




Последнее обновление: 18.09.2024
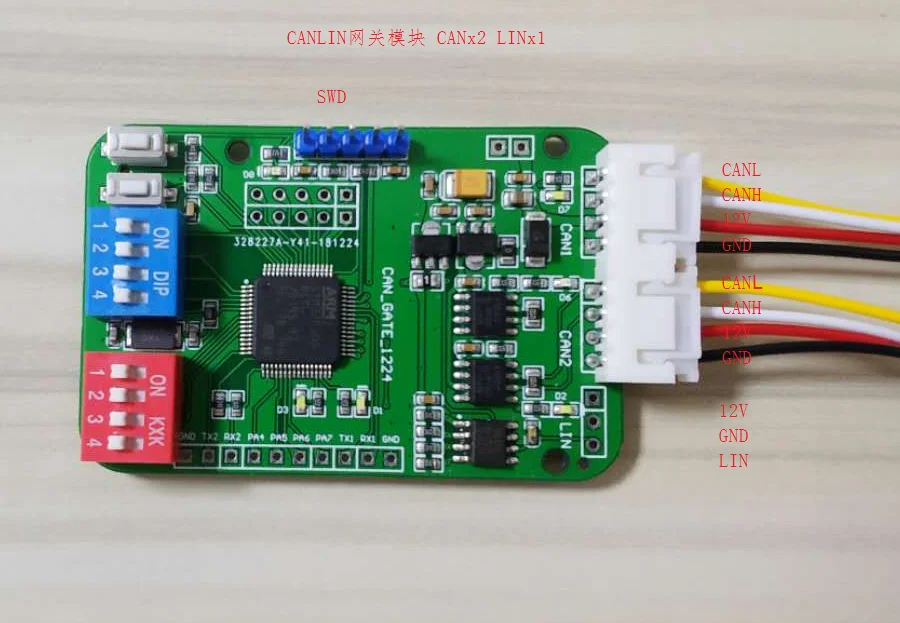
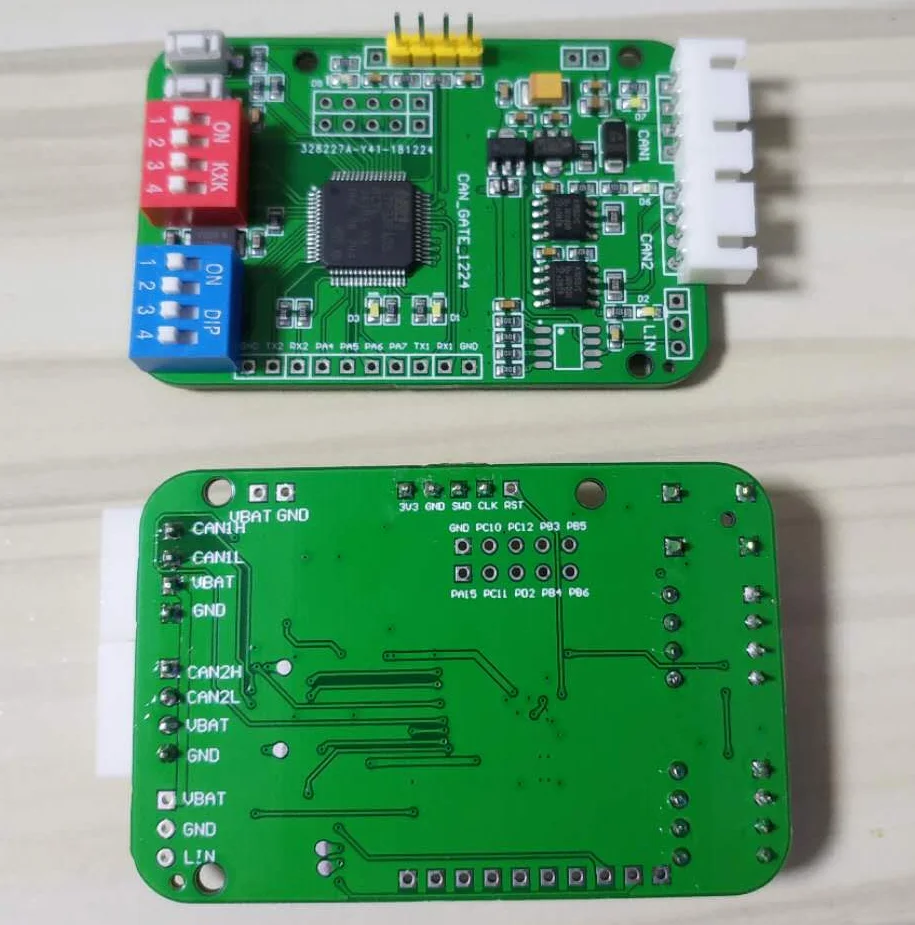
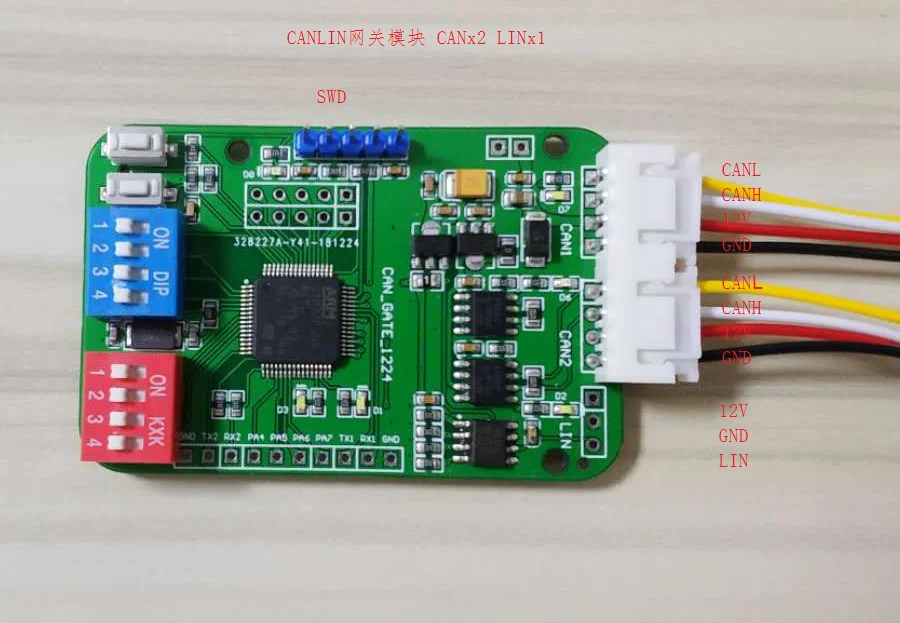
