









Rtelligent 2 3 фазы Nema 23 24 NT60 RS485 Драйвер шагового двигателя через RS485 сеть Modbus RTU для открытого цикла и замкнутого цикла двигателя 
Последнее обновление: 28.09.2024
 Руководство пользователя:
Руководство пользователя:Программное обеспечение:
Https://drive.google.com/file/d/1pBmd_SefoOcnhQ7D-EoR2GFpuRpGWPDA/view?usp=sharing
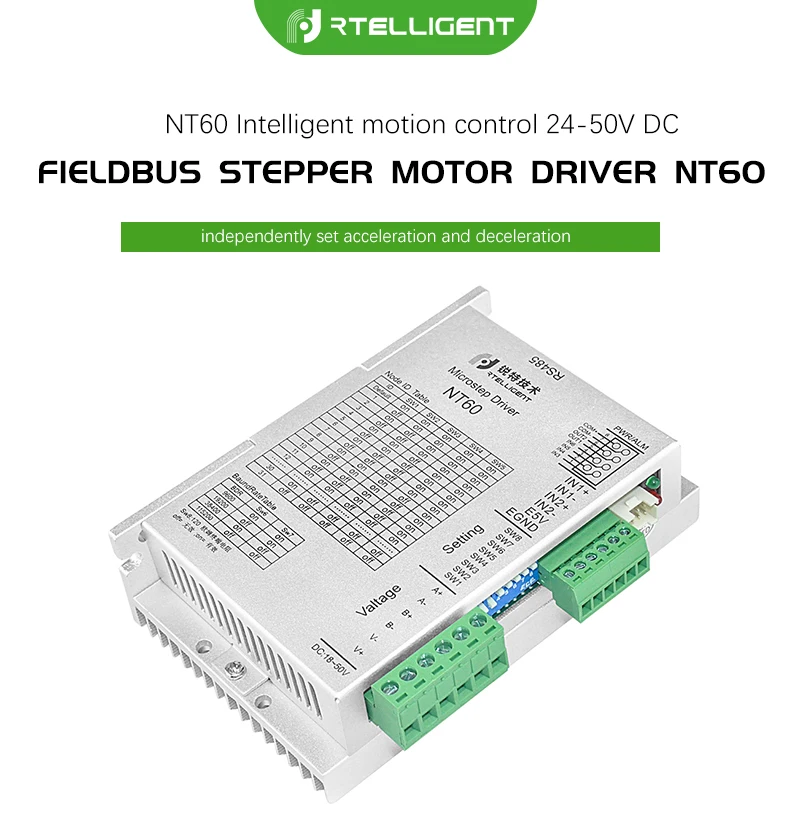
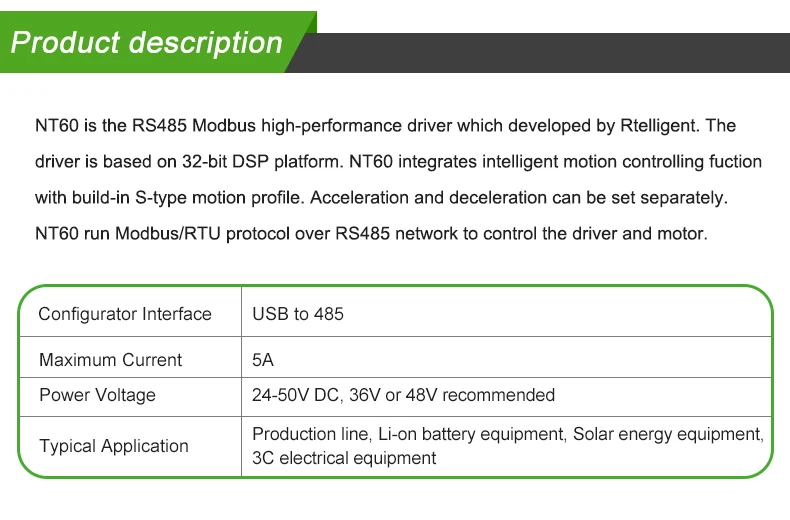
1,1 информация о продуктеNT60-это высокопроизводительный Драйвер шагового двигателя, управляемый шиной, который интегрирует интеллектуальную функцию контроллера движения со встроенными в s-образные команды ускорения/замедления для самостоятельной установки ускорения и замедления. Управление приводом и двигателем в режиме реального времени с помощью протокола Modbus по сети RS485.
