мм
Стандартный Raspberry Pi 40PIN GPIO
Совместим с Raspberry Pi Series Boards, Jetson Nano

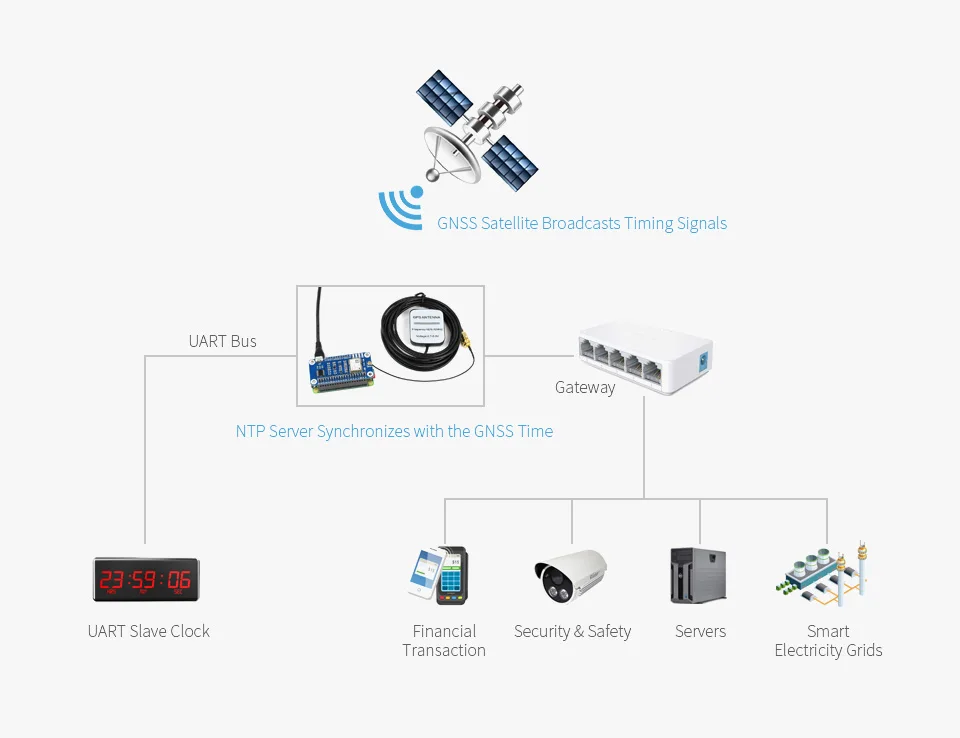
Синхронизация и синхронизация с помощью одного спутника
Высокая целостность, точная Функция синхронизации, высокая доступность даже с одним спутником
Экономичный, высокоточный, простой в применении
Поддержка мультисозвездия приемника
Одновременный прием до 3 типов спутниковых систем GNSS и по-прежнему сохраняет низкое энергопотребление
Поддерживает GPS, Beidou, Galileo и GLONASS

Увеличить системы поддержки
Система расширения нацелена на повышение точности, целостности, надежности и доступности позиционирования и навигации
Поддерживает дополнительные системы, включая SBAS, QZSS, IMES, D-GPS

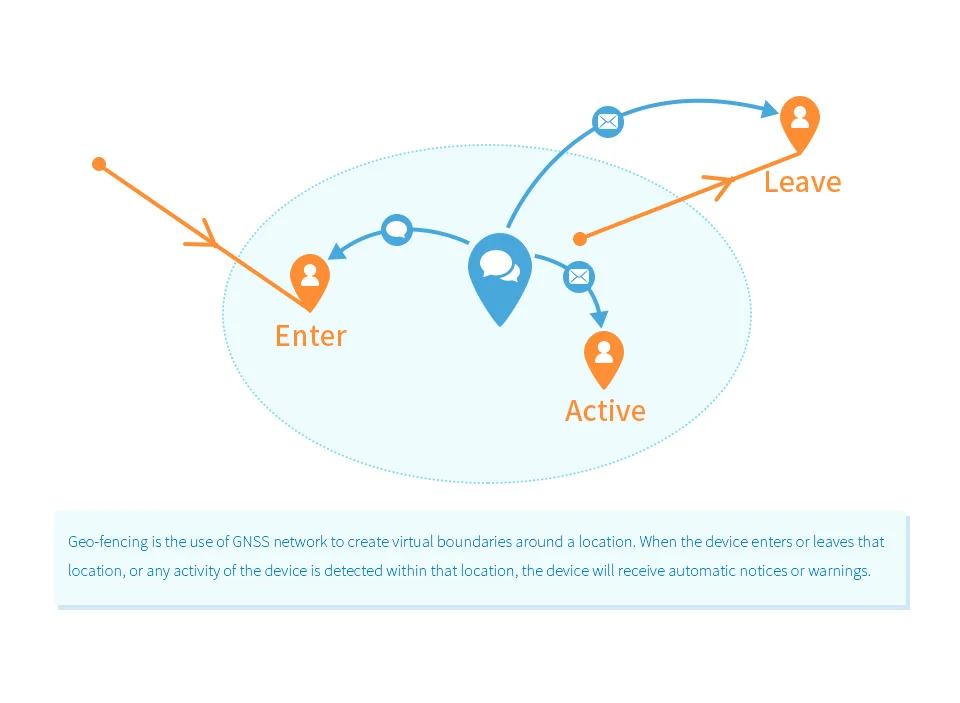
Геолокация поддержка
Характеристики-167dBm навигационная чувствительность, выдающаяся способность для защиты от помех и помех
Поддержка программного обеспечения U-Center
Простой способ настроить модуль

Приложений
Идеально подходит для управления флотом, отслеживания активов, финансовых транзакций, интеллектуальных электрических сетей, систем безопасности, промышленных PDA, ГИС-приложений и т. Д.

