







Последнее обновление: 29.05.2022


1. Описание:
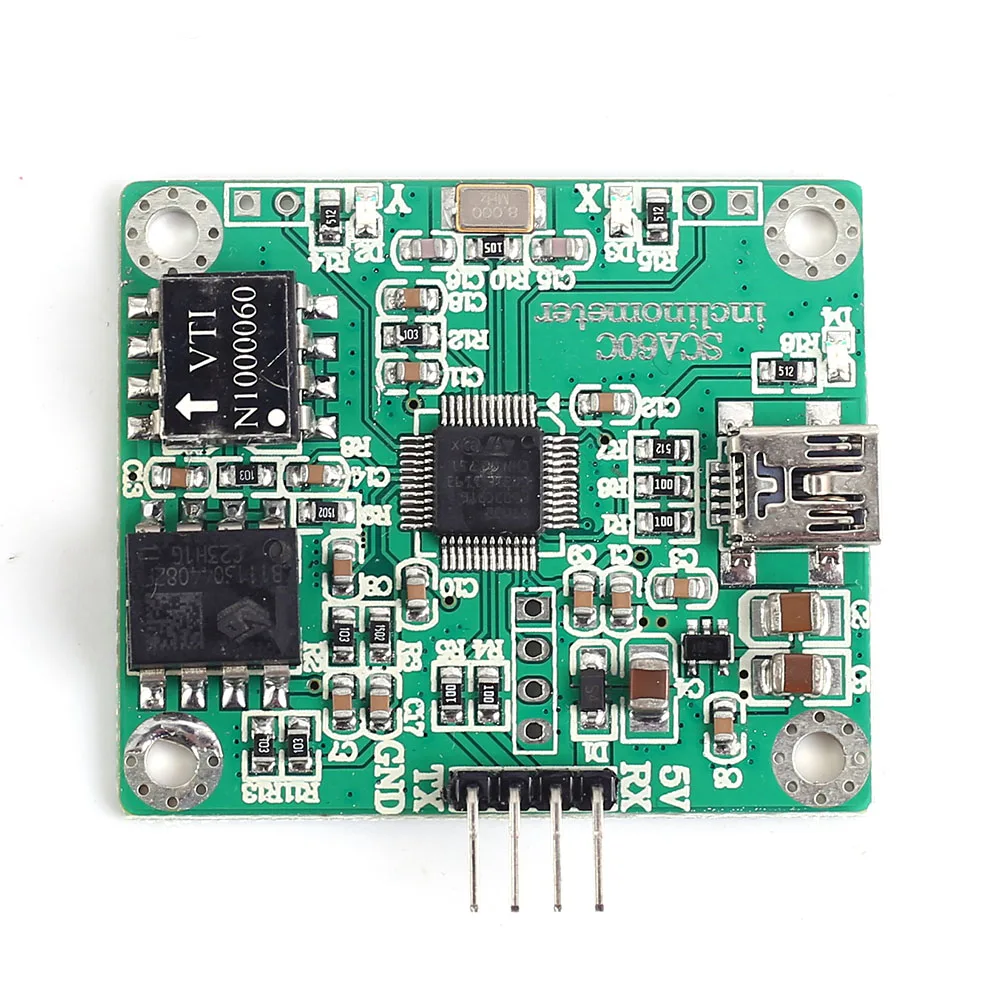
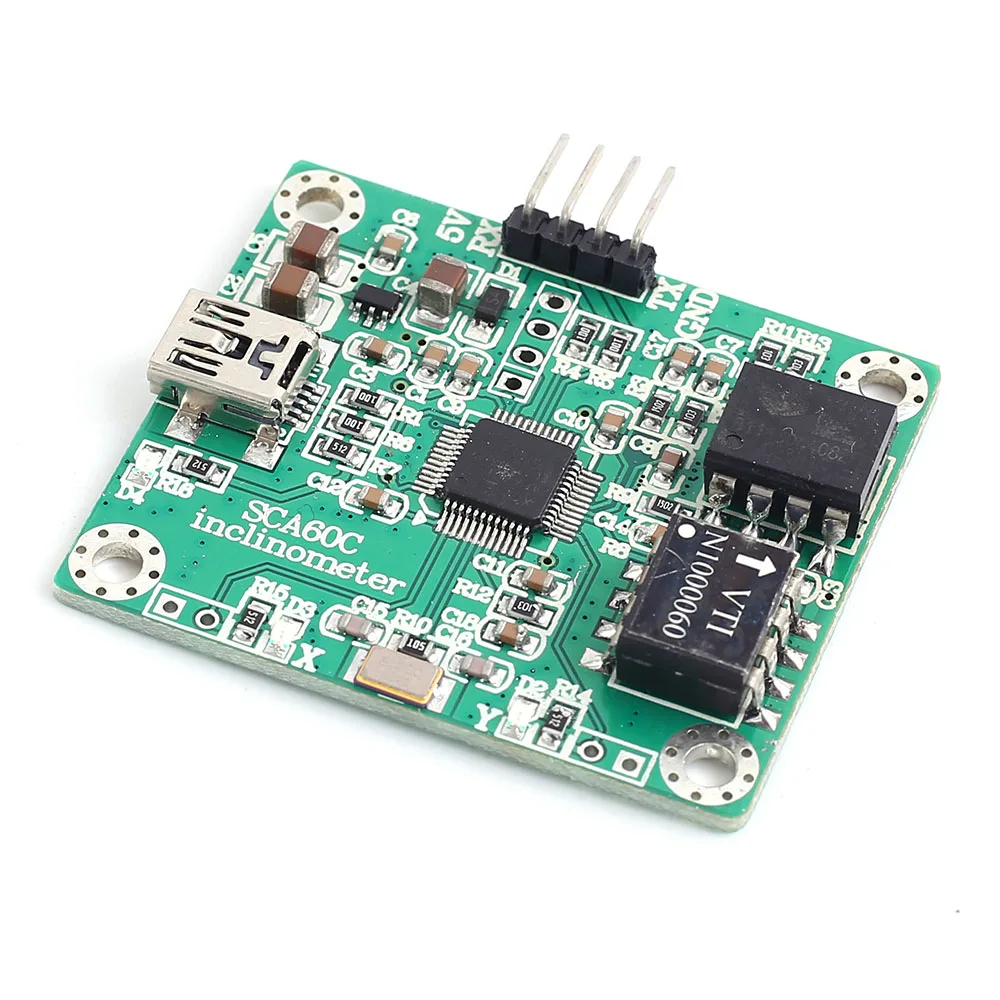
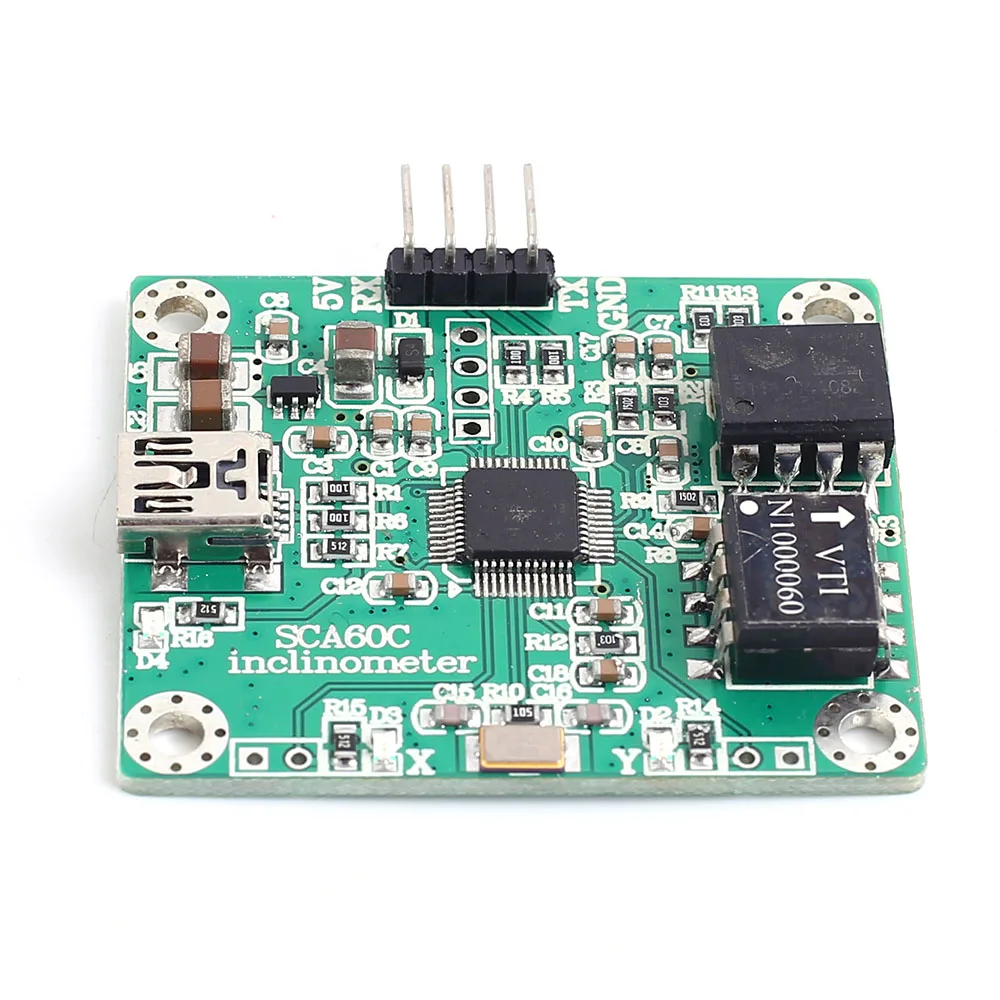
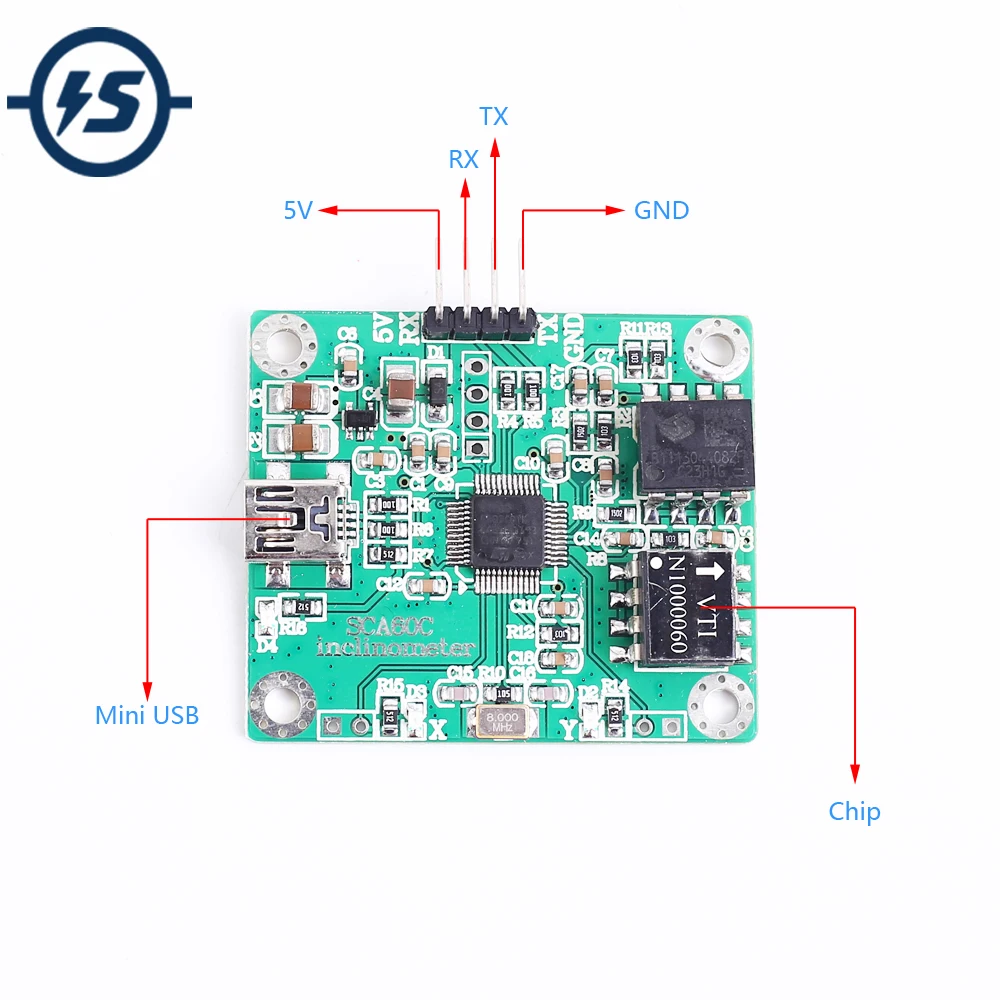
