





Последнее обновление: 27.09.2024
Тип 1: макетная плата
Тип 2: разработка платы маленький двигатель энкодер
Тип 3: макетная плата, большой двигатель
STM32 плата разработки управления двигателем V17.3
Плата управления двигателем используется для управления бесщеточным двигателем постоянного тока, синхронным двигателем с постоянным магнитом, трехфазным асинхронным двигателем переменного тока, в основном для пользователей, которые учатся управлению двигателем, реализовывать или проверять алгоритм управления двигателем, И разработка моторных продуктов. Цель предоставления этих решений заключается в том, чтобы позволить людям быстро начать делать свои собственные продукты. В настоящее время существует две платы разработки, основанные на DSP28335 и STM32.
Применимые объекты:
1. Разработаны проекты моторных продуктов, реализованы и проверены алгоритмы;
2. Изученный алгоритм управления двигателем,
3. Наука и инновации в области управления двигателем, дизайна и дизайна курса,
Цель
1. Бесщеточный Датчик Холла с квадратной волновой скоростью, током и двойным циклом управления PID
2. Бесщеточный Бессенсорный квадрат скорости волны постоянного тока, ток, двойной алгоритм управления PID замкнутым циклом
3. PMSM ABZ Ортогональный кодер FOC, SVPWM, скорость, ток, двойной замкнутый алгоритм управления PID
4. Синхронный Датчик Холла с постоянным магнитом FOC, SVPWM, скорость, ток, двойной алгоритм управления PID с замкнутым циклом
5. PMSM не имеет обнаружения FOC, SVPWM, скорости, тока и двойного закрытого цикла PID алгоритм управления
6. Асинхронный алгоритм управления VF переменного тока
Плата управления двигателем STM32 используется для бесщеточного двигателя постоянного тока, синхронного двигателя с постоянным магнитом и трехфазного асинхронного двигателя переменного тока, в основном для пользователей, которые учатся управлять двигателем, реализовать или проверить алгоритм управления двигателем и разработать двигательные продукты.
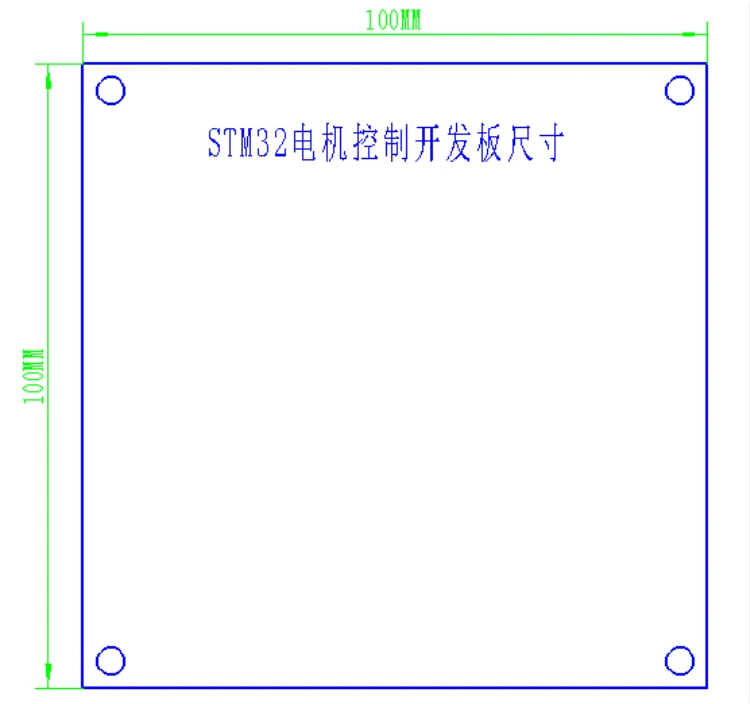
Макетная плата параметры
STM32 плата управления двигателем
1) напряжение источника питания панели управления: 24 В (макс. 60 в)
2) Панель управления не подключена к двигателю. Нормальный рабочий ток: 60 мА
3) Максимальная грузоподъемность: 120 Вт (увеличение напряжения, увеличение мощности)
4) Максимальный фазовый ток 25А и номинальный фазовый ток 10А
