




Последнее обновление: 21.03.2022
Мы используем импортные чипы, а также импортный интерфейс USB, который обладает более сильной защитой от помех. Продажа здесь принесет вам больше пользы.
Трехконтурное управление: контур положения контура скорости.
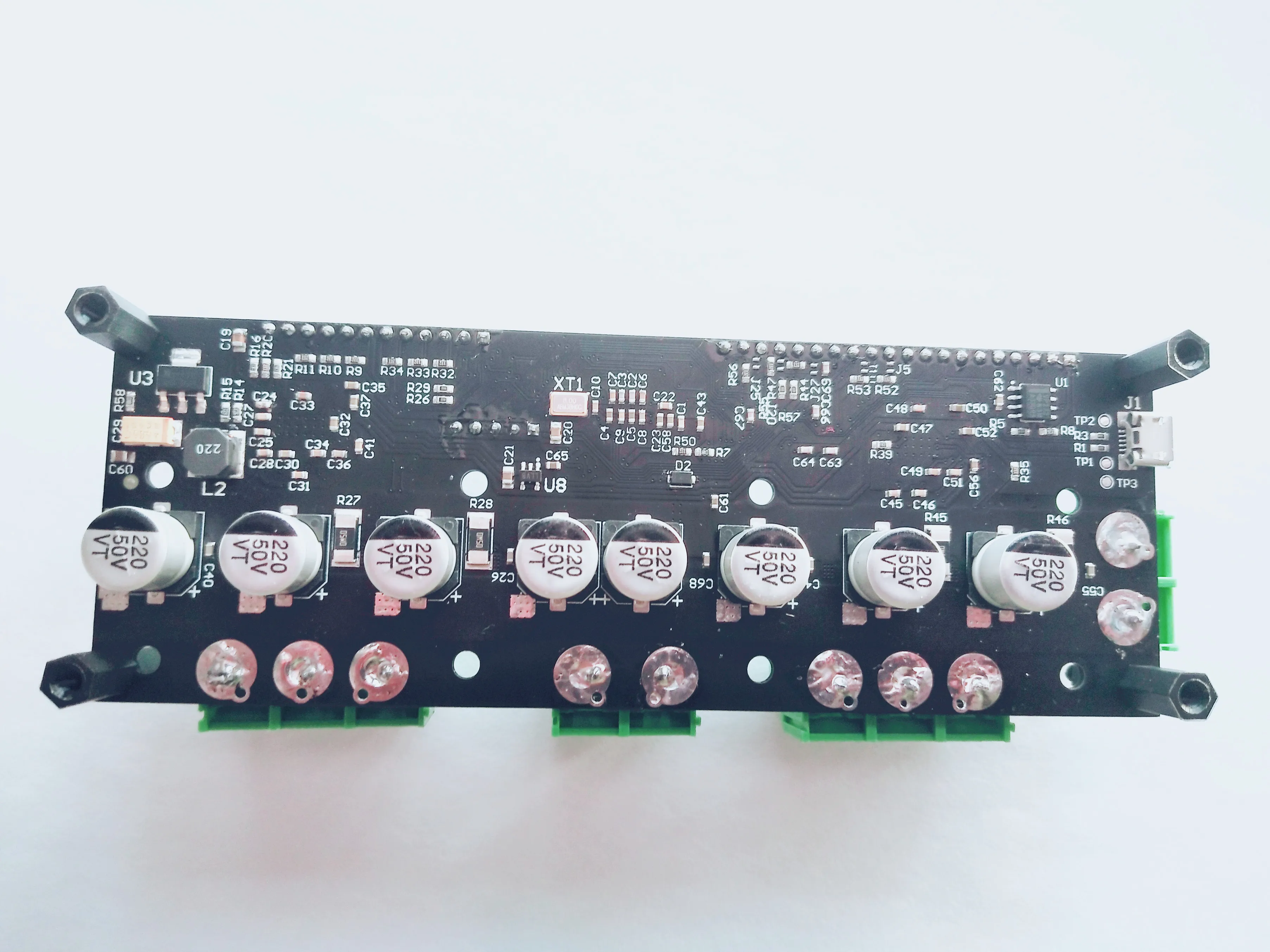
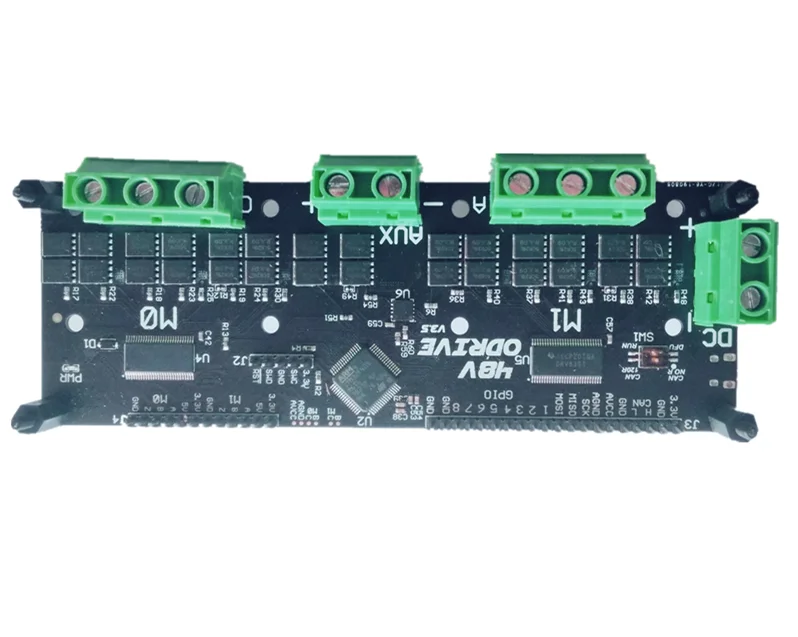
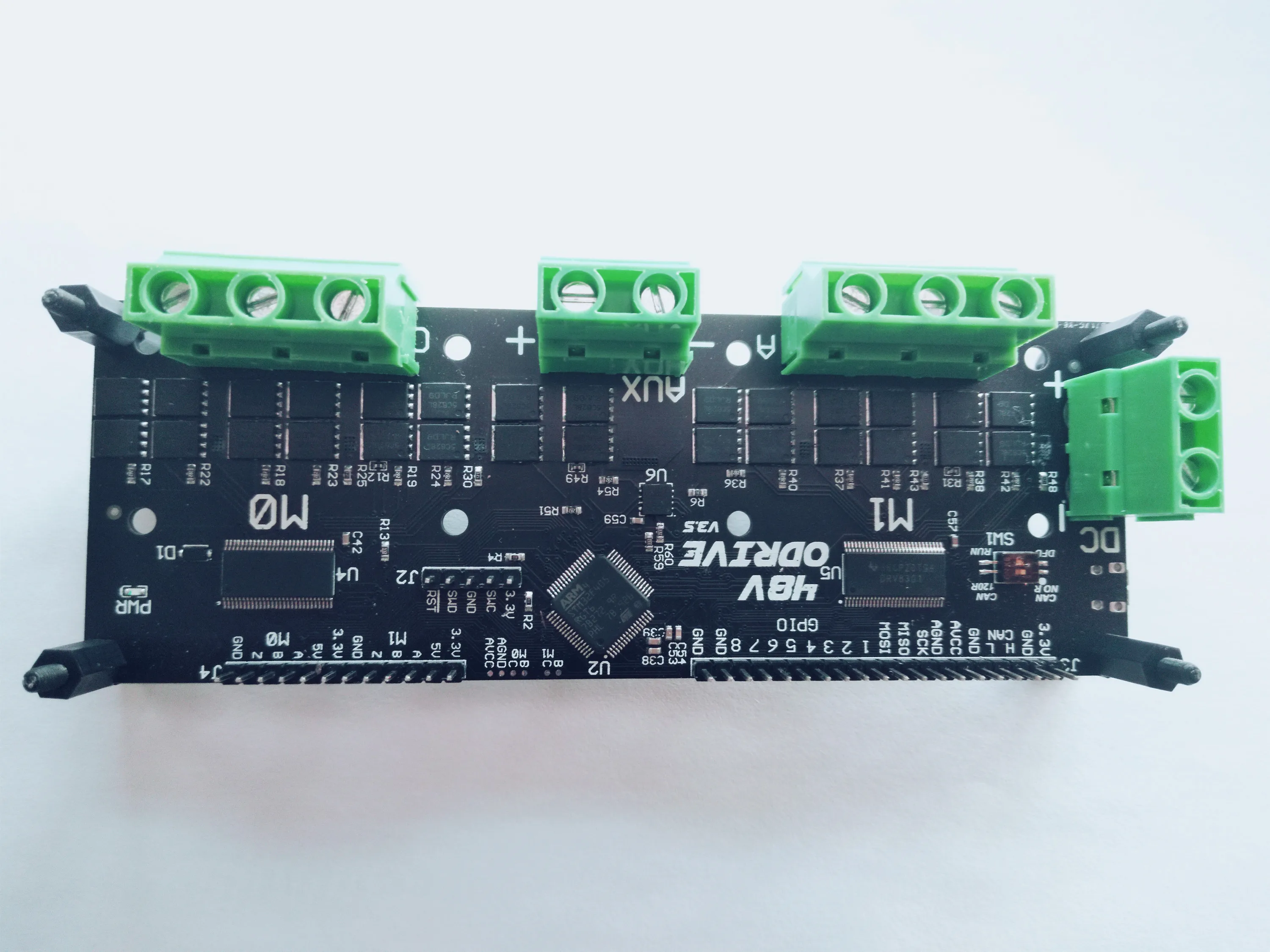
Улучшенная версия ODriver V3.5 48 В.