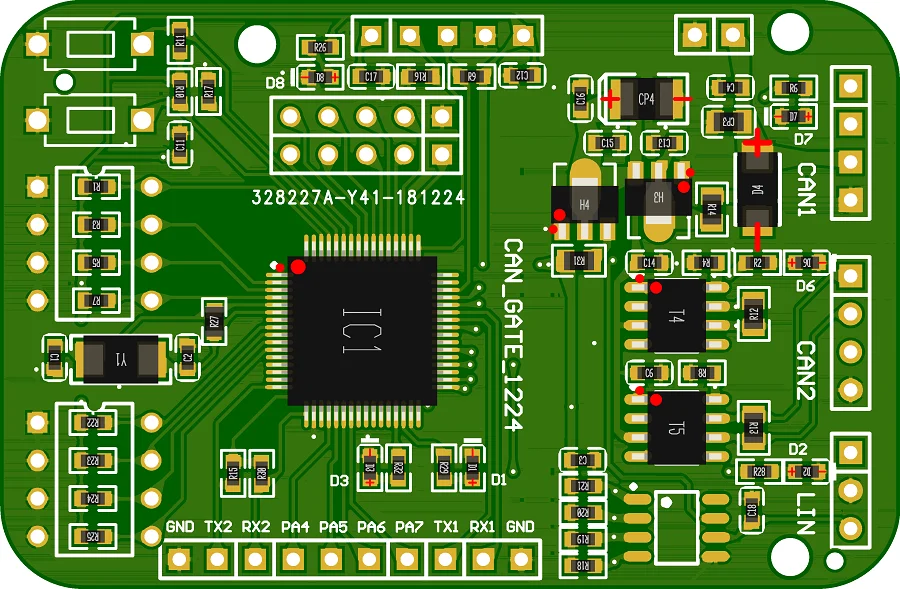
MCU использует чип STM32F105RBT6 посылка пакет lqfp64. Оба могут работать одновременно или работать отдельно, не влияя друг на друга.