5) Пробоотборный ток шины, Пробоотборный Ток фазы, настройка перегрузки по току и защита;
Макетная плата параметры
STM32 плата управления двигателем
1) напряжение источника питания панели управления: 24 В (макс. 60 в)
2) Панель управления не подключена к двигателю. Нормальный рабочий ток: 60 мА
3) Максимальная грузоподъемность: 120 Вт (увеличение напряжения, увеличение мощности)
4) Максимальный фазовый ток 25А и номинальный фазовый ток 10А
5) Пробоотборный ток шины, Пробоотборный Ток фазы, настройка перегрузки по току и защита;
Сигнал обратной электродвижущей силы выглядит следующим образом:
60PM100W03: трехфазный двигатель с постоянным магнитом с трехфазным датчиком положения холла. Этот двигатель является профессиональным настраиваемым трехфазным постоянным магнитом с синусоидальной задней электродвижущей силой. Векторное управление FOC-это Управление PMSM; Шестиступенчатое импульсное переключение PWM-это Управление BLDC; Асинхронное управление VF переменного тока может быть сделано в этой демонстрации низкой скорости двигателя, для изучения принципа VF инвертора переменного тока.
1) Модель двигателя: 60PM100W03
2) напряжение источника питания: 24 В
3) Мощность: 100 Вт (номинальная), 200 Вт (пиковая)
4) Скорость: 3000 об/мин
5) напряжение питания зала: 5 В
6) Журнал полюсов: 4
Счетчик электродвижущей силы волны выглядит следующим образом: счетчик электродвижущей силы волны около 2500 об/мин
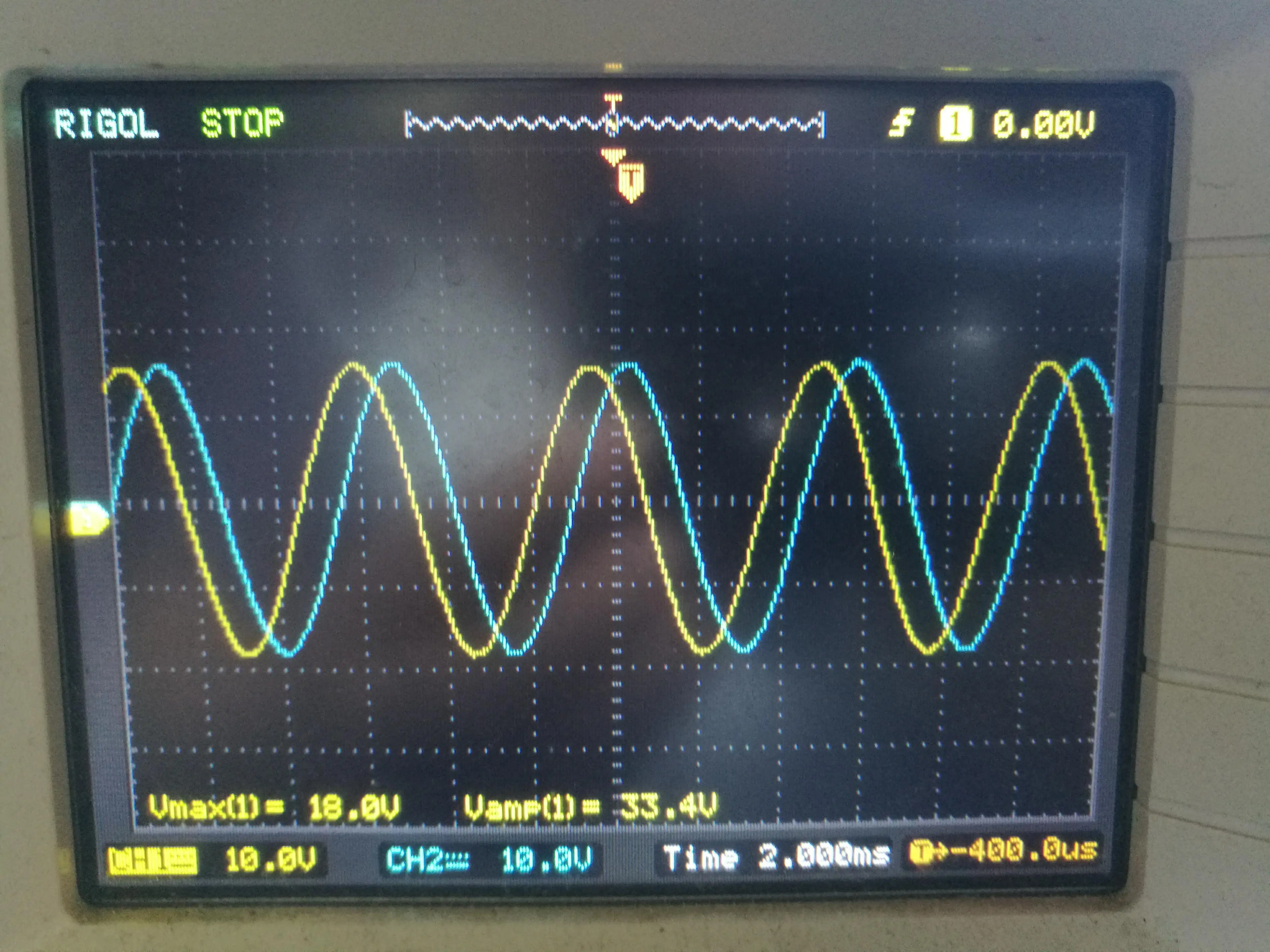
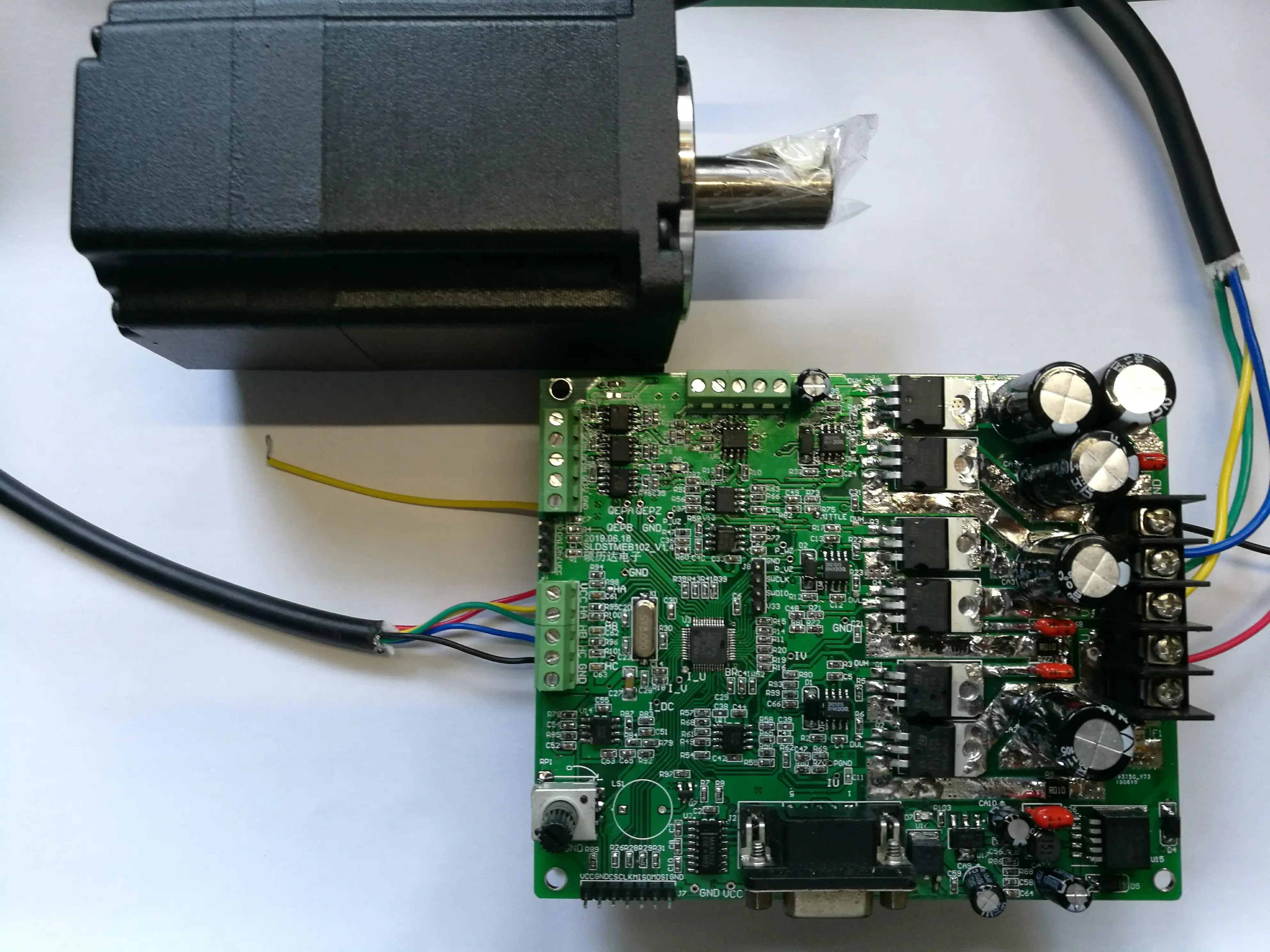
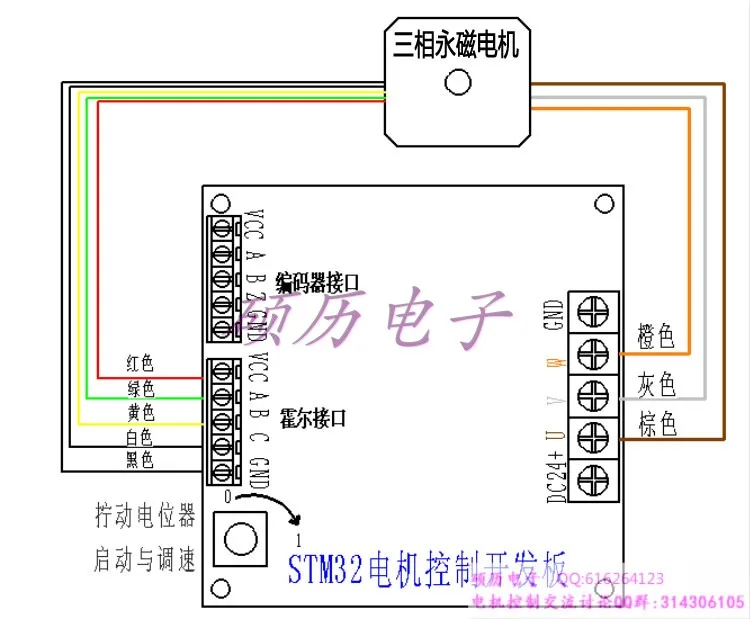
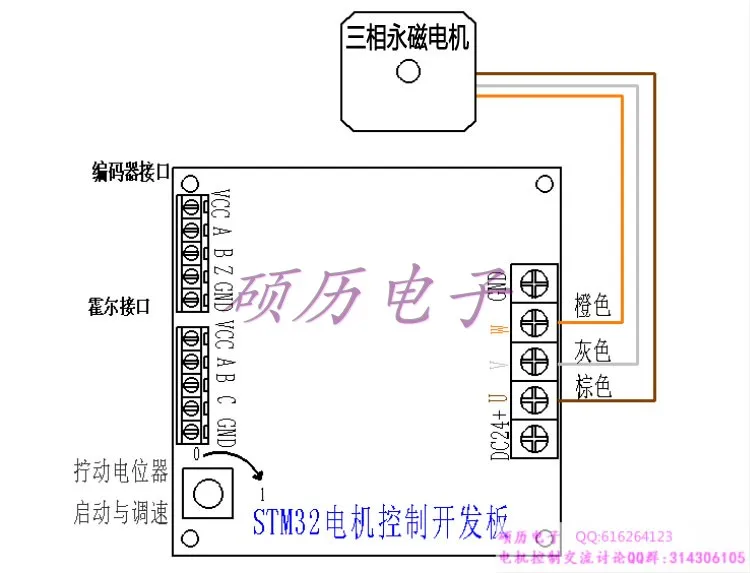
Схема проводки: жгут проводов Холла: красный, желтый, зеленый, синий и черный являются VCC HA HB HC GND
Фазовые линии двигателя: желтый, зеленый и синий (толстые линии) являются U, V и W, соответственно
4. Энкодер параметры
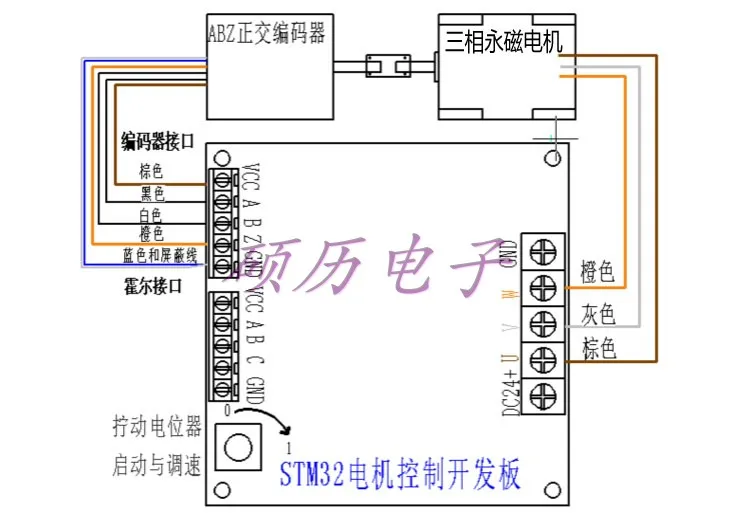
1000-line ABZ Ортогональный энкодер:
1) напряжение источника питания: 5-12 В
2) Потребляемая мощность: менее 20 мА
5. Чип управления STM32F103
1) 64 k вспышка
2) LQFP48
3) источника питания Напряжение: 3,3 v
6.MOSFET gate drive принимает IR2101S,MOSFET STP80N70;
7. Со скоростью PID внешняя петля, внутренняя петля тока, двойная замкнутая петля управления
8. С последовательным интерфейсом связи RS232, удобно тестировать с оборудованием или компьютером
9. Поддержка может поддерживать связь, отлаживать и использовать некоторых клиентов и использовать соответствующие методы связи.