1.1.1 ОсобенностиПрограммируемый шаговый двигатель небольшого размера
Рабочее напряжение DC: 24 ~ 50 в
Режим управления: Modbus/RTU
Способ связи: RS485
Максимальный выходной ток Фазы: 5А/фаза (синусоидальный пик)
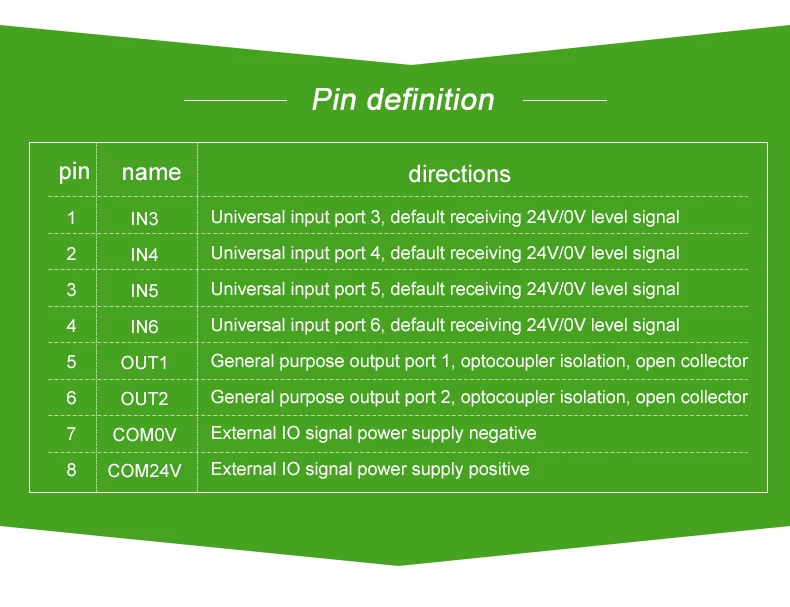
Цифровой порт ввода-вывода:
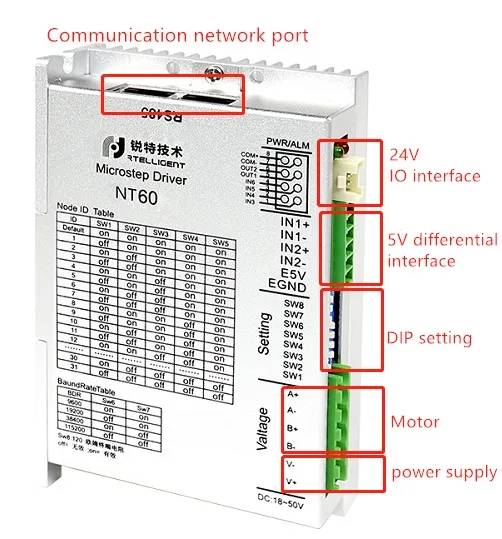
6-канальный оптически изолированный цифровой Входной сигнал: IN1, IN2 5V дифференциальные входы, также может быть подключен к 5V одиночный вход; IN3 ~ IN6 составляет 24В одиночный вход переменного тока, общий анод соединение
2 канала оптически изолированного выхода цифрового сигнала, максимальное Выдерживаемое Напряжение 30 в, максимальное погружение или вытягивание тока 100 мА, общее соединение катода.
Источник питания: V + подключен к положительной полюсе источника питания постоянного тока, а V-подключен к отрицательной полюсе источника питания постоянного тока. Диапазон входного напряжения составляет DC18 ~ 50 В.