Сгорела прошивка, плата проверена и отправлена.
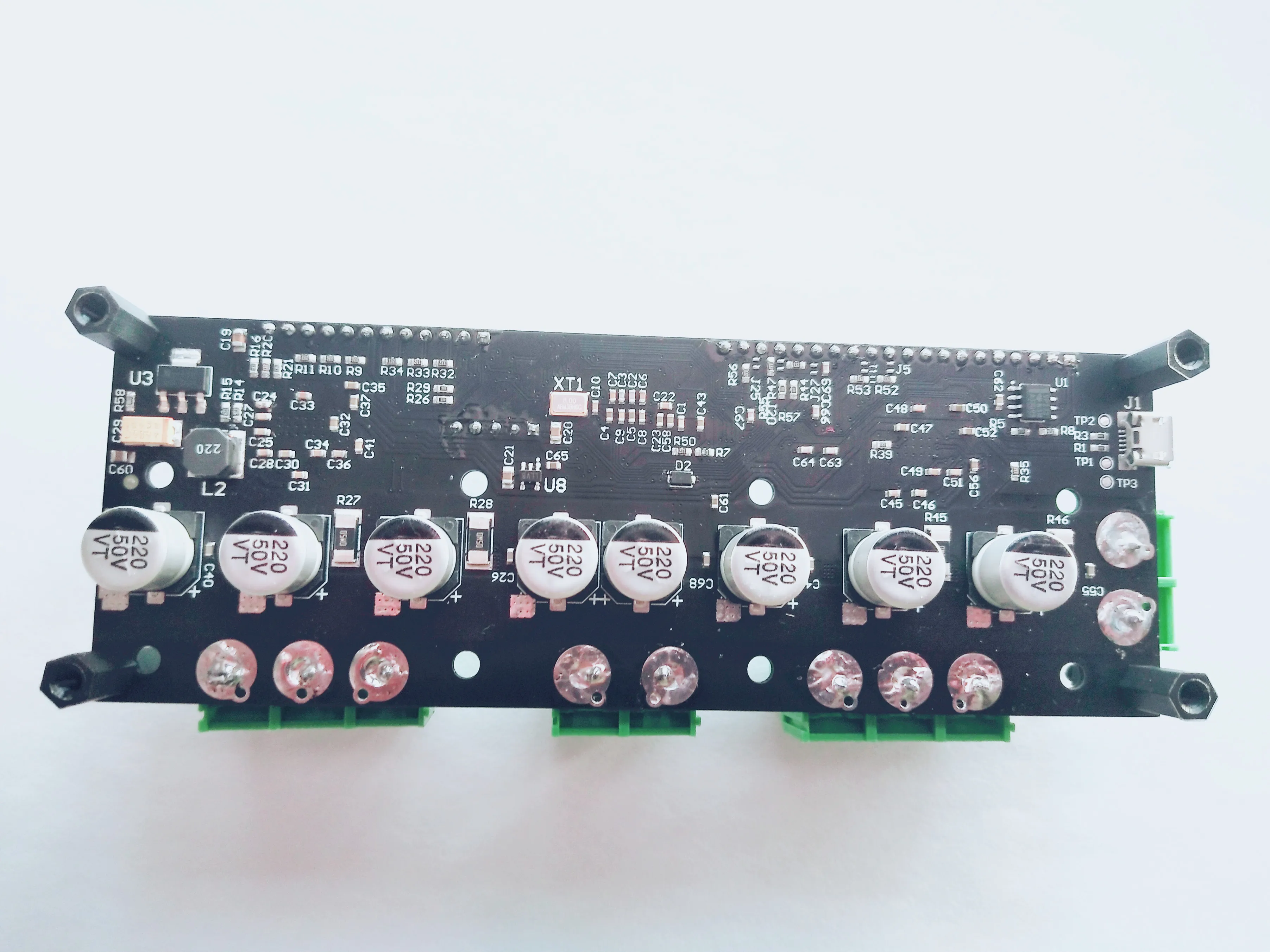
Отправьте резистор мощности разряда.