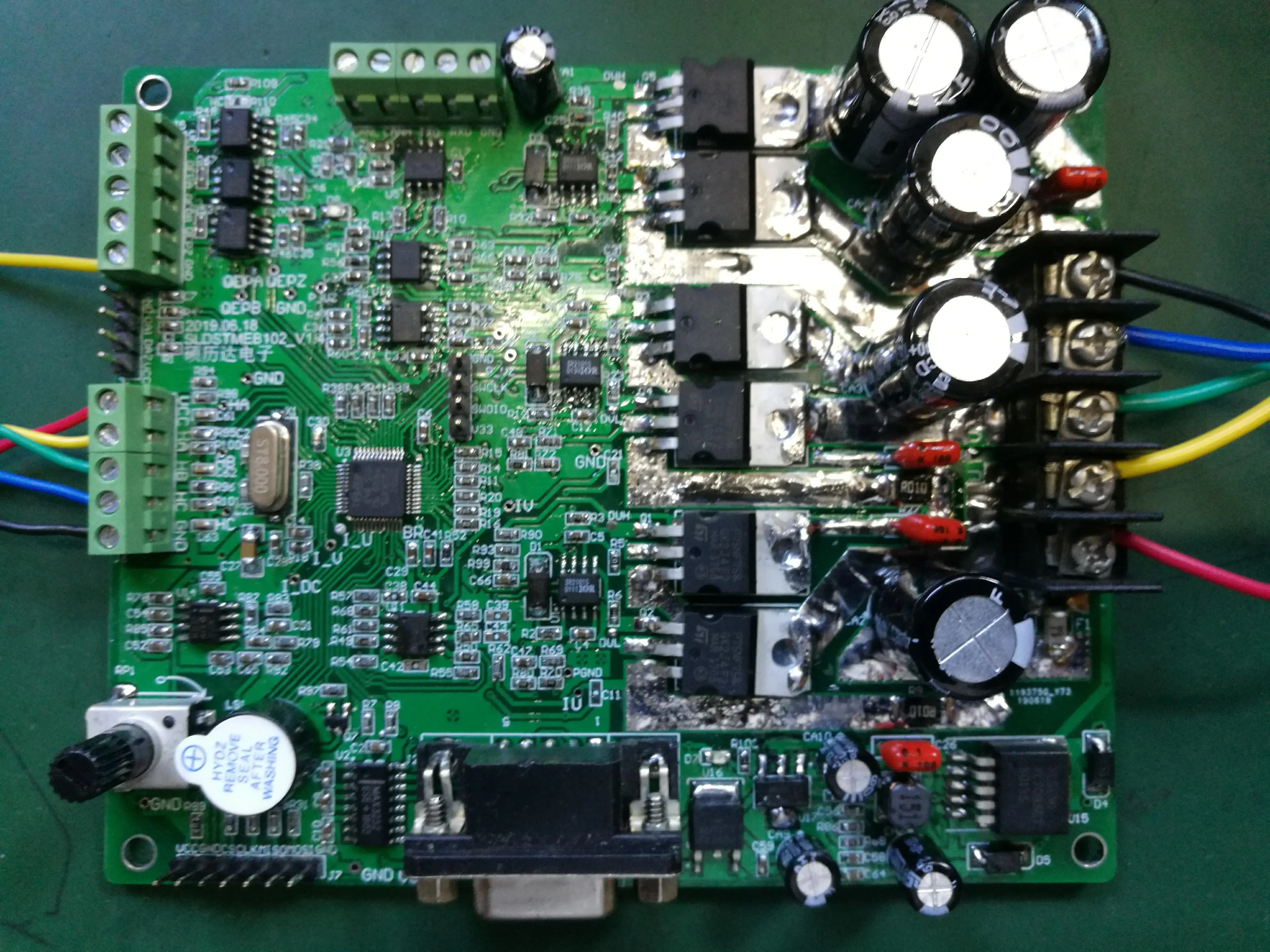
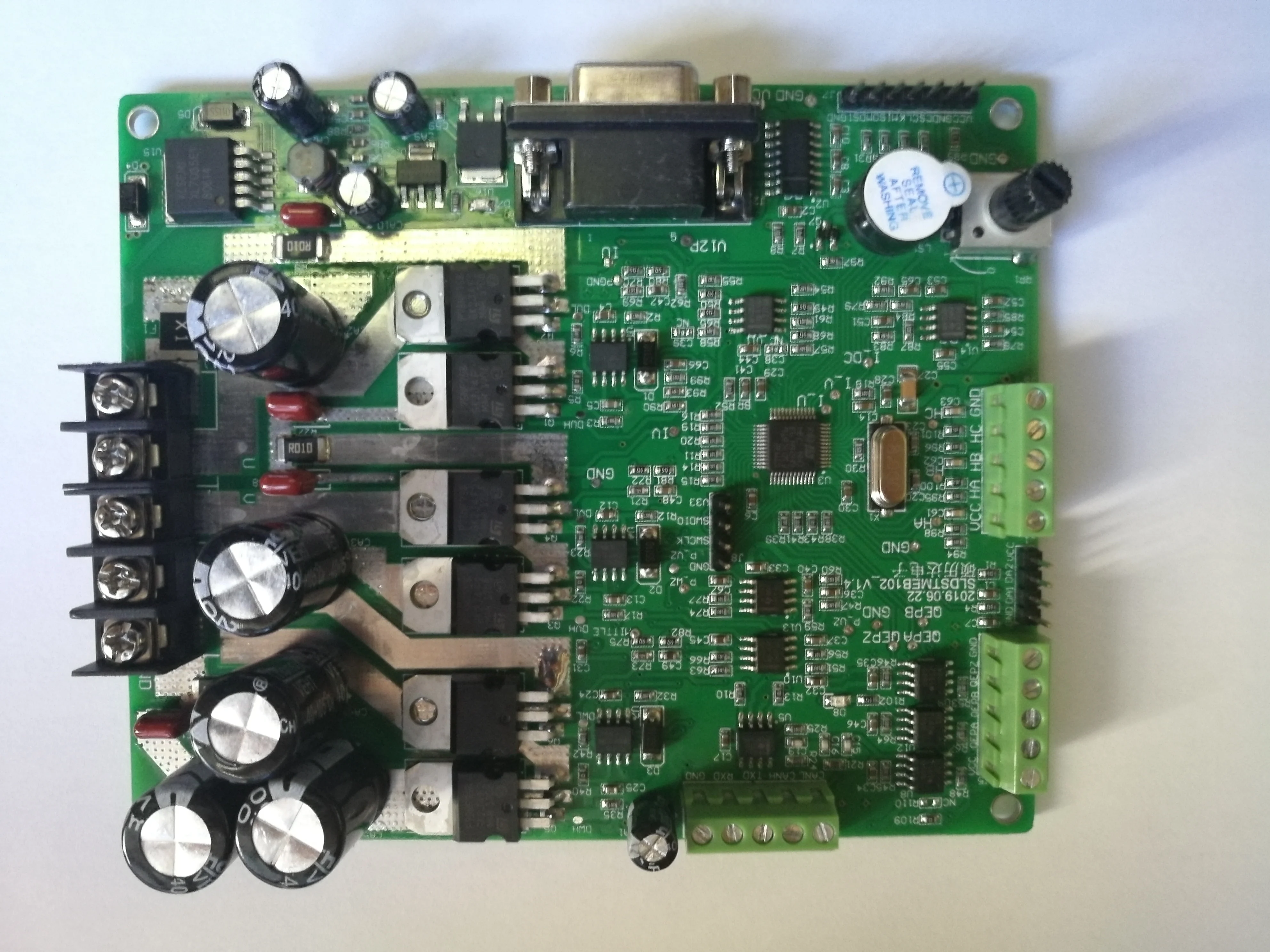
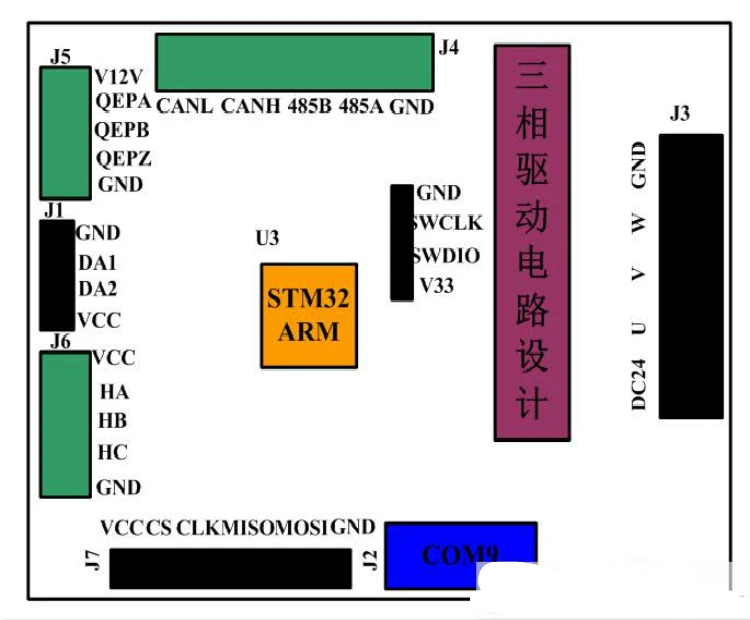
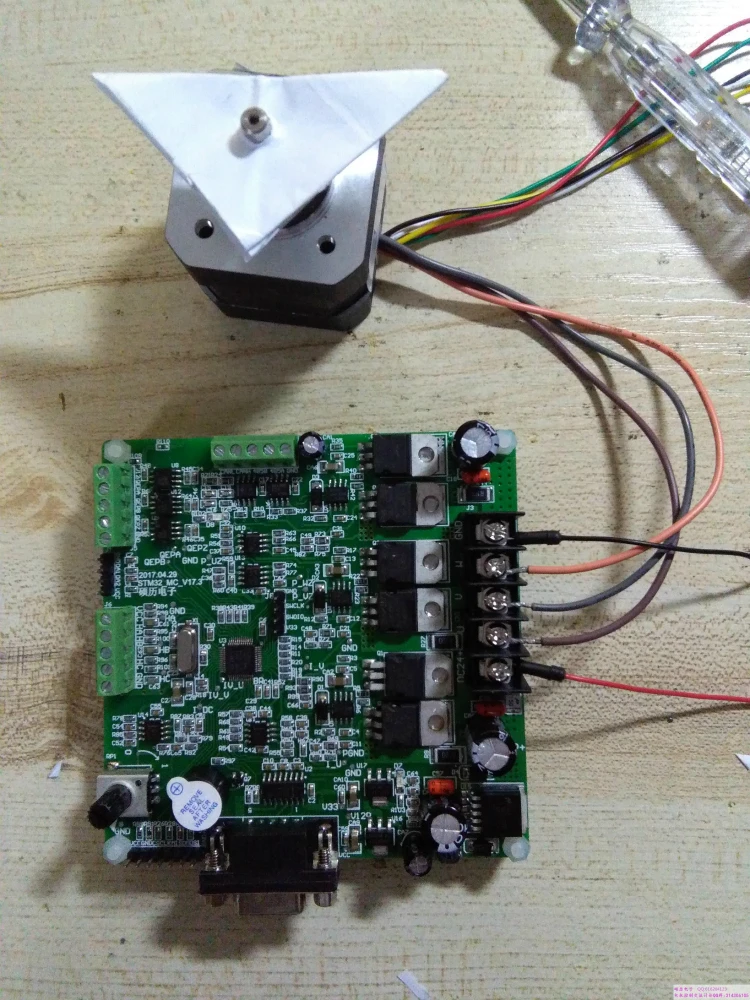
10. Схема блока управления и определение интерфейса
Система диаграммы
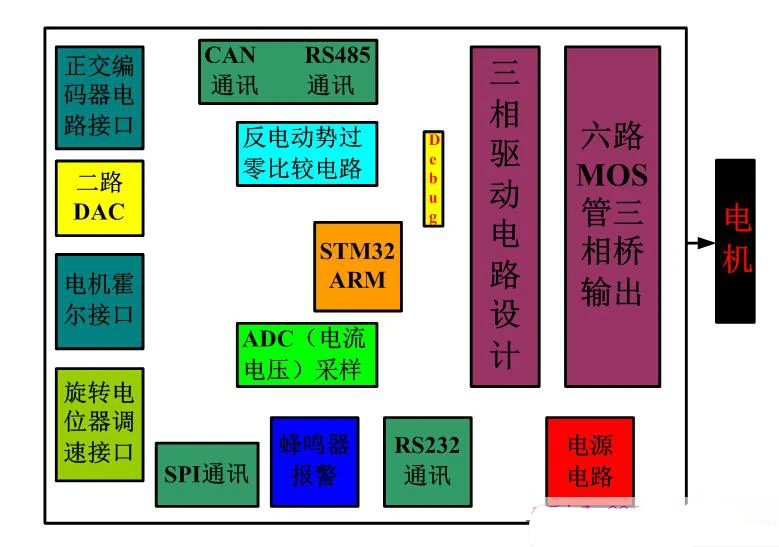
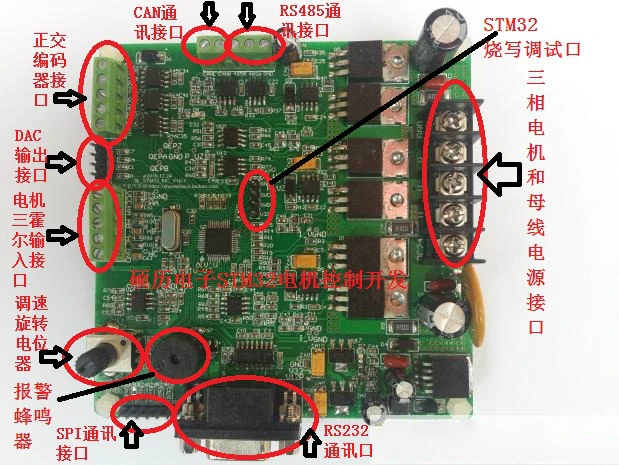
Интерфейс определение схема
Физическая схема
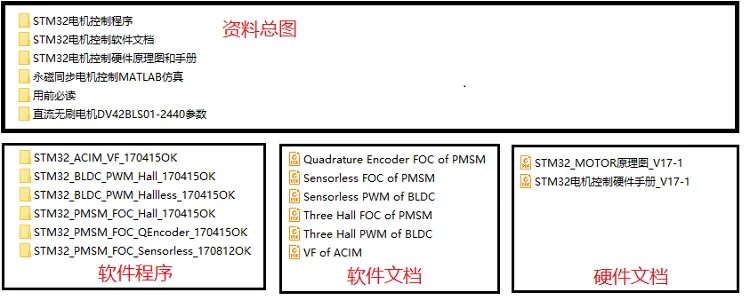
11. Экспериментальная содержание обучения
1) dc бесщеточный Датчик Холла квадратная волновая скорость, ток, двойной замкнутый цикл PID контроль эксперимента
Скачать обычные: STM32_BLDC_PWM_Hall
Проводка режим:
2) бесщеточный Бессенсорный квадрат скорости волны постоянного тока, ток, двойной алгоритм управления PID замкнутым циклом
Эксперимент
Скачать обычные: STM32_BLDC_PWM_Hallless
Проводка режим:
3) синхронный двигатель с постоянным магнитом ABZ Ортогональный энкодер FOC, SVPWM, скорость, ток, двойная замкнутая петля PID контроль, режим загрузки: STM32_PMSM_FOC_QEncoder
Проводка режим:
Примечание: добавлена функция автоматического нулевого распознавания соединительного вала между ортогональным кодировщиком и двигателем
\
4) синхронный Датчик Холла постоянного магнита FOC, SVPWM, скорость, ток, двойной замкнутый цикл PID контроль экспериментов
Скачать обычные: STM32_PMSM_FOC_Hall
Проводка режим:
\
Тестовый фазовый ток (DAC waveform) вручную с соответствующей нагрузкой во время работы двигателя
Пробоотборный токовый сигнал сопротивления PWM
\
5) Без зондирования FOC, SVPWM, скорости, тока и двойного замкнутого цикла PID контроль экспериментов с синхронизацией постоянных магнитов
Скачать обычные: STM32_PMSM_FOC_Sensorless
Проводка режим:
6) асинхронный эксперимент управления VF переменного тока
В этом эксперименте асинхронный двигатель переменного тока заменяется бесщеточным двигателем постоянного тока. Алгоритм управления точно такой же.