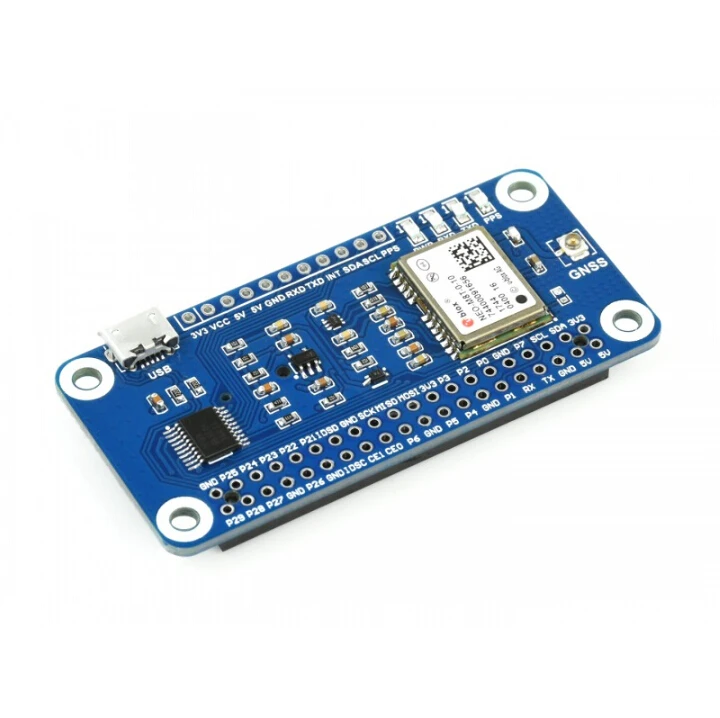
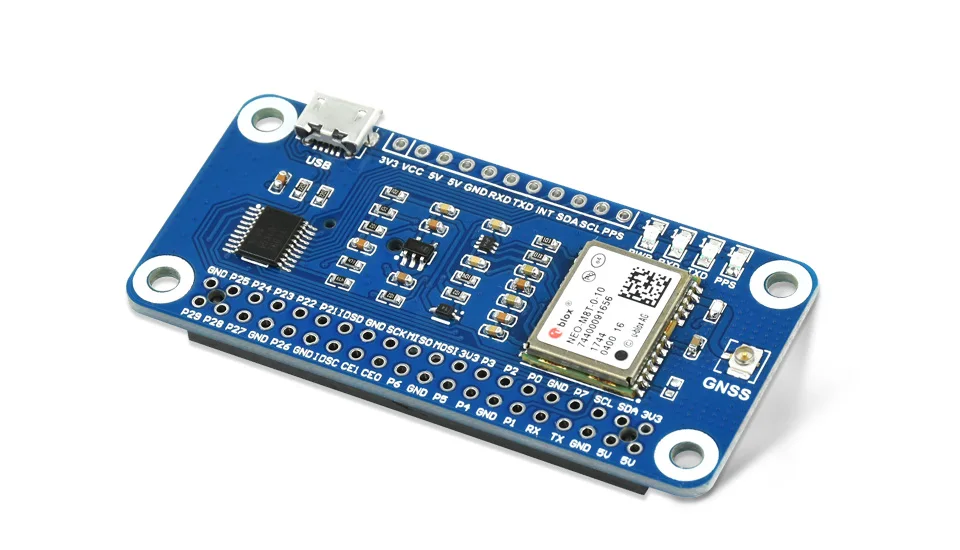
What's On Board
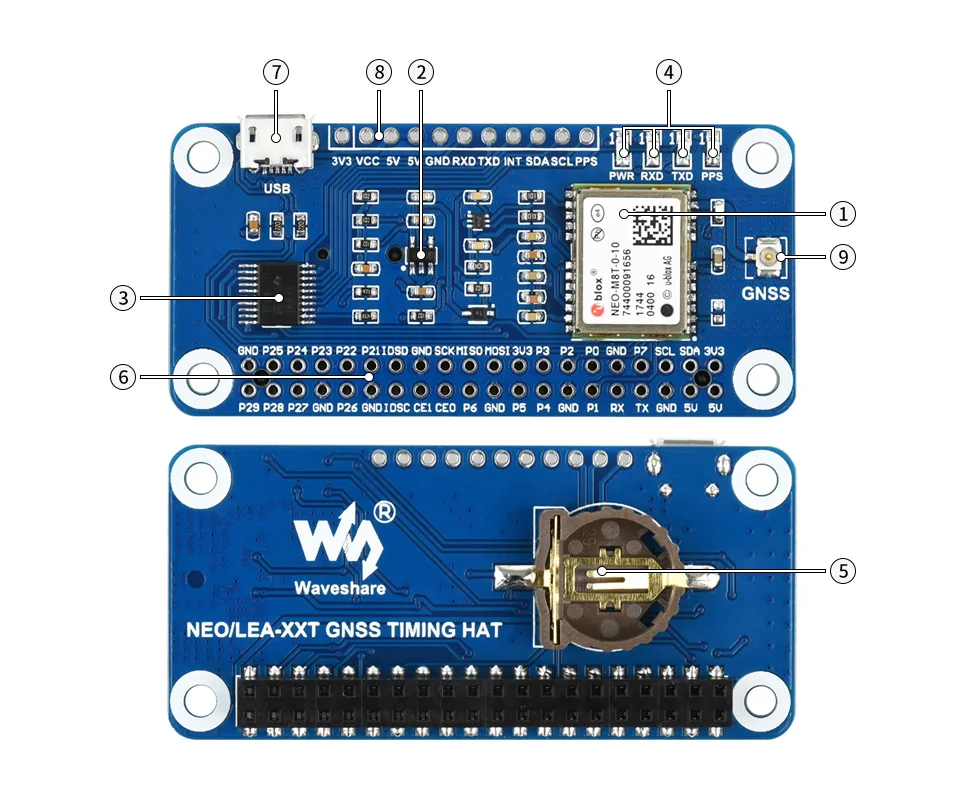
NEO-M8T модуль
RT9193-33Микросхема
TXS0108EPWRНапряжение переводчик
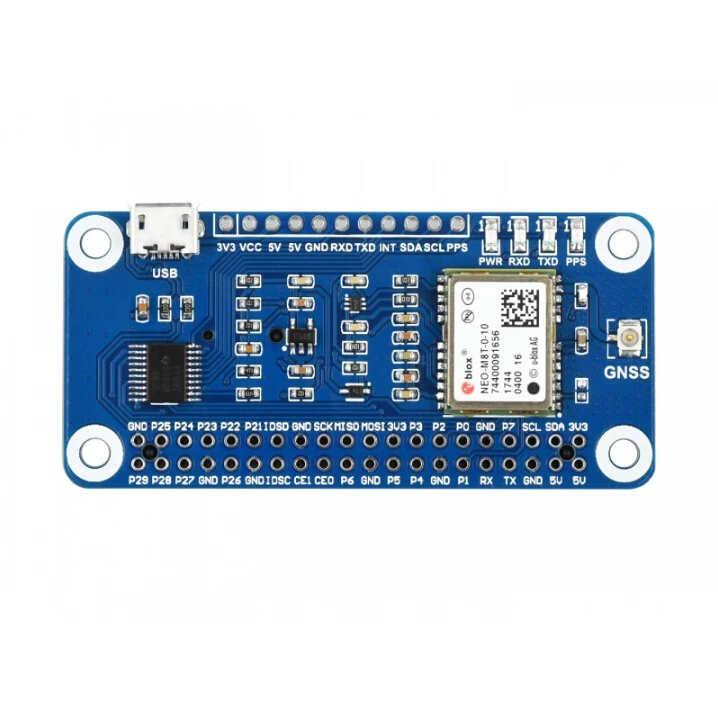
Индикаторы процесса
RXD/TXD: индикатор UART TX/RX
PPS: индикатор состояния GPS
Кнопка включения: индикатор питания