Проводка инженера привода двигателя для обеспечения точности тока.
Предоставляет сводную документацию по командам отладки для простой разработки.


Перевод следующий:
Этот проект направлен на вождение бесщеточных двигателей, которые являются дешевыми. Цель-использовать дешевые бесщеточные двигатели в высокопроизводительных робототехнических проектах
Начало работы
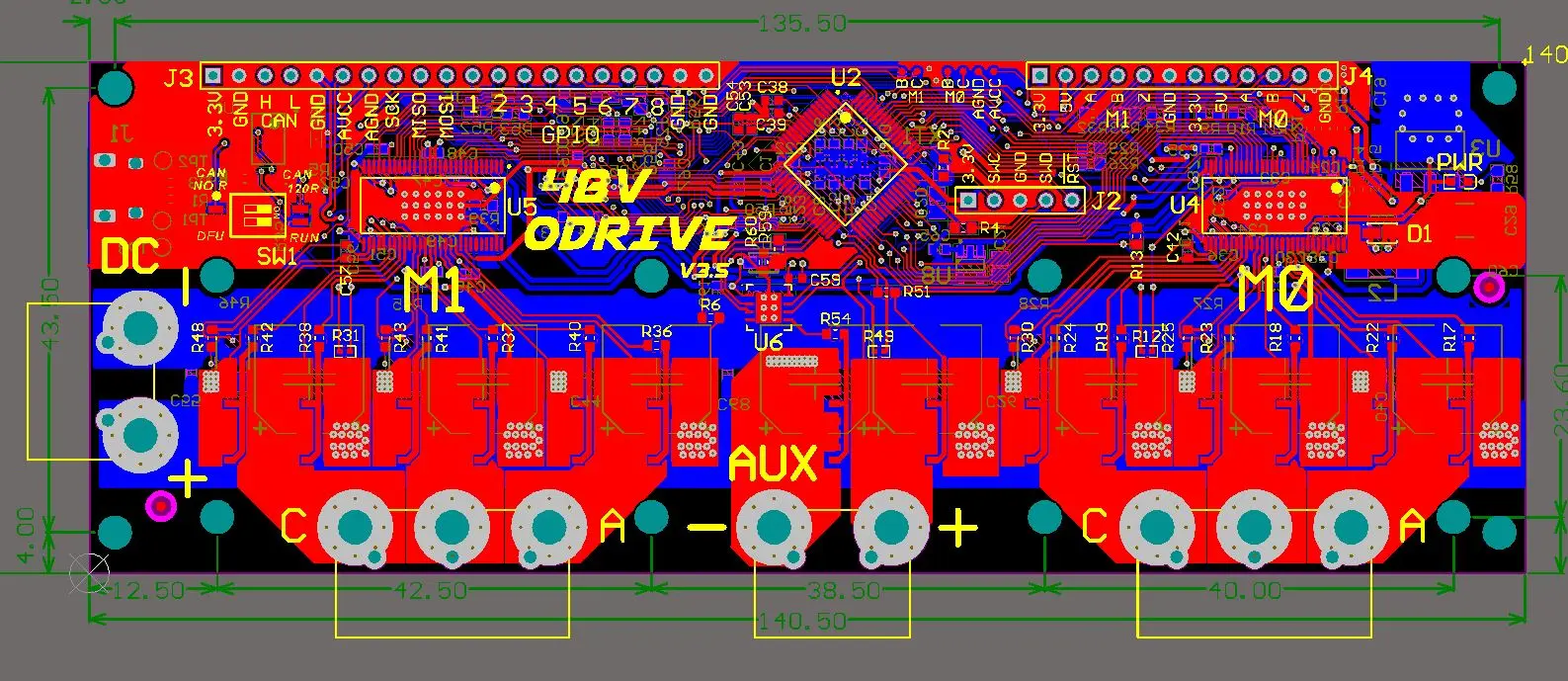
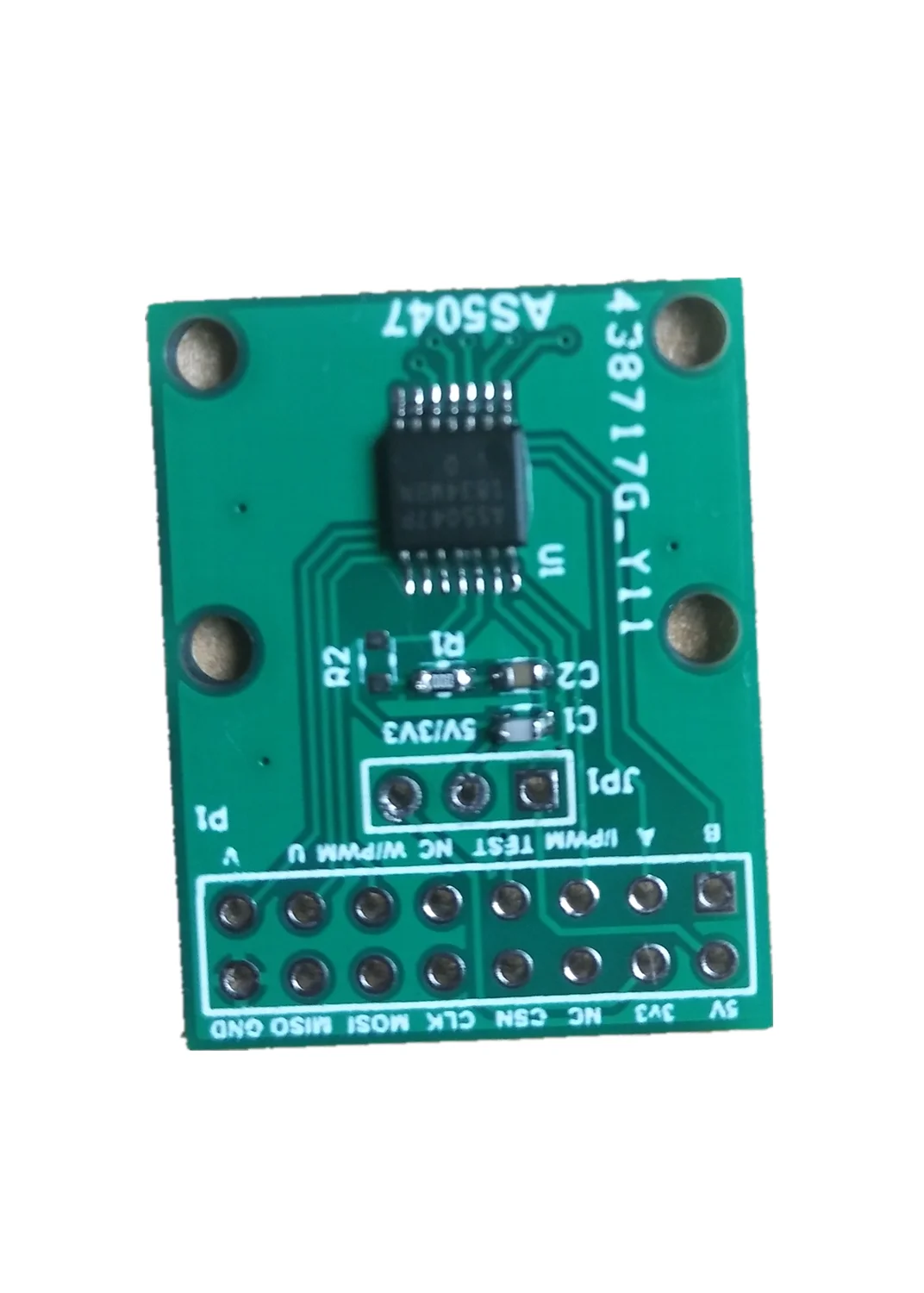
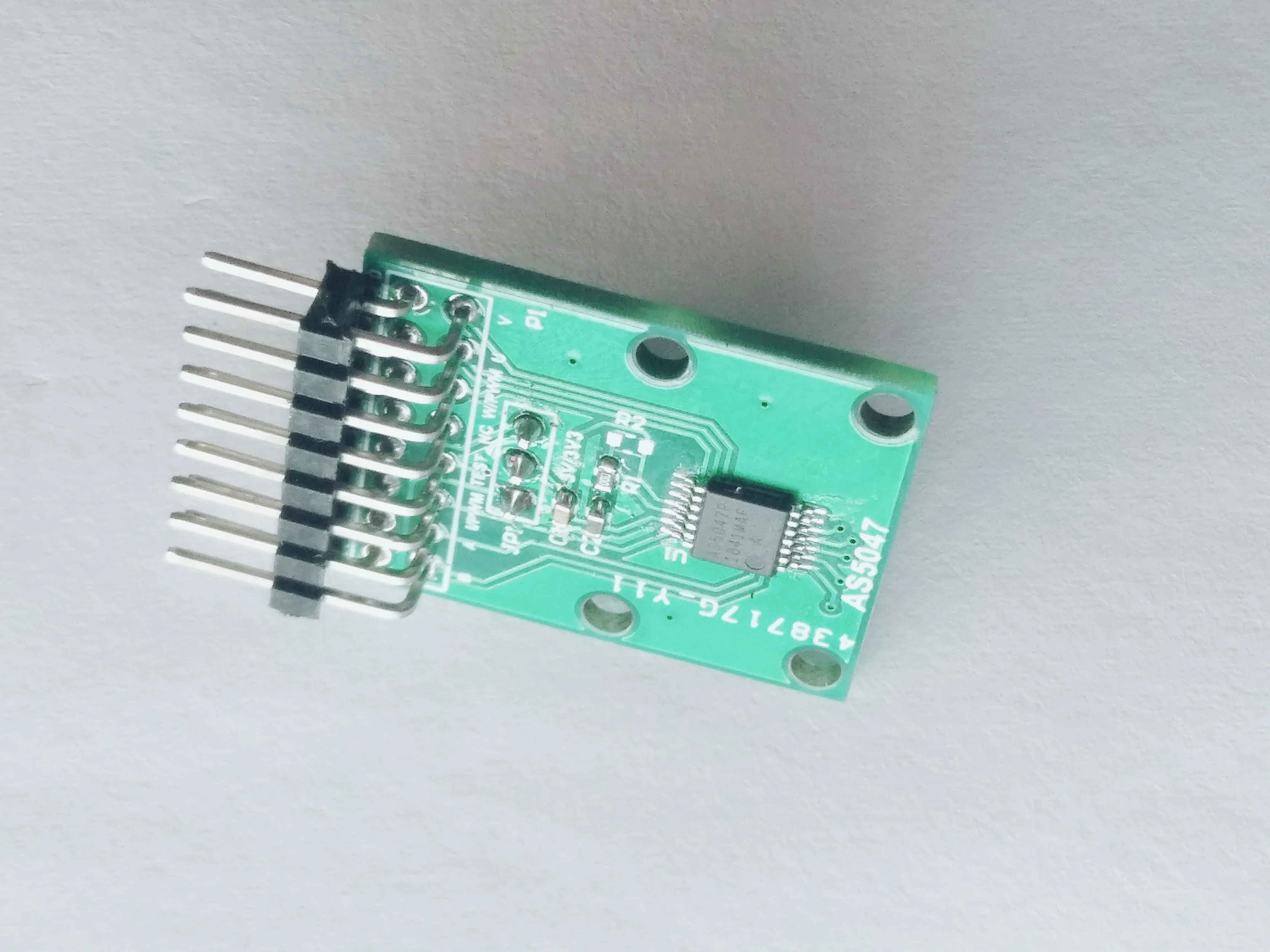