Скачать обычные: STM32_ACIM_VF
Проводка режим:
\
Примечание: код, прикрепленный к различным моторным упаковкам, отличается (отсутствие кодового кода PMSM и т. д.)
\
В комплект поставки входит Трехфазная посылка с постоянным магнитом 60 Вт:
\
\
В комплект поставки входит Трехфазная посылка с постоянным магнитом мощностью 100 Вт:

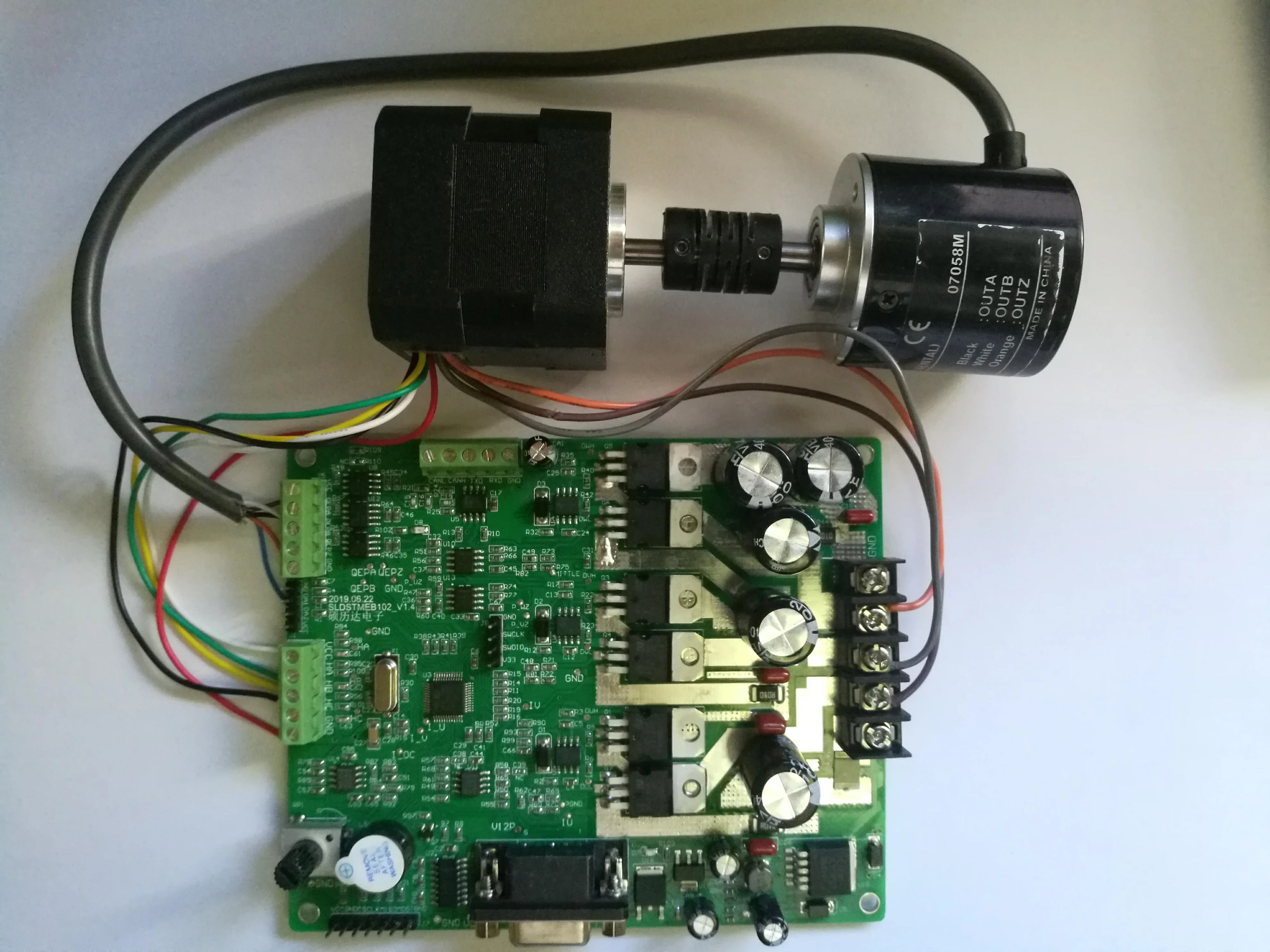