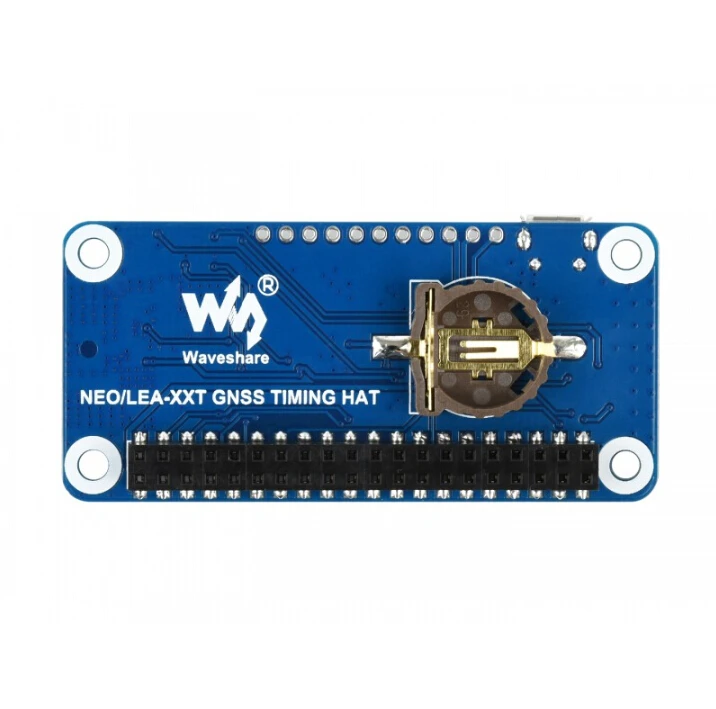
Держатель батареи
Поддерживает перезаряжаемый элемент ML1220, для сохранения информации о глазках и горячих запусков
Raspberry Pi GPIO header
Для подключения с Raspberry Pi
USB порт
UART, I2C интерфейс
Для подключения к другим MCUs
ГНСС антенного разъема
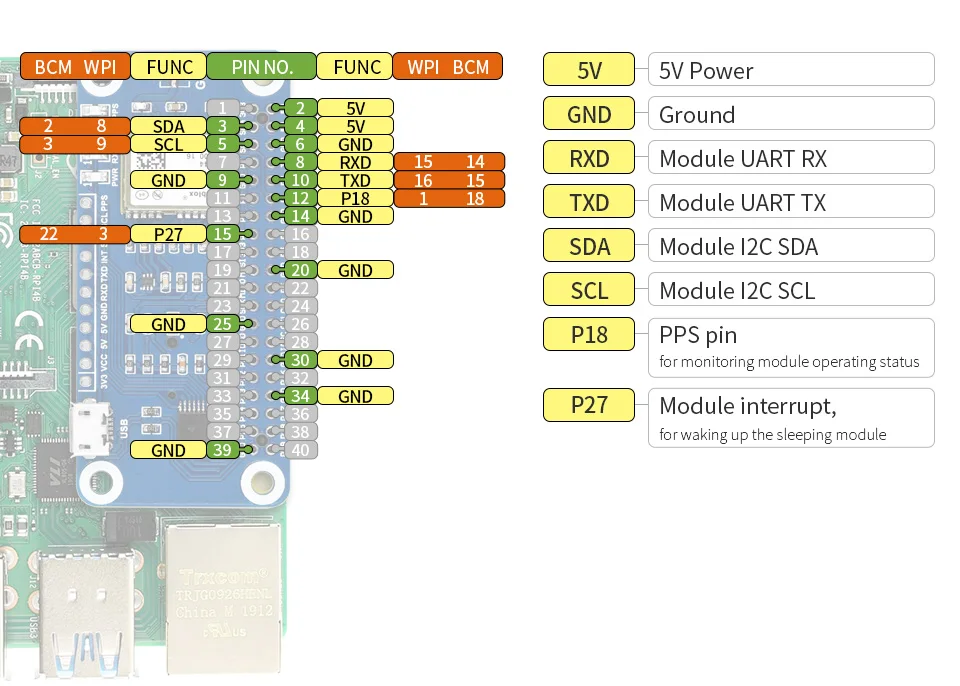
Разводки выводов высокой четкости
Габаритные размеры
Ресурсы и услуги


Вики:Www.wav eshare.com/wiki/NEO-M8T_GNSS_TIMING_HAT
* Ресурсы для различных продуктов могут отличаться, пожалуйста, проверьте вики-страницу, чтобы подтвердить фактически предоставленные ресурсы.
Содержимое упаковки
Вес упаковки:0,131 кг
NEO-M8T ГНСС ГРМ Х1
Внешняя антенна GPS (B) x1
USB-A кабель Micro-B x1
Набор винтов RPi (2 шт.) x1
2x20PIN наружный коллектор x1