

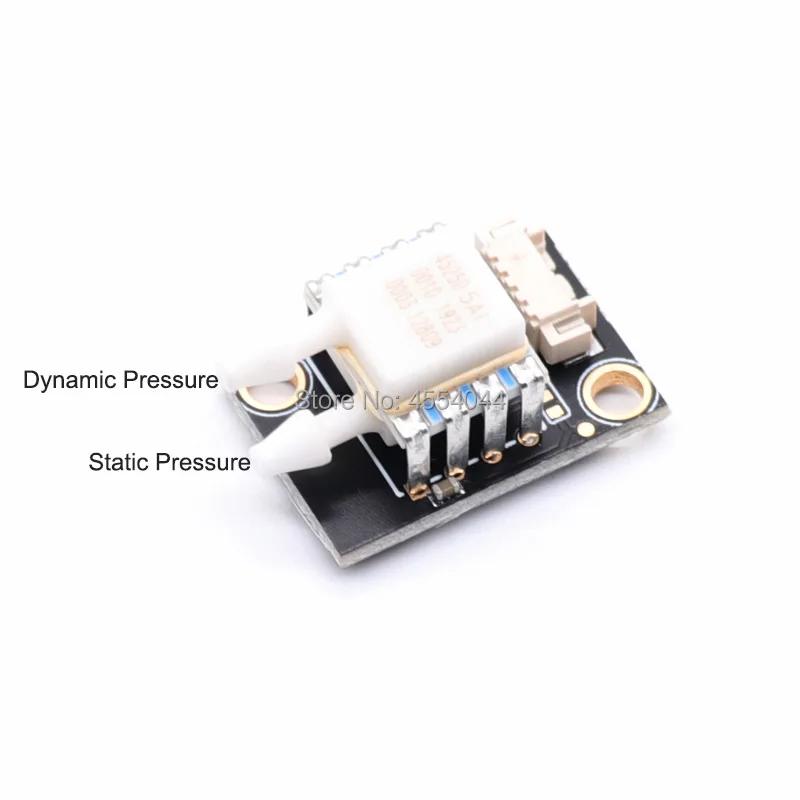









Датчик скорости полета Pitotbuis + PX4 дифференцированный датчик скорости полета для Pixhawk PX4 Vlucht Controller 
Angeltoy Store - Надежность 96%
Более 289 подписчиков, дата открытия магазина 11.10.2018
- Положительные оценки: 96% (208)
- Соответствие описанию: 96%
- Отвечает на сообщения: 96%
- Скорость отправки: 96%
Последнее обновление: 14.09.2024
Этот датчик скорости полета используется для контроллера полета PIXHAWK, а не APM.






 Описание калибровки счетчика скорости полета:Http://plane.ardupilot.com/wiki/calibrating-an-airspeed-sensor/
Описание калибровки счетчика скорости полета:Http://plane.ardupilot.com/wiki/calibrating-an-airspeed-sensor/

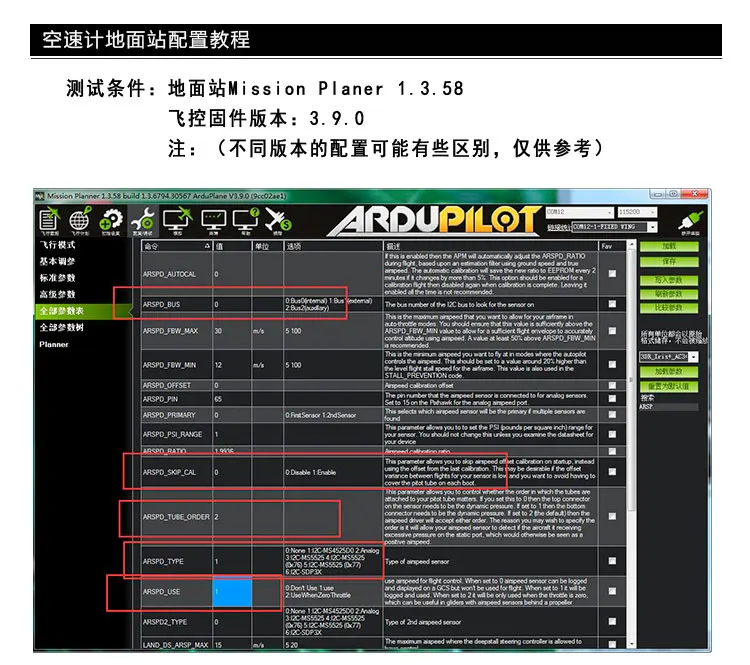
ARSPD_BUS установлен как 0, Используйте внутренний I2C
Arspd _ шкив _ CAL устанавливается как 0, при каждом перезапуске контроллера полета необходимо калибровать смещение счетчика скорости полета. Установите на 1, автоматически пропустите калибровку смещения датчик скорости полета, используя последнее калиброванное смещение
ARSPD_TUBE_ORDER set as 2, автоматическое соответствие верхней или нижней трубки динамическому давлению
Набор ARSPD_TYPE как 1, используйте I2C-MS4525D0
В интерфейсе отладки наземной станции наблюдайте за изменением измерителя скорости полета. Общий скачок значения составляет 1-3 в нормальном диапазоне. Продуйте воздух до счетчика скорости. Если значение скорости полета увеличивается, то счетчик скорости полета работает нормально.


Также вы можете откалибровать скорость в воздухе, если значение скорости в воздухе не является нормальным.