Мотор: Драйвер соответствует двухфазному шаговому мотору по умолчанию, Пожалуйста, подключите красный, синий, зеленый и черный к A +, A-, B +, B-
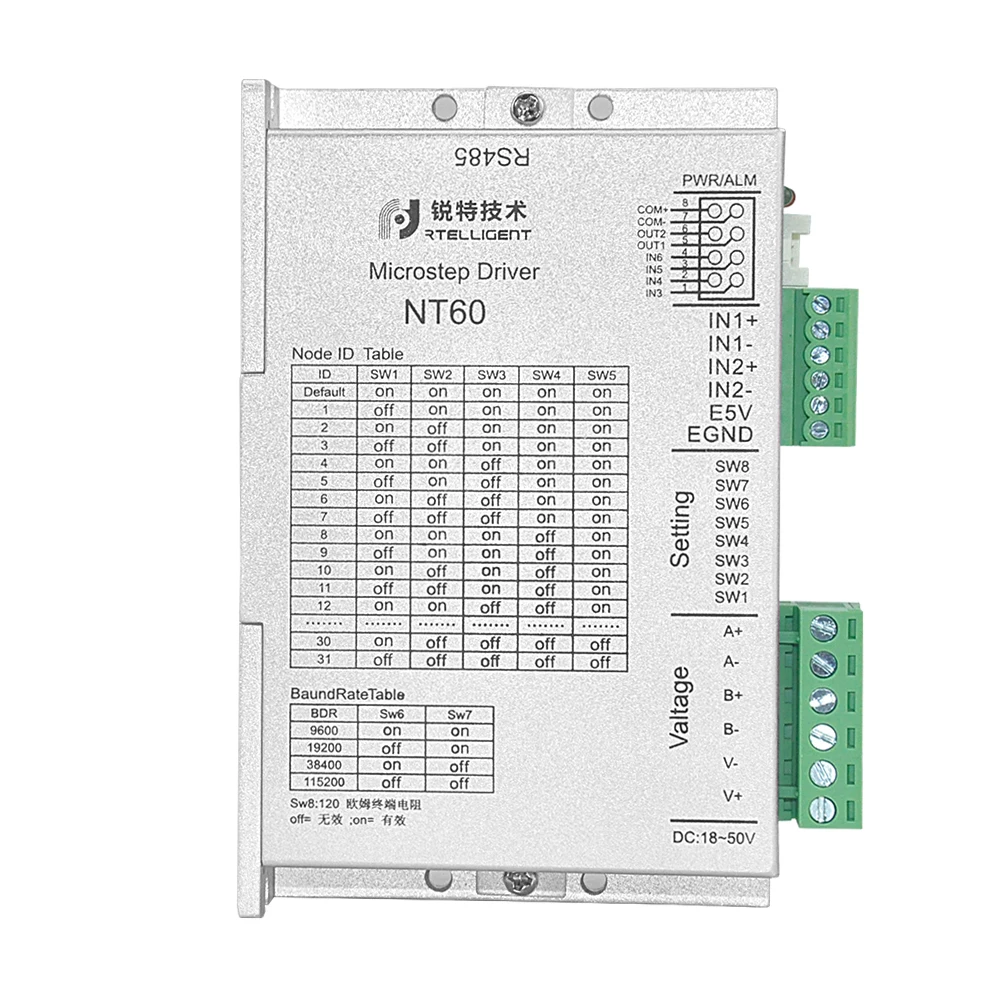
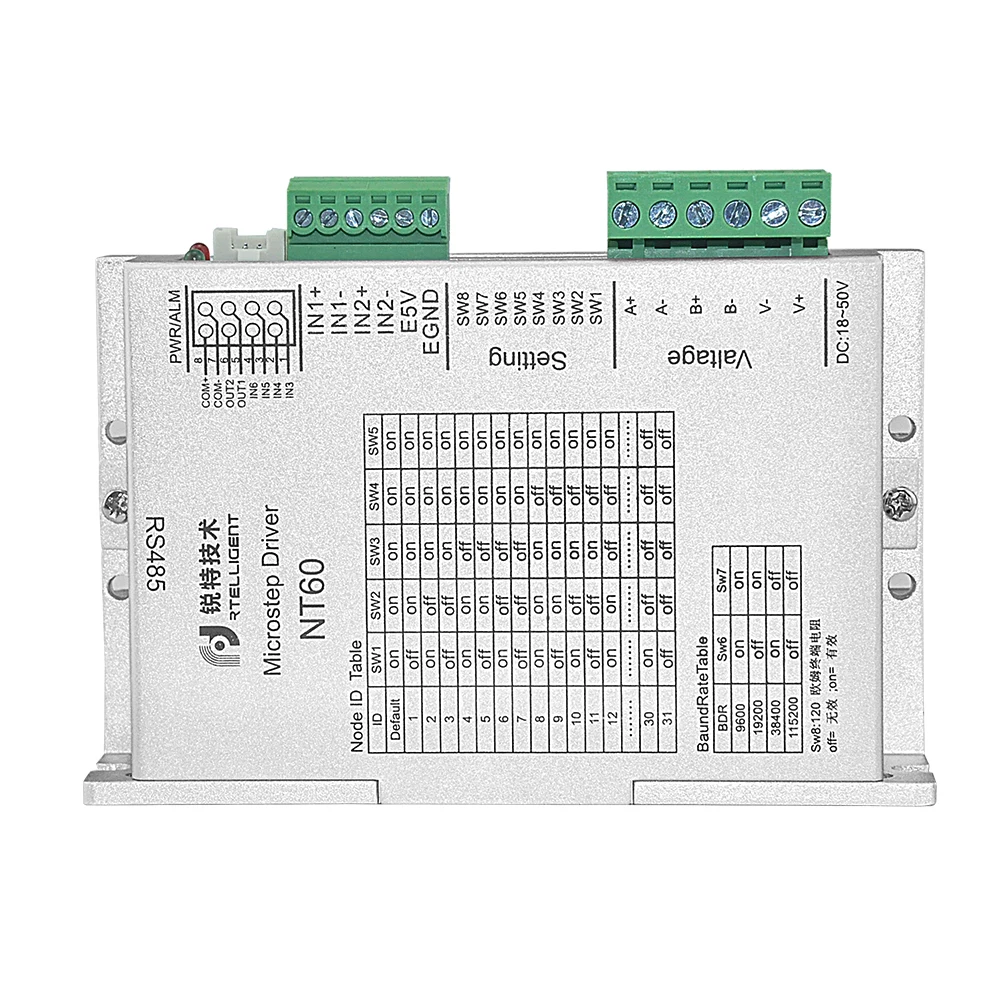
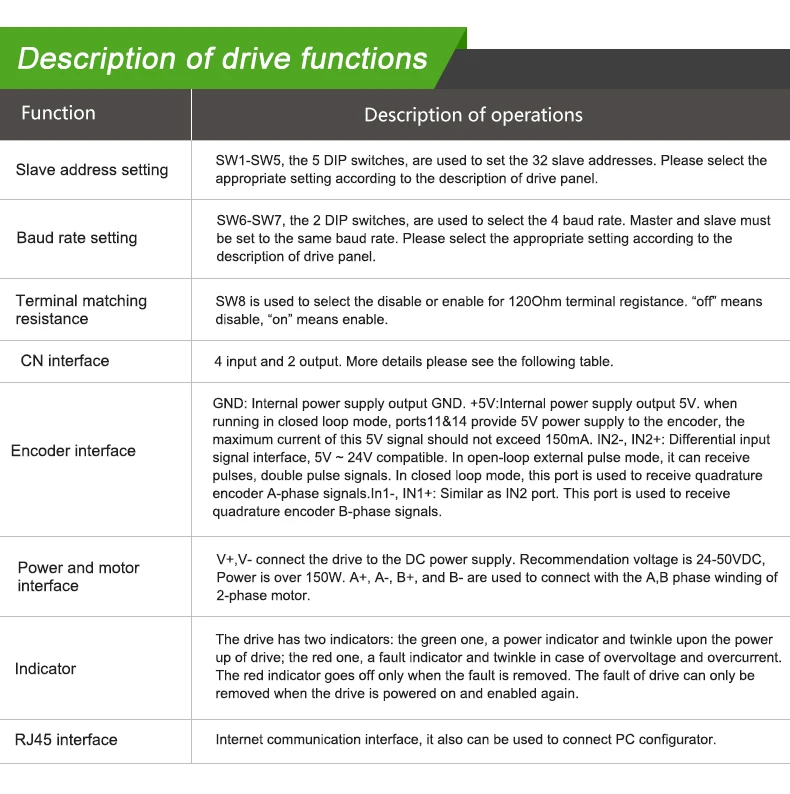
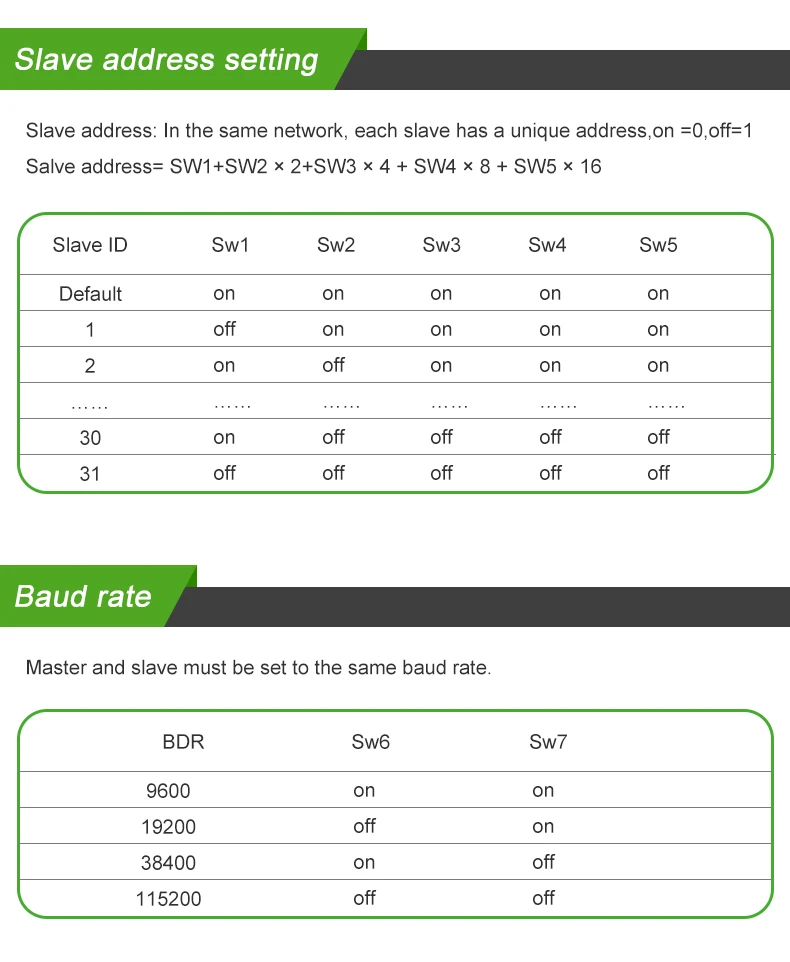
Настройка DIP: SW1, SW2, SW3, SW4, SW5 установить slave адрес, ON = 0, OFF = 1
Рабочий адрес = SW1 + SW2 × 2 + SW3 × 4 + SW4 × 8 + SW5 × 16
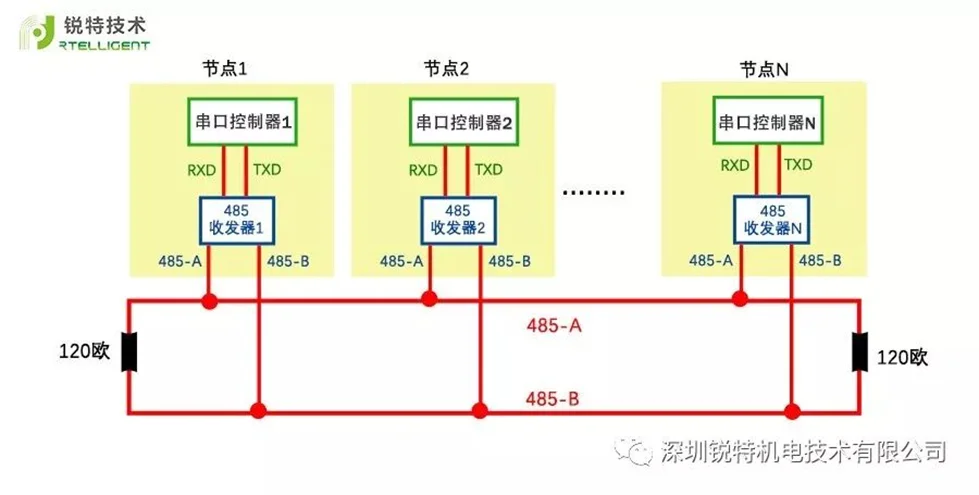
SW6, SW7 Установите скорость передачи данных (см. Таблицу трафаретной печати для получения подробной информации). SW8 является эффективным сопротивлением терминала, как правило, не набрать для связи на короткие расстояния.
Дифференциальный Интерфейс 5 В: Может использоваться в качестве кодировщика замкнутого контура и импульсного сигнала 5 В + направления (при использовании входа 24 В, пожалуйста, подключите резистор 2K для ограничения тока во внешней серии).
24 В интерфейс порта IO: этот порт имеет 4 канала всего 24 В вход, два канала всего 0 В выход, функция может быть выбрана в программное обеспечение для отладки.
 Сетевой порт связи: две группы интерфейсов RS485, которые могут быть подключены произвольно, определение интерфейса является следующим
Сетевой порт связи: две группы интерфейсов RS485, которые могут быть подключены произвольно, определение интерфейса является следующим2. Описание функции привода
Функциональный шаг шины Rtelligent интегрирует три режима управления: Импульсный + направление, IO, 485 связь. В том числе, ввода-вывода включает в себя скоростной режим запуска и остановки плюс направлении, скоростной режим переднего и заднего хода, 16-сегмент измеритель скорости, 16-сегмент позиции стол, фиксированной длины пробежки, нулевой возврат, лимит, аналоговый режим скорости (регулировка скорости потенциометра), аналоговое положение следующего режима и режим крутящего момента.