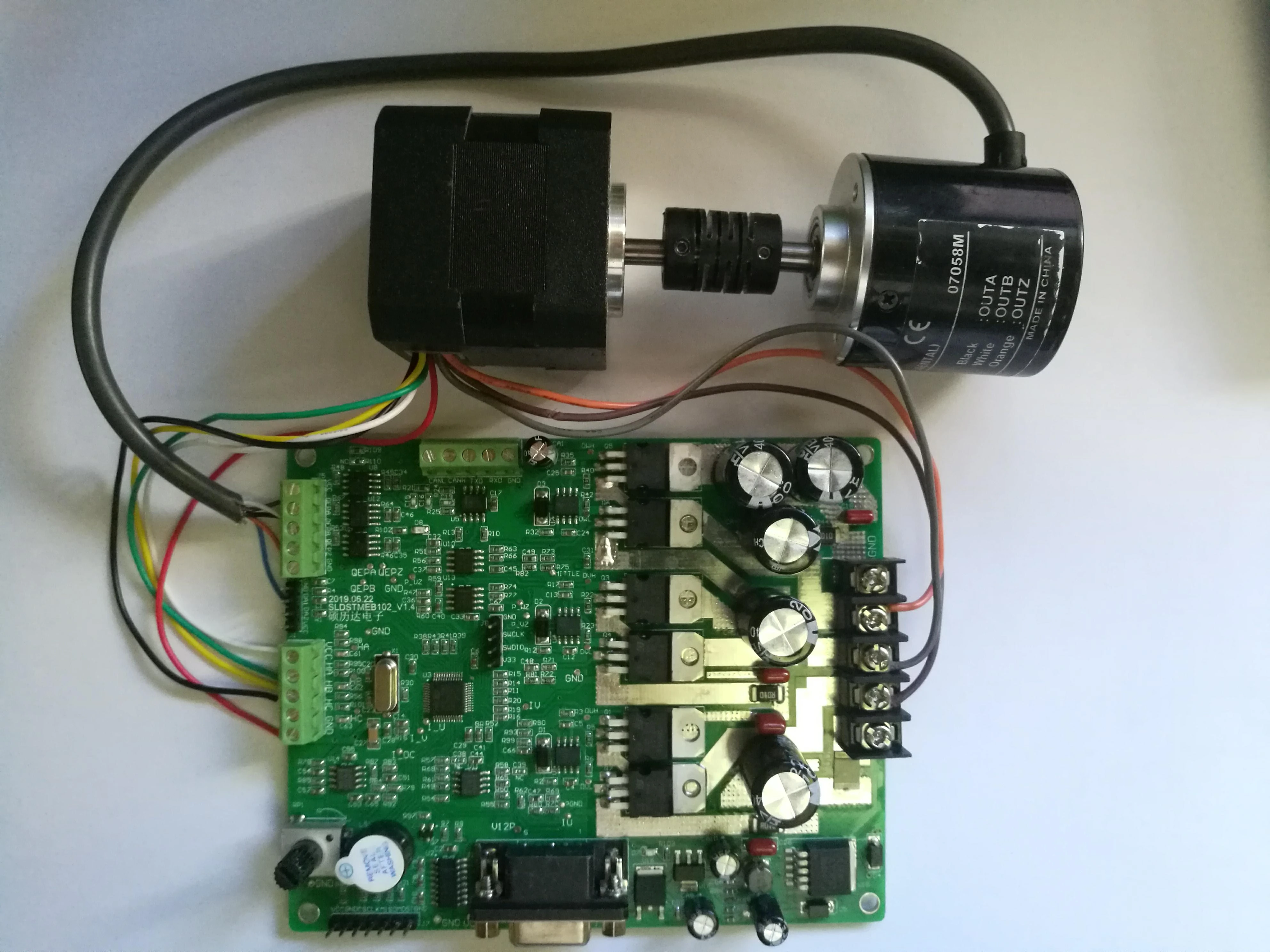
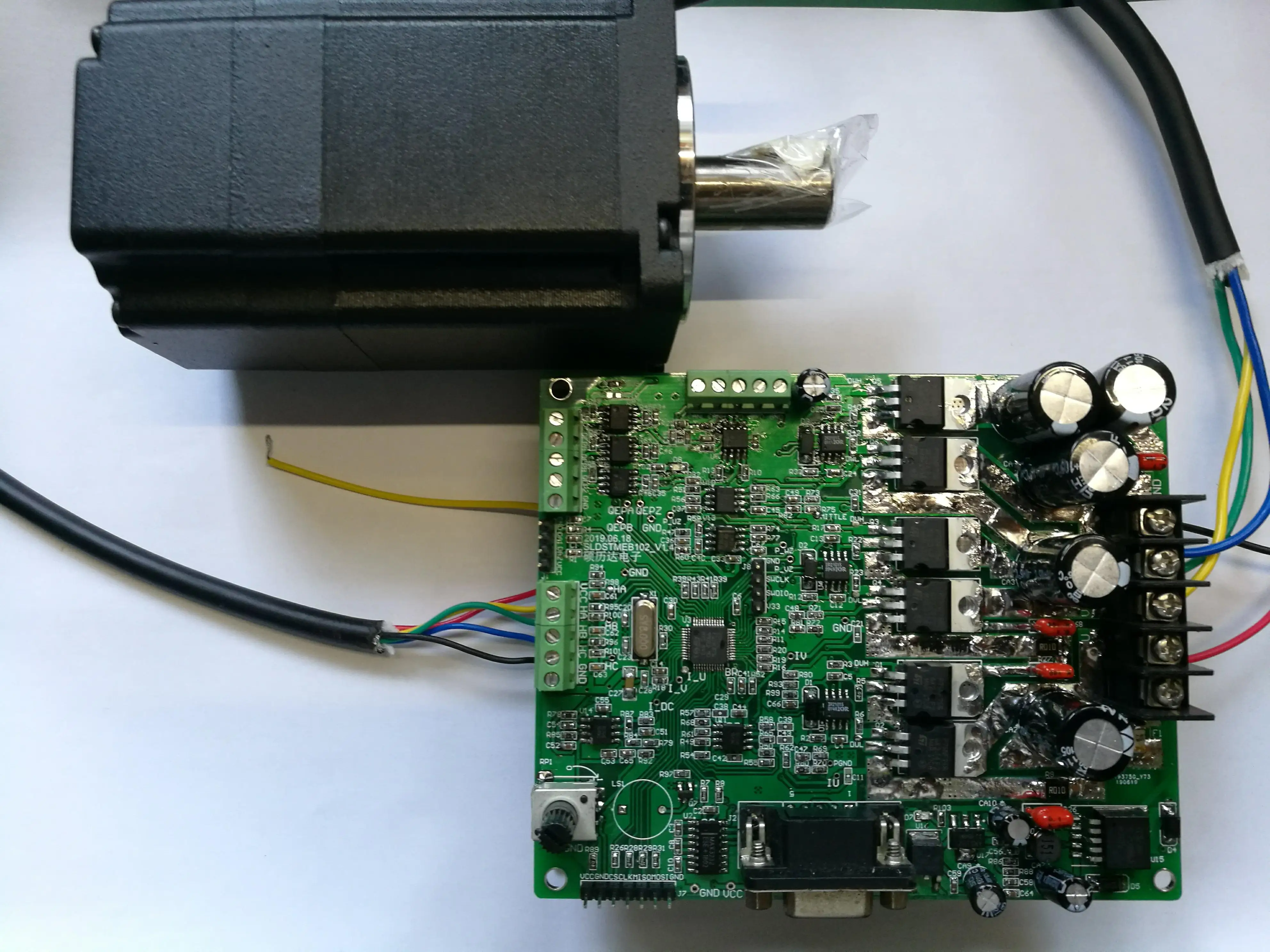
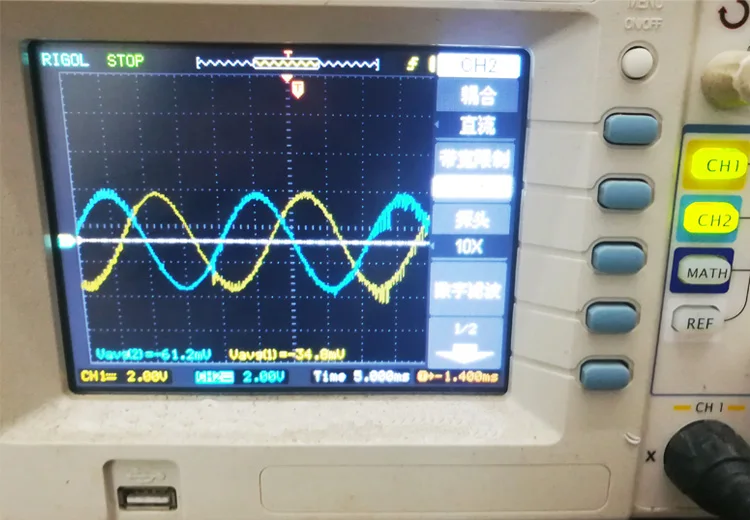
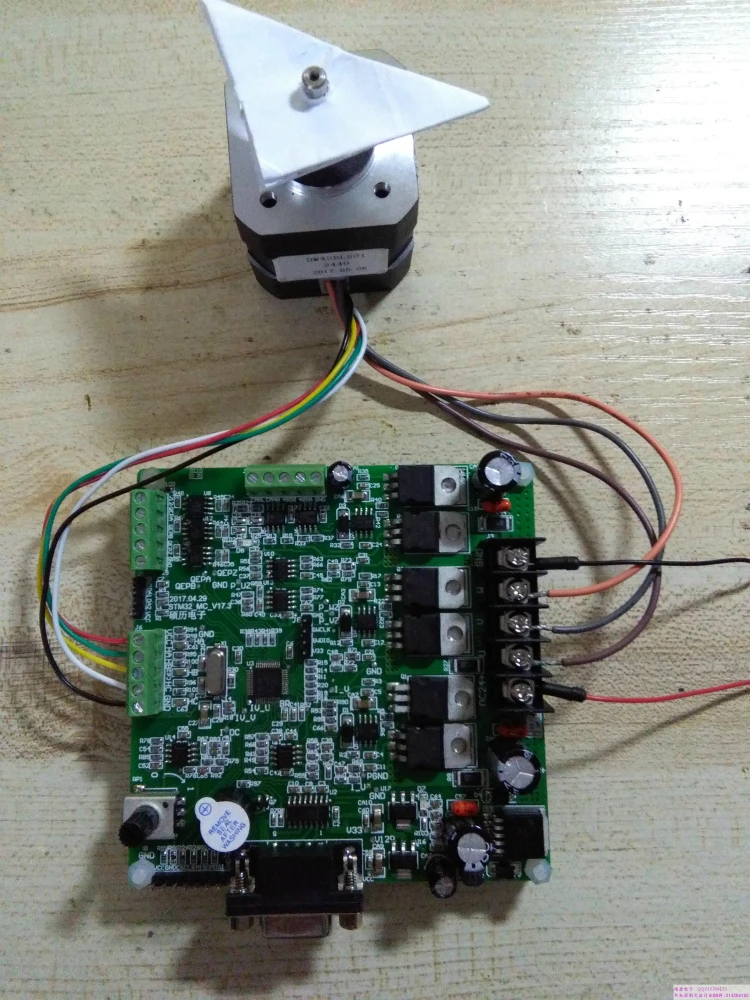
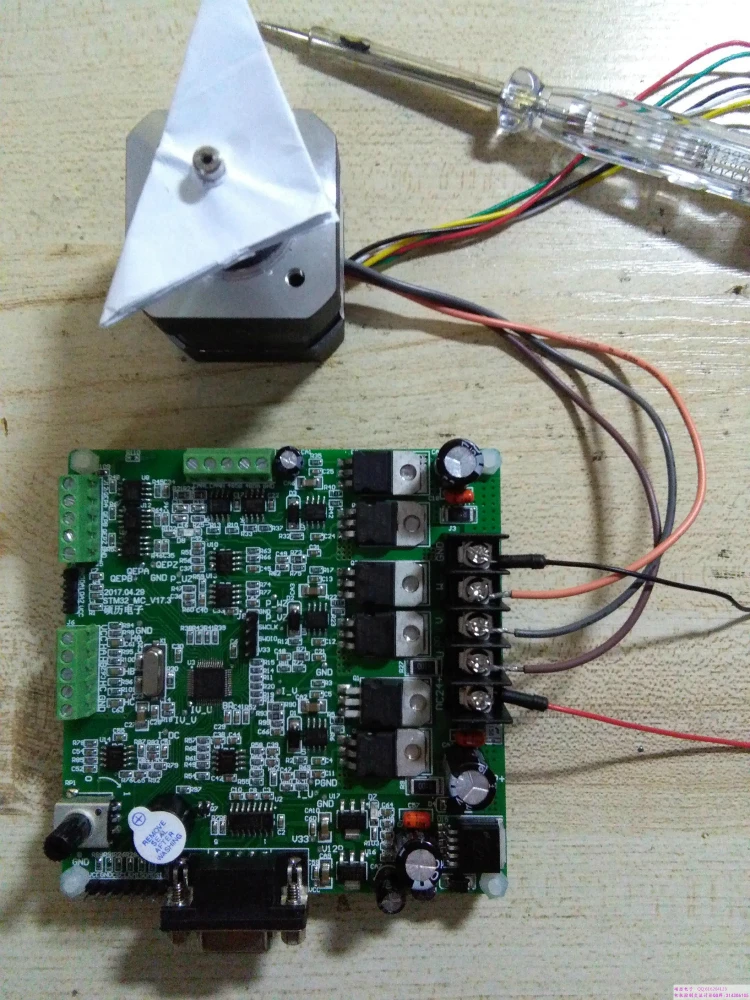
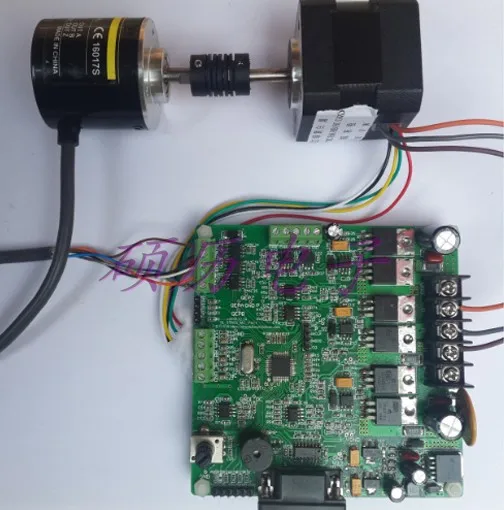
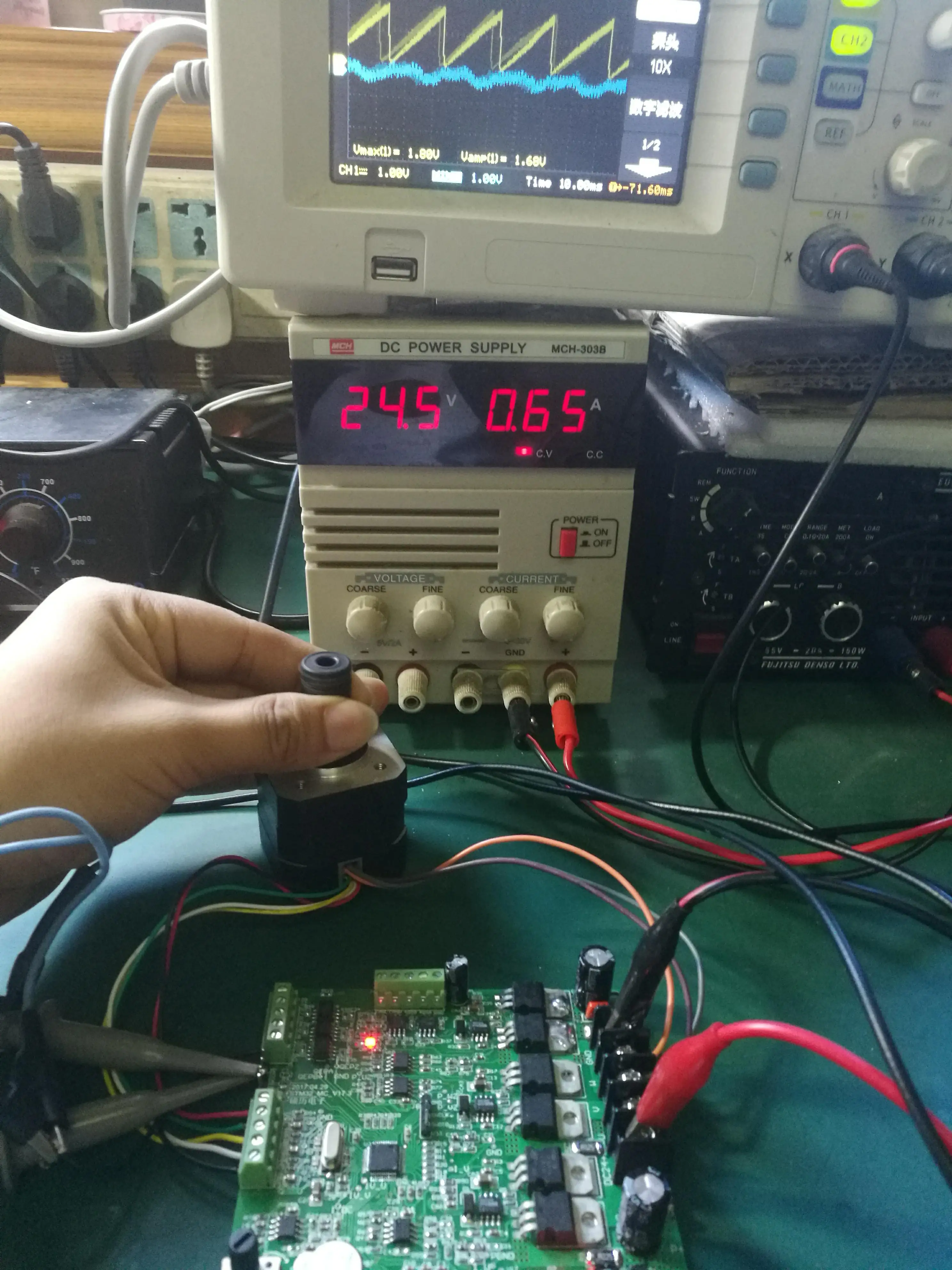
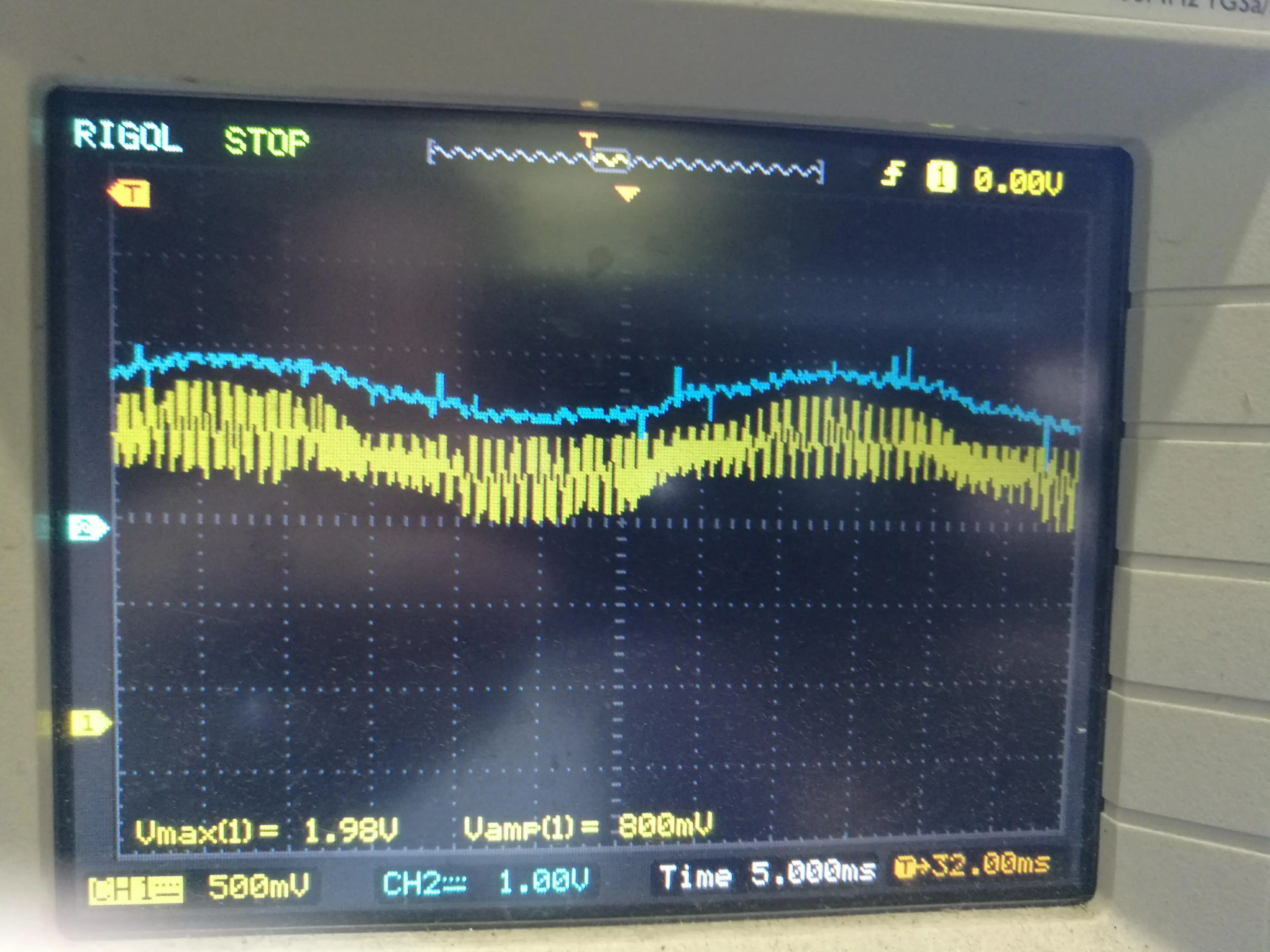
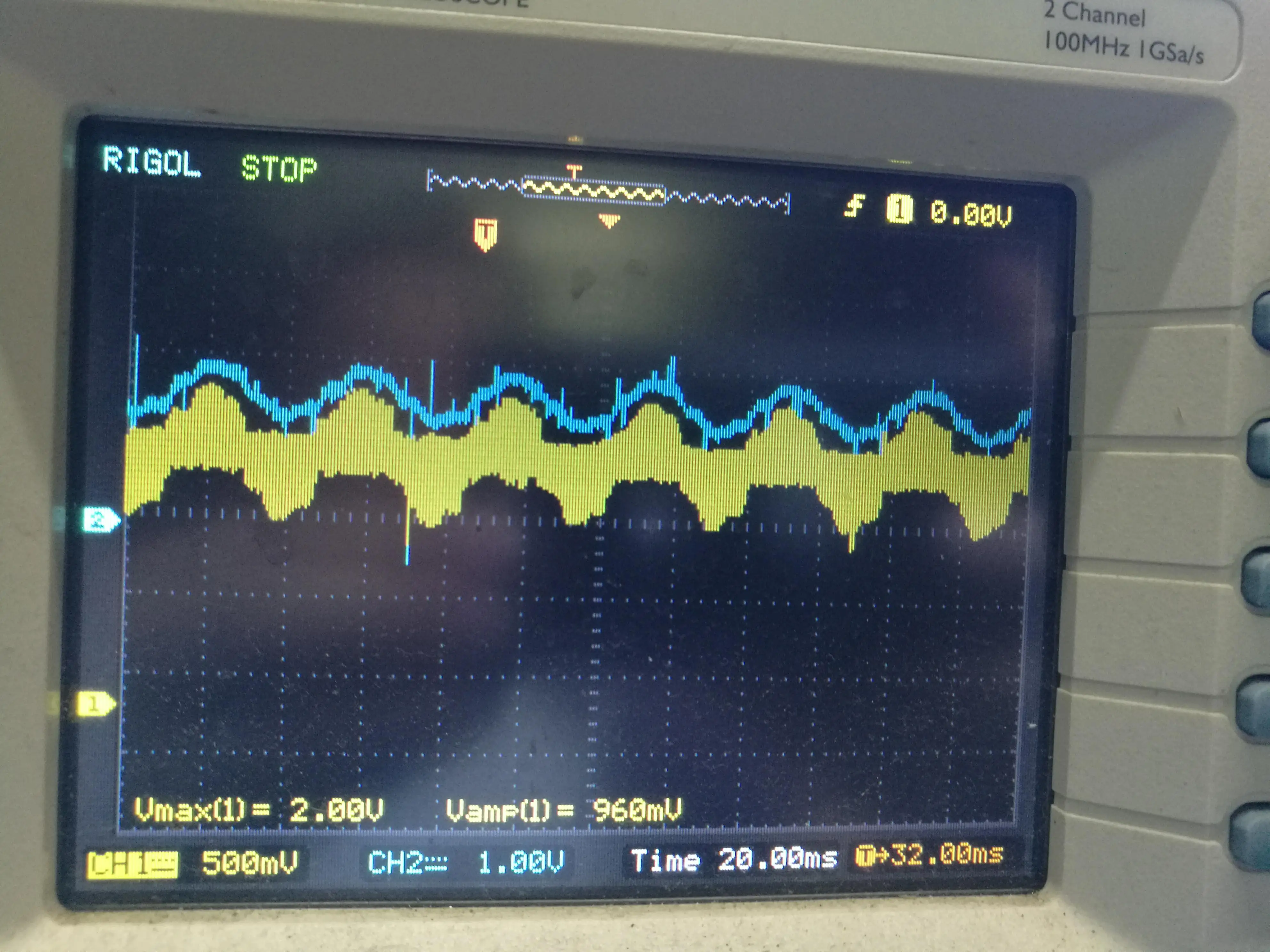