Оба способа CAN-это высокоскоростная CAN, и оба используют TJA1050 в качестве трансивера.
Односторонний LIN может использоваться как основной и ведомый режим, используя TJA1021 в качестве трансивера, может поддерживать LIN2.1 и следующий протокол LIN.
Исходный код предоставляет 5 процедур, включая передачу данных CAN1,CAN2,LIN, процедуры получения данных, существует простая процедура шлюза CANLIN, может быть слегка изменена для использования. Этот код также может быть применен к MCU серии STM32F103, но обратите внимание, что связанные с источником CAN2 процедуры не поддерживают серию STM32F103, потому что серия F103 только CAN1 не имеет CAN2, только F105,107 имеет CAN2.
В дополнение к исходному коду и соответствующей информации, больше никакой технической поддержки. Для получения дополнительной поддержки, пожалуйста, приобретите платные технические услуги.
Исходный код будет доступен только в версии IOS + UCOSII. Поскольку продукция CANLIN gateway предъявляет высокие требования к производительности в режиме реального времени, не рекомендуется использовать архитектуру программы.
------------------------------------
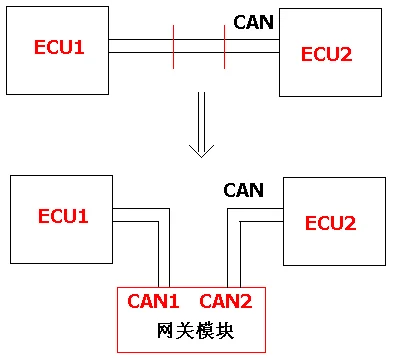
Наиболее подходящий способ использования модуля шлюза CAN-это последовательность, а не параллельная, которая следующая:
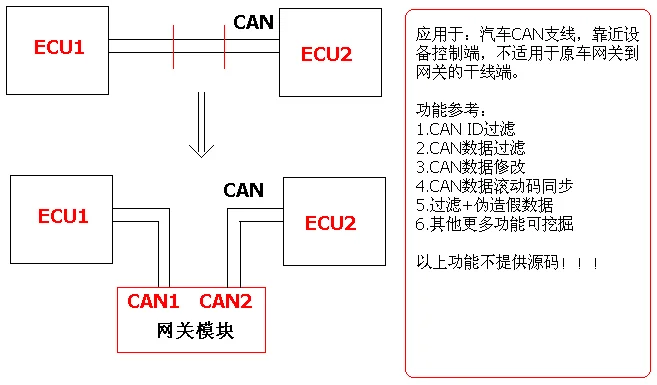
Этот режим подключения может реализовать следующие функции:
1. Может фильтрация данных: может отфильтровывать некоторые сигналы в данных шины CAN, такие как номер кадра, код неисправности, скорость, общий пробег, скорость и т. д., таким образом, эти данные не могут играть определенную роль;
2. Может модификация данных: может изменять указанные данные связи между ECU1 и ECU2, которые могут использоваться для создания фейковых сигналов CAN, таких как номер кадра, скорость, общий пробег и т. д.;
3. Команда управления координацией: многие данные оригинального автомобиля имеют встроенную функцию синхронизации, которая также называется простым алгоритмом прокатки. Третьвечерние на не может управлять транспортным оборудованием через данные CAN, поэтому более сложные функции управления могут быть реализованы через шлюз CAN, который сложнее взломать.