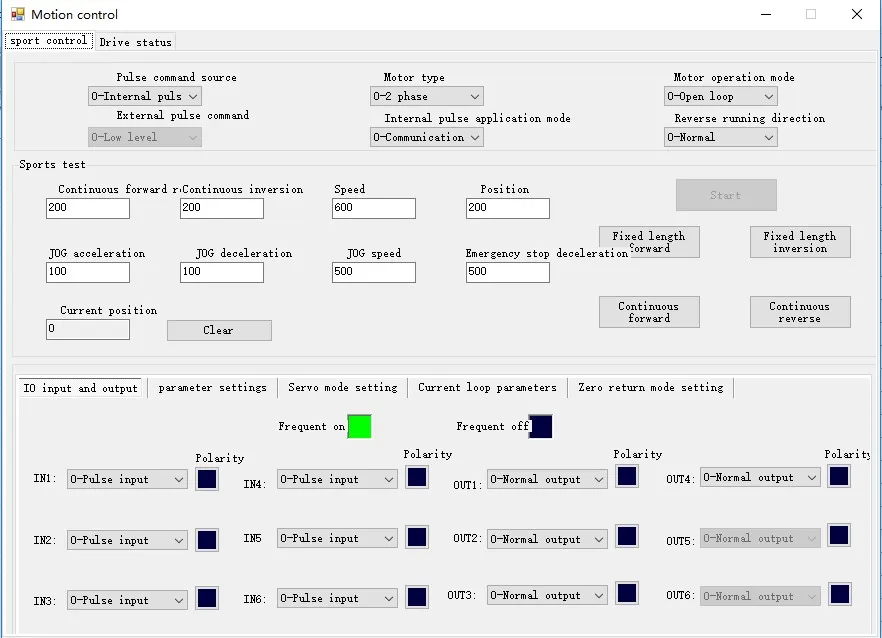
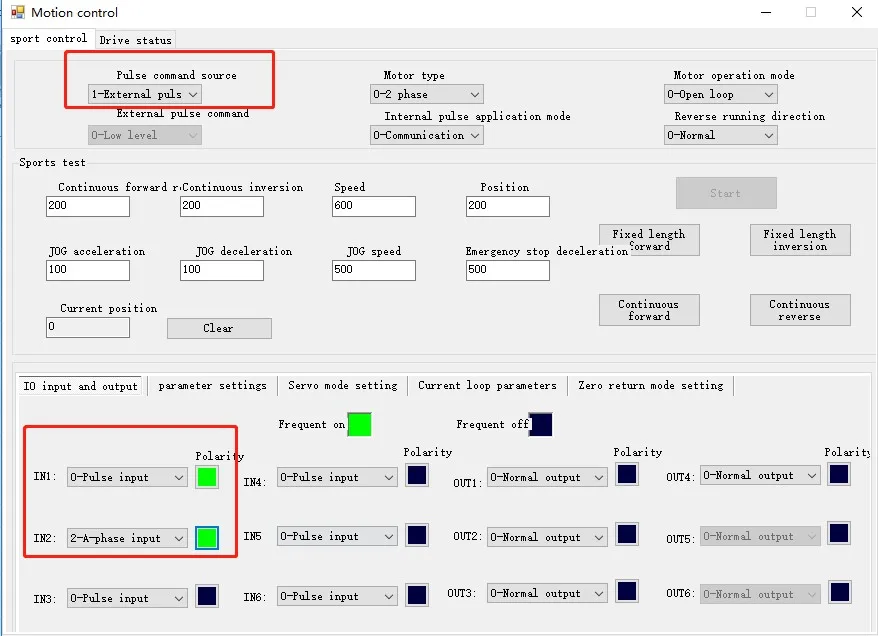
(1) Настройка параметров импульса + направления:
В 1, IN2 подключены к входу направления импульса, а IN3 и IN4 также могут быть настроены на направление импульса. Существует разница в проводке между двумя, первый подключен к сигналу 5 В, а последний подключен к сигналу 24 В.
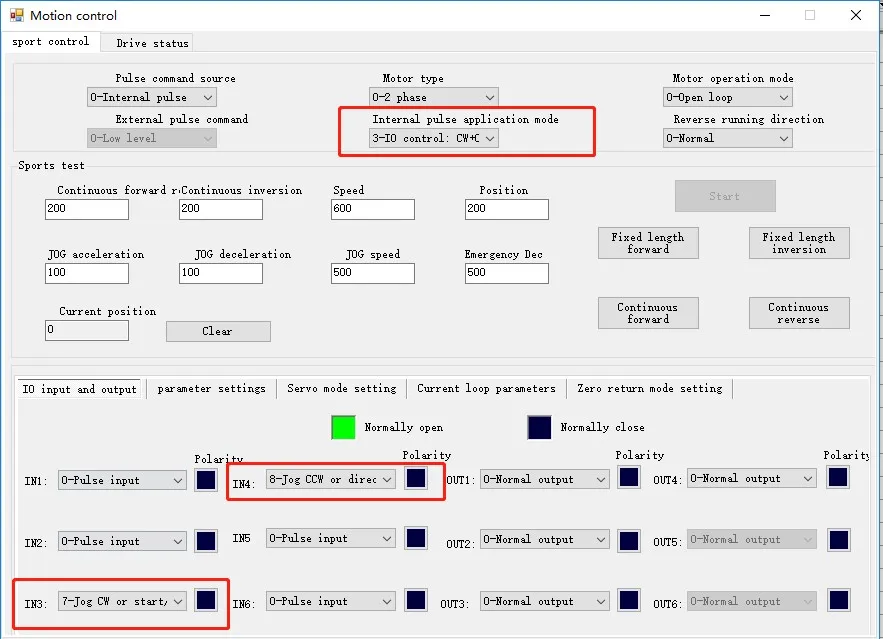
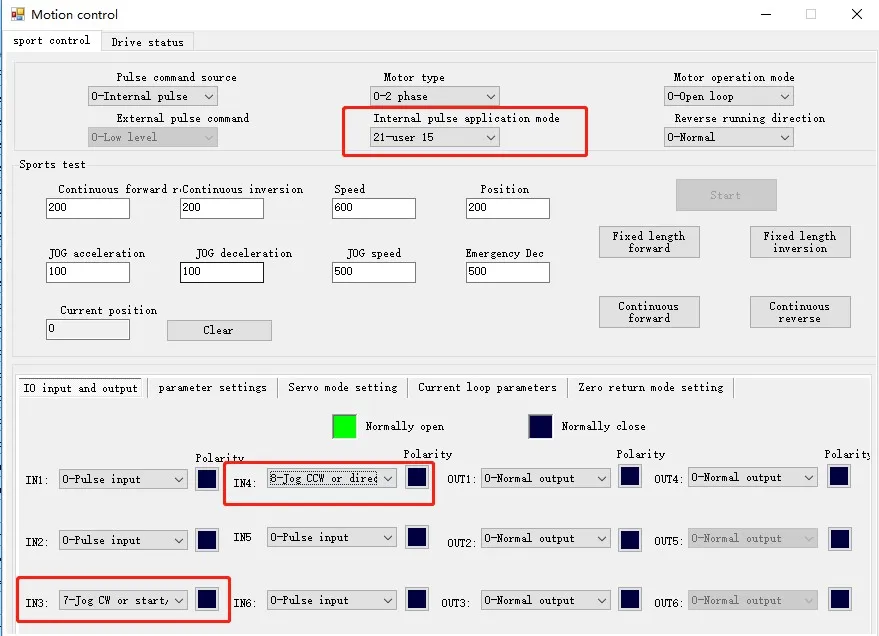
 (2) Настройка направления запуска и остановки режима скорости IO:Двигатель с сигналом уровня доступа IN3 начинает работать, а мотор с сигналом уровня доступа IN4 переключает направление работы. Параметры, связанные со скоростью, измеряются параметрами движения в программном обеспечении для отладки. Проводка COM + подключена к 24 положительным, IN3 и IN4 подключены к 0 В.