Тест можно начать с помощью одного двигателя и кодировщика, без проблем, даже рекомендуется. Убедитесь, что существует Хорошее механическое соединение между кодировщиком и двигателем. Скольжения могут вызвать катастрофические колебания. Все устройства ввода-вывода без питания имеют выход 3,3 В и погрешность на входе 5 В, за исключением: в ODrive v3.2 и более ранних версиях GPIO 3 и GPIO 4 не поддерживают напряжение 5 В. Вам нужен один или два бесщеточных двигателя, Квадратурные инкрементные энкодеры и резисторы мощности. Необходимое вам значение сопротивления мощности зависит от настроек двигателя и максимальной/средней мощности смещения. Хорошей отправной точкой является резистор 0,47 Ом, 50 Вт. Подключите двигатель к 3-фазной винтовой клемме и подключите резистор питания к клемме AUX. Подключите источник питания (12-24 В) к клемме постоянного тока, обращая внимание на полярность. Не применяйте питание сейчас. Подключите кодировщик к J4. Требуются фазы A и B, и Z (индекс импульса) является необязательным. Линии A, B и Z имеют натягивающий резистор 3,3 k для выхода энкодера открытого стока. Для односторонних push-pull сигналов со слабым током вождения (<4 мА), возможно, вам понадобится снять подтягивающий резистор.