Статор и ротор трехфазного постоянного магнита двигателя в этой посылка специально разработаны, и обратная электродвижущая сила является синусоидальной волной. Как показано на рис. 1, 2 и 3 ниже, левая сторона-это активный двигатель, управляемый приводной пластиной, а правая сторона-двигатель под испытанием (пассивный двигатель) соединен муфтой. Сигнал обратной электродвижущей силы u-phase и w-phase был измерен, когда скорость двигателя была около 800 об/мин.
Рис. 1. Синусоидальная волна задней электродвижущей силы трехфазного постоянного магнита двигателя
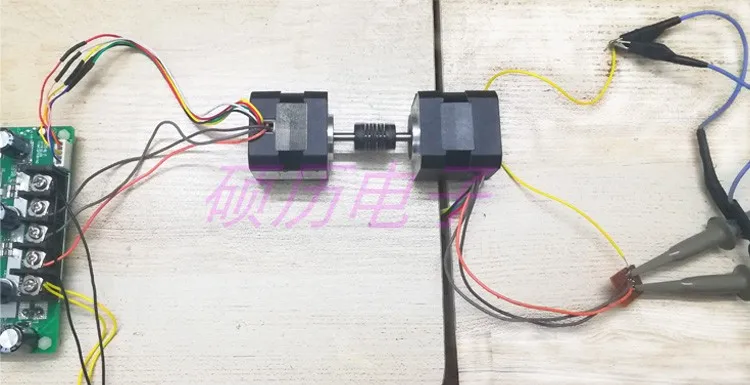
Рис. 2. Схема проводки трехфазного постоянного магнита
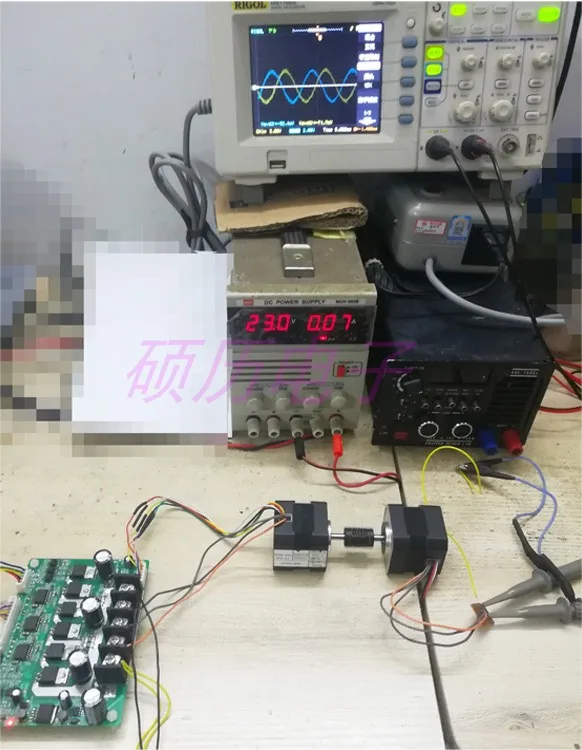
Рис. 3. Тестовая панорама трехфазного постоянного магнита двигателя