(2) Настройка направления запуска и остановки режима скорости IO:Двигатель с сигналом уровня доступа IN3 начинает работать, а мотор с сигналом уровня доступа IN4 переключает направление работы. Параметры, связанные со скоростью, измеряются параметрами движения в программном обеспечении для отладки. Проводка COM + подключена к 24 положительным, IN3 и IN4 подключены к 0 В.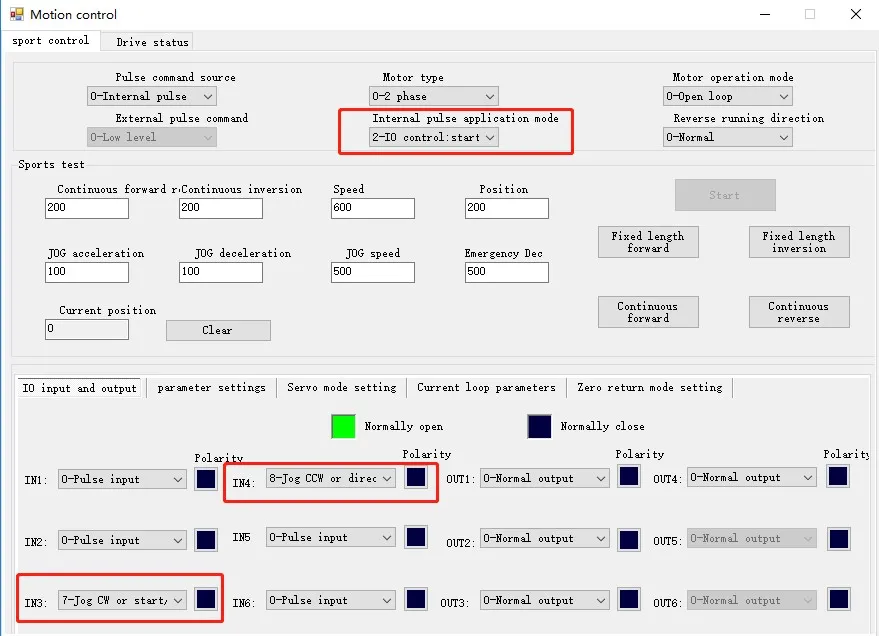 (3) настройки скорости ввода-вывода вперед и назад:
(3) настройки скорости ввода-вывода вперед и назад:IN3 уровень доступа сигнала двигателя вперед вращения, IN3 разъединить IN4 уровень доступа сигнала двигателя обратного вращения. Параметры скорости и проводка такие же, как и Пуск и стоп плюс реверс.
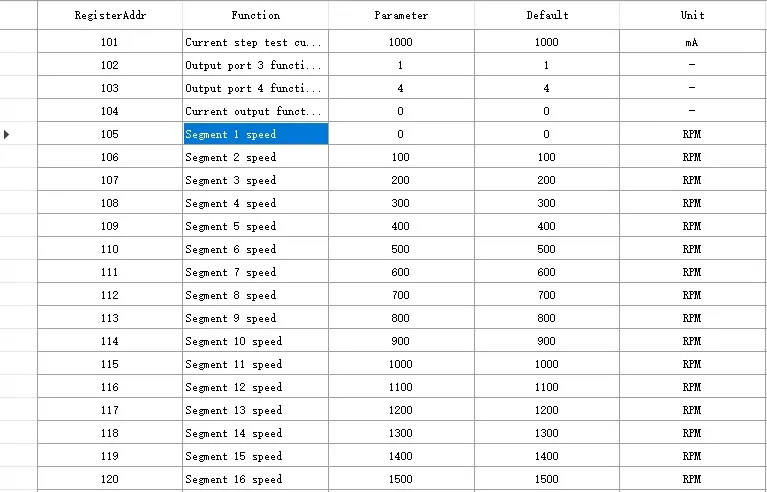
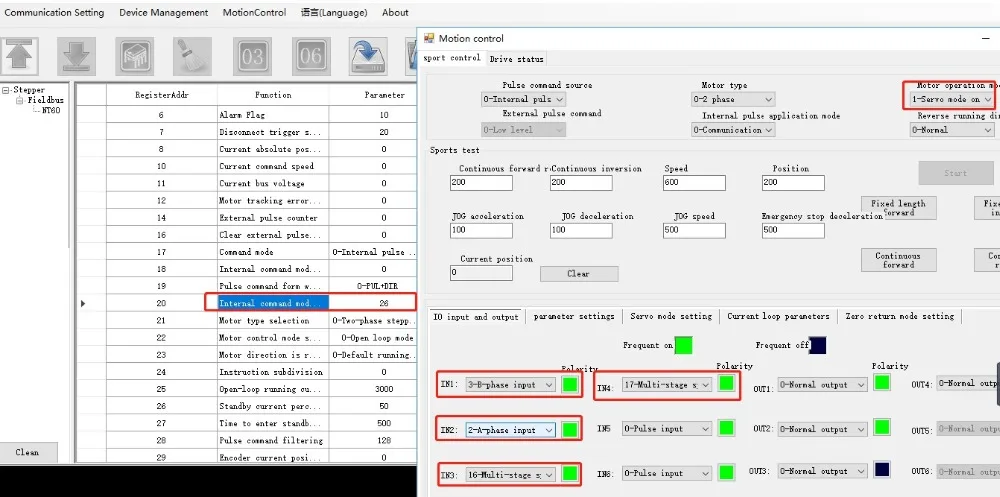
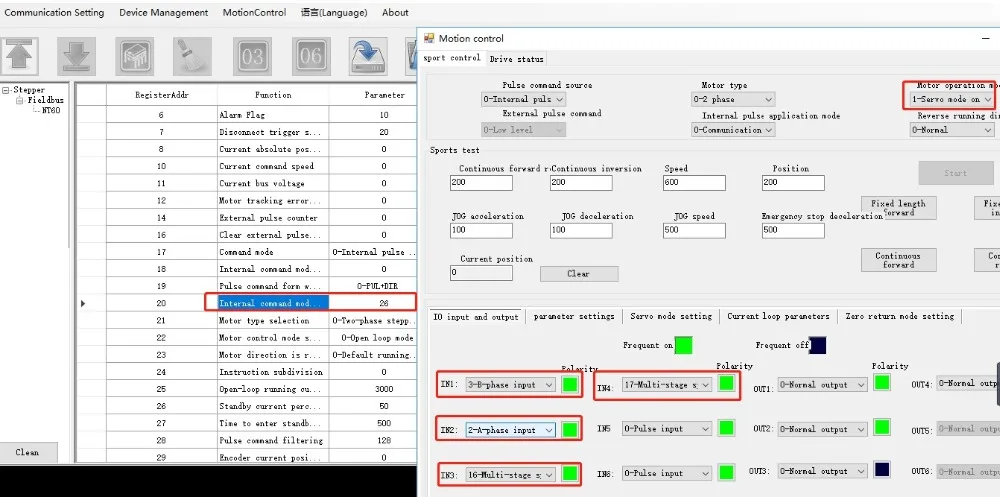
 (4)16-сегмент скорость установки таблицы:Регистры P105 ~ P120 устанавливают скорость двигателя. Запуск счетчика скорости-это бинарное расположение, например, запуск многоступенчатого контроля скорости 1 100 об/мин, состояние порта ввода-вывода-0 0 0 1. Обратите внимание, что многоступенчатое Управление скоростью 0 обычно по умолчанию 0 об/мин, и мотор останавливается, когда все порты IO равны 0.
(4)16-сегмент скорость установки таблицы:Регистры P105 ~ P120 устанавливают скорость двигателя. Запуск счетчика скорости-это бинарное расположение, например, запуск многоступенчатого контроля скорости 1 100 об/мин, состояние порта ввода-вывода-0 0 0 1. Обратите внимание, что многоступенчатое Управление скоростью 0 обычно по умолчанию 0 об/мин, и мотор останавливается, когда все порты IO равны 0.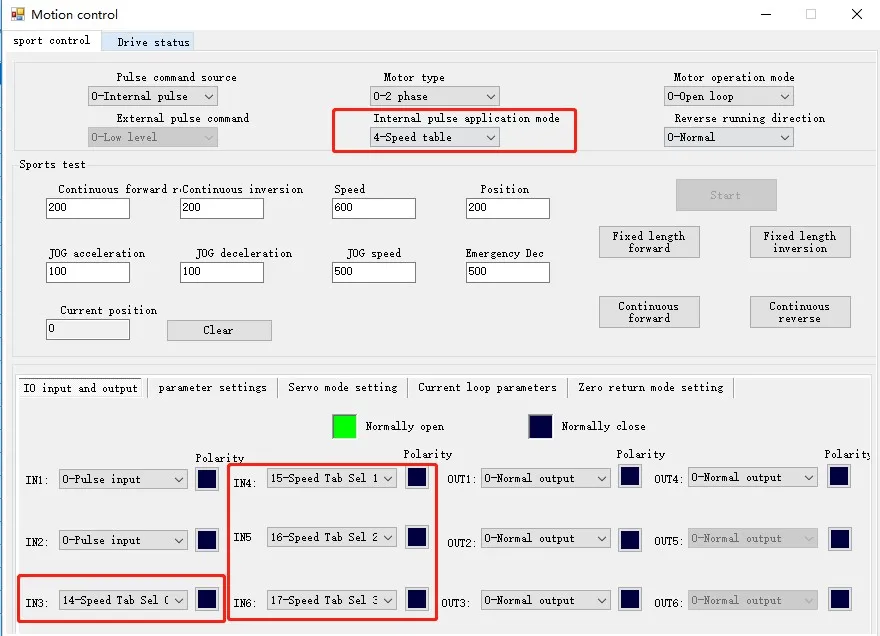
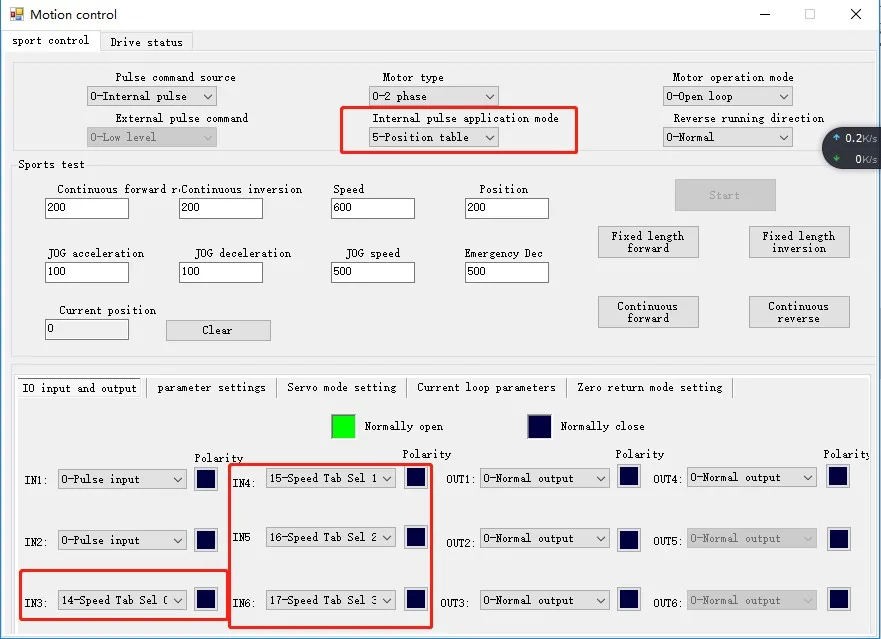
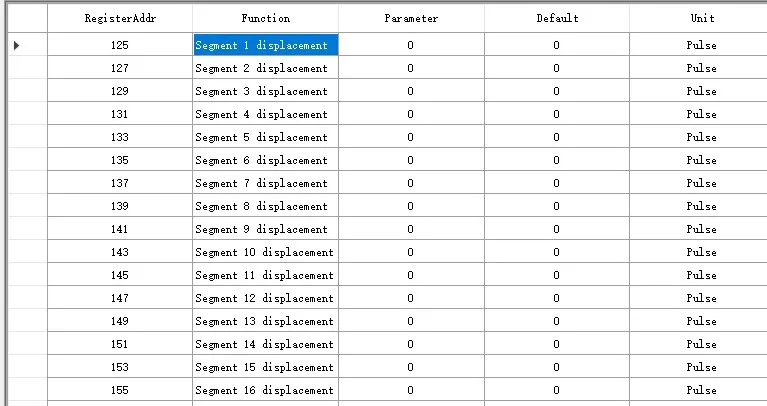
(5) 16-сегмент позиции установки таблицы:
В РЕГИСТРАХ P125 ~ P155 устанавливается ход двигателя, а P72-скорость. Метод запуска совпадает со спидометром.
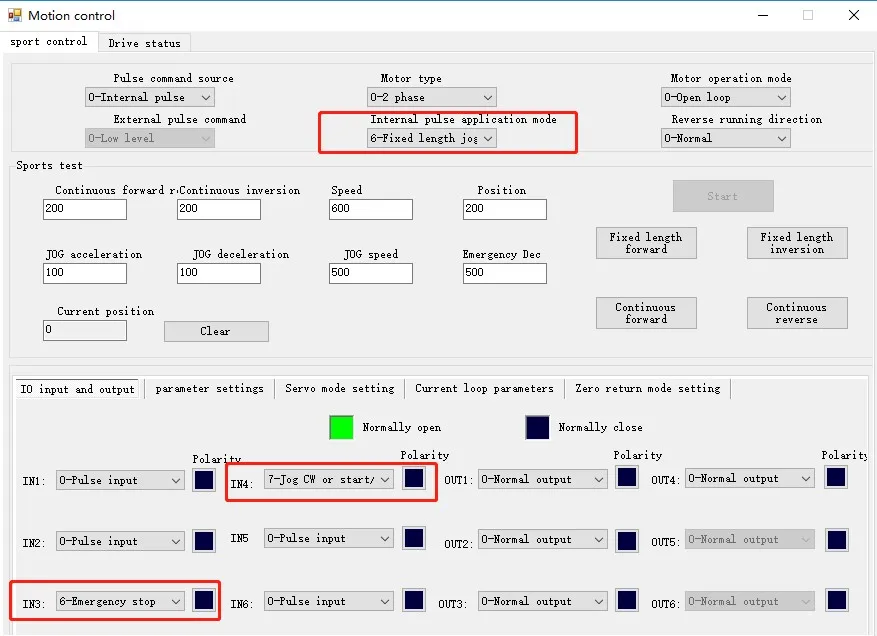
(6) установленная длина пробежки:
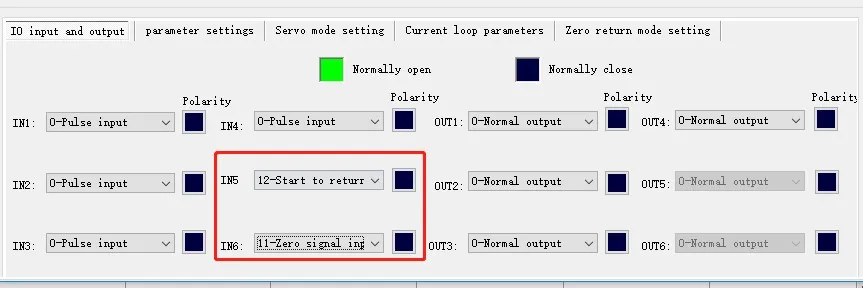