В настоящее время Поддерживаются режимы команд: USB, UART и STEP / DIR.
Если вы отправляете команды через USB, вы можете подключить кабель к порту micro-USB. Если вы отправляете команды через UART, см. Настройку UART, если вы используете STEP / DIR, см. Раздел настройки STEP / DIR
Теперь вы можете: загрузить и создать прошивку. Настройте параметры прошивки. Вставьте прошивку на плату. Запустите программу.
Процедура запуска показана здесь.
Примечание: ротор должен вращаться во время запуска без какой-либо смещенной нагрузки. Это означает, что и масса, и слабые фрикционные нагрузки хороши, но тяжесть или Пружинные нагрузки не хороши. Также обратите внимание, что в видео Двигатель вращается после инициализации, но в текущем программном обеспечении поведение по умолчанию-установить регулятор положения в положение 0 (то есть положение при запуске)
Если у вас есть кодировщик с сигналом индекса (Z), вы можете откалибровать один раз и возобновить калибровку при запуске. Инструкции по этому поводу приведены здесь.
Отправить команду
Это записывает отправку команд USB и UART. Вы также можете посмотреть библиотеку ODrive Arduino, которая упрощает использование интерфейса UART на Arduino. Вы также можете рассматривать это как пример реализации взаимодействия с ODrive через UART.
Настройка UART
Скорость передачи: 115200 контактов назначение:
GPIO 1: Tx (Rx подключен к другим устройствам)
GPIO 2: Rx (Tx подключен к другим устройствам)
GND: необходимо соединить заземляющие провода устройства вместе. Используйте любой контакт GND на J3 ODrive.
Чтобы включить режим UART для GPIO, см. Настройку режима GPIO.
Установка шага/реле
Штифт:
GPIO 1: шаг M0
GPIO 2: M0 DIR
GPIO 3: шаг M1
GPIO 4: M1 DIR
GND: необходимо соединить заземляющие провода устройства вместе. Используйте любой контакт GND на J3 ODrive.
Обратите внимание, что в gpi_3 и gpi_4 не допускаются уровни 5 в на ODrive v3.2 и ниже, поэтому сигналы 3,3 В! ODrive v3.3 и выше имеют терпимые контакты GPIO 5 В.
Чтобы включить режим step / dir GPIO, см. Раздел Настройка режима GPIO.
Существует также Новая переменная конфигурации, называемая counts_per_step, которая определяет количество кодеров для "размера шага". Это может быть любое значение плавающей точки. Скорость шагов ожидает тестирования, но она должна выдерживать как минимум 16 кгц. Если вы хотите протестировать его, обратите внимание, что режимы отказов с чрезмерно высокой скоростью шага, как ожидается, будут отключением двигателя и подкачиванием.
Обратите внимание, что линия сейчас не включена, и интерфейс шага/направления включен по умолчанию, и он остается активным до тех пор, пока ODrive находится в режиме управления положением. ODrive по умолчанию запускается в режиме управления позицией, поэтому вам не нужно отправлять какие-либо команды через USB для начала работы. При желании вы можете отправить USB-команды.
Обратите внимание, что бортовые термисторы R12, R31, R48 используются для измерения повышения температуры МОП-транзистора Odrive, чтобы предотвратить перегрев МОП.
ODrive документация:Http://docs.odriverobotics.com
Перевод веб-страниц с помощью браузера