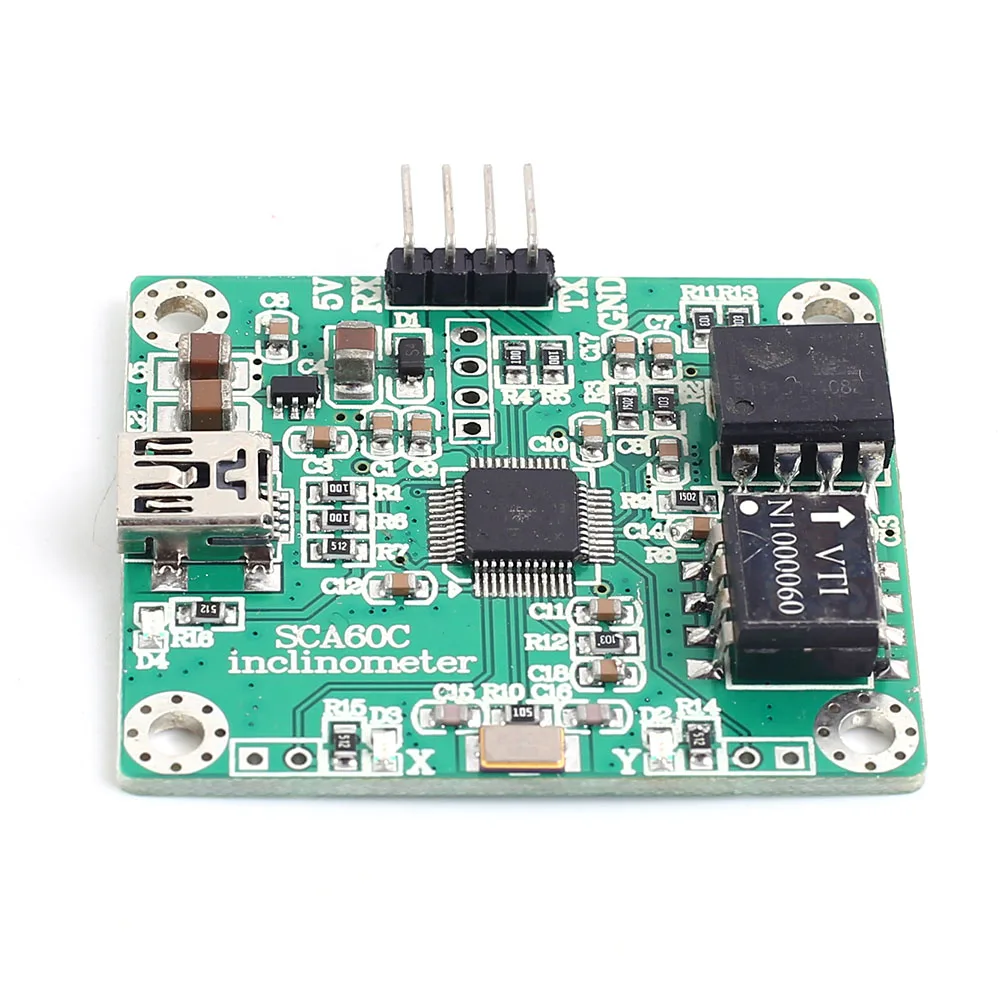
Это модуль двухосного датчика наклона. Он используется для Интеллектуальное обнаружение баланса тела, обучающий эксперимент и демонстрационная разработка продукта и т. д.
2. Особенности:
1>.UART напрямую считывает значение температуры
2>. Адаптация к MCU и ПК
3>. Можно установить значение сигнала тревоги
4>. Одночиповым компьютером удобнее и быстрее обрабатывать значение прямого угла считывания.
5>. Двухосевой Квадратичный сигнал тревоги с наклоном.
6>. Диапазон сигнала тревоги по оси X и по оси y составляет-90 ° ~ 90 °,-90 ° ~ 90 °, который можно регулировать во всех направлениях.
3. Описание:
1>. Название продукта: модуль двухосного датчика наклона
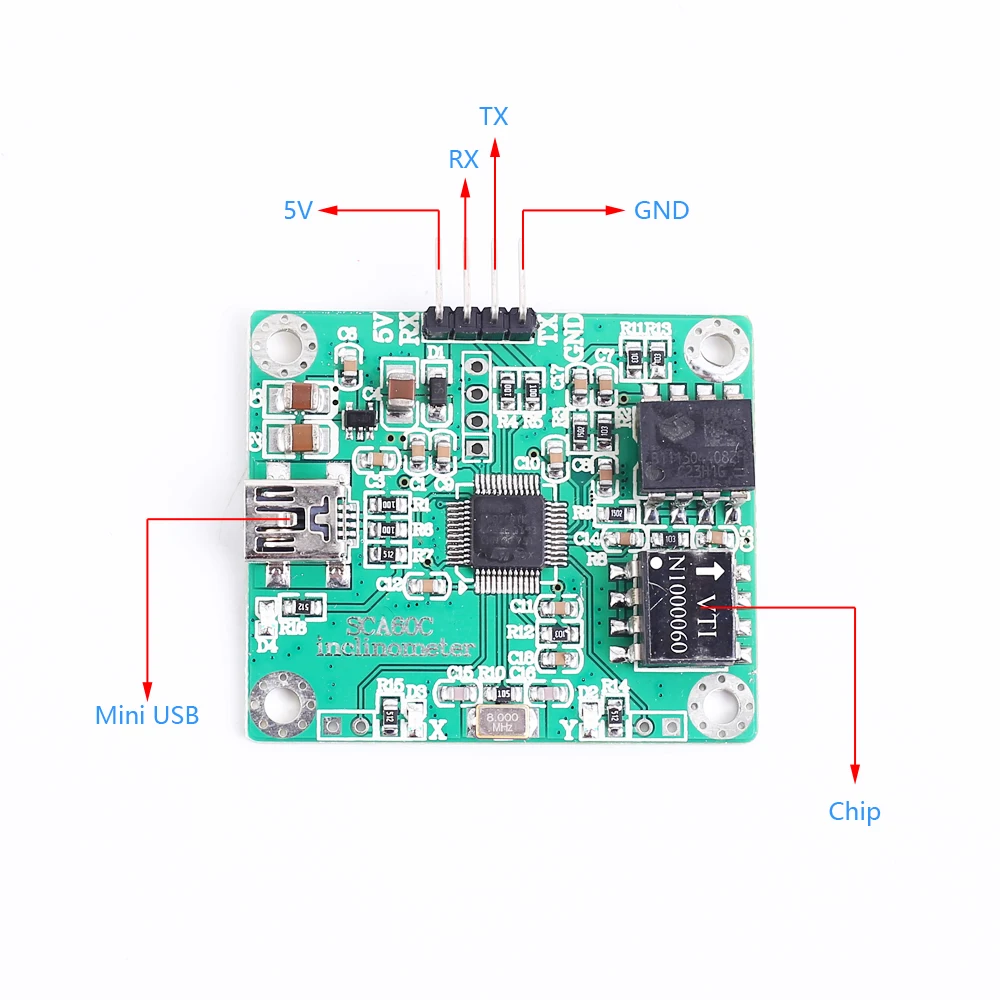
2>. Рабочее напряжение: 5 В
3>. Рабочий ток: 40 мА (макс.)
4>. Основной чип: MCU, датчик наклона
5>. Рабочая температура:-25 ℃ ~ 85 ℃
6>. Рабочая влажность: 5% ~ 95% относительной влажности
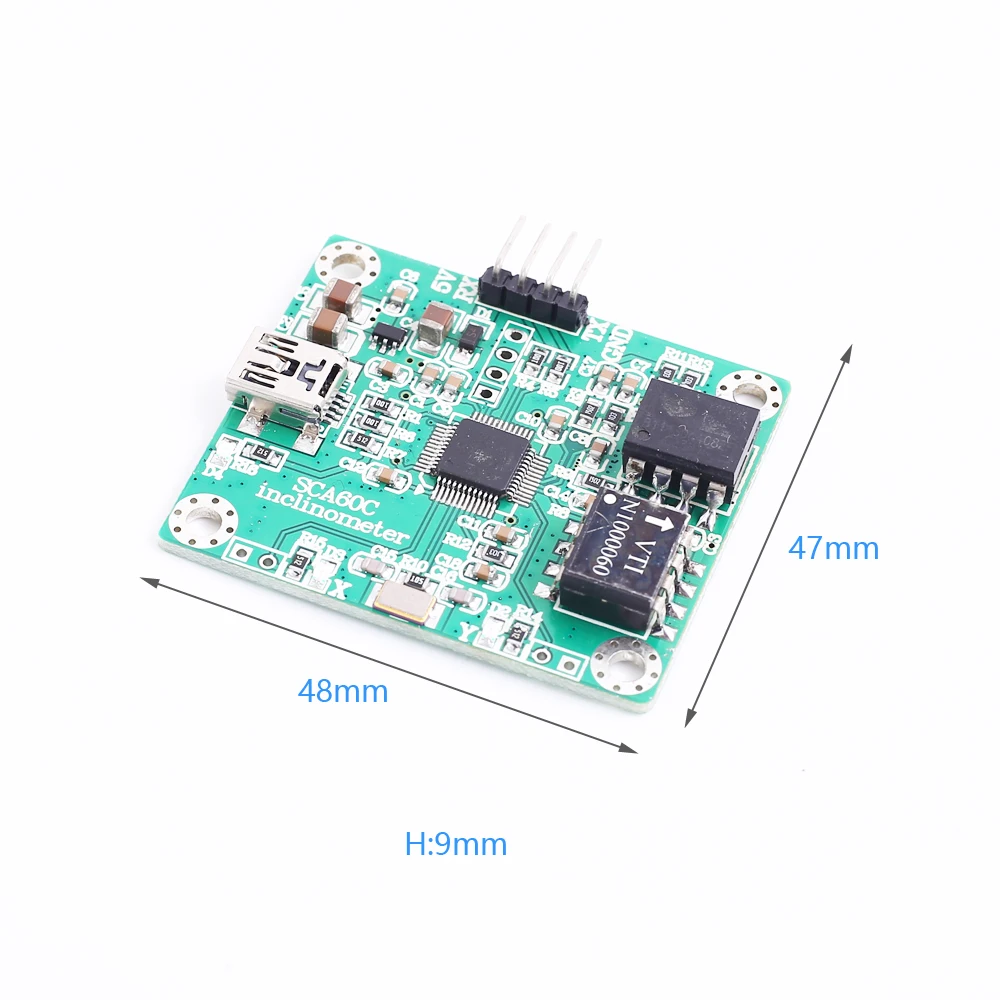
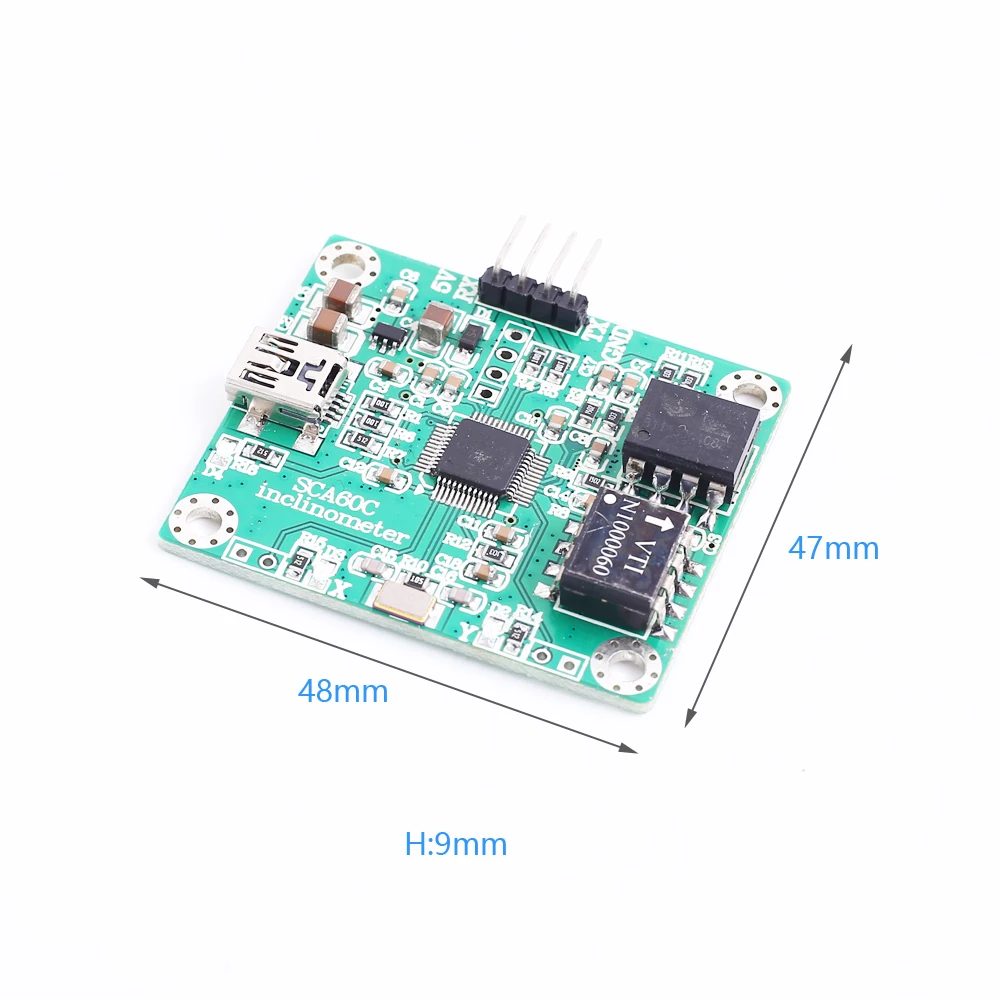
7>. Размер: 48*47*9 мм
4.AT команда (поместите курсор на вторую строку при отправке):
1>. Тест связи:
1,1>. Отправка: AT
1,2>. Возврат: ок
2>. Считывание смещения оси X:
1,1>. Отправка: AT + X
1,2>. Возврат: + X = Смещение оси X
Ок
3>. Установите высокий порог сигнализации по оси X:
1,1>. Отправка: AT + XERRUP + высокий порог сигнализации
1,2>. Возврат: + XS = Смещение оси X
Ок
4>. Установите низкий порог сигнализации по оси X:
1,1>. Отправка: AT + TERRDOMN + низкий порог сигнализации
1,2>. Возврат: + X = Смещение оси X
Ок
5>. Установите светильник тревоги по оси X для освещения за пределами двух порогов:
1,1>. Отправка: AT + XP + 1
1,2>. Возврат: + X = Смещение оси X
Ок
6>. Настройки коррекции оси X:
1,1>. Отправка: AT + XADJ + IN
1,2>. Возврат: + X = Смещение оси X
Ок
7>. Установите количество исправлений:
1,1>. Отправка: AT + XADJ + время коррекции
1,2>. Возврат: + FADJ_LEN = время коррекции
Ок
8>. Чтение смещения оси Y:
1,1>. Отправка: AT + Y
1,2>. Возврат: + Y = Смещение по оси Y
Ок
9>. Установите высокий порог сигнализации по оси Y:
1,1>. Отправка: AT + YERRUP + высокий порог сигнализации
1,2>. Возврат: + Y = Смещение по оси Y
Ок
10>. Установите низкий порог сигнализации по оси Y:
1,1>. Отправка: AT + TERRDOMN + низкий порог сигнализации
1,2>. Возврат: + Y = Смещение по оси Y
Ок
11>. Установите светильник тревоги по оси Y для освещения за пределами двух порогов:
1,1>. Отправка: AT + YP + 1
1,2>. Возврат: + Y = Смещение по оси Y
Ок
12>. Настройки коррекции по оси Y:
1,1>. Отправка: AT + YADJ + IN
1,2>. Возврат: + Y = Смещение по оси Y
Ок
13>. Установите количество исправлений:
1,1>. Отправка: AT + YADJ + время коррекции
1,2>. Возврат: + FADJ_LEN = время коррекции
Ок
5 посылка:
1>.1 шт. двухосный модуль датчика наклона
2>.4 медных столба
3>.4 гайки
4>.1 шт. кабель для передачи данных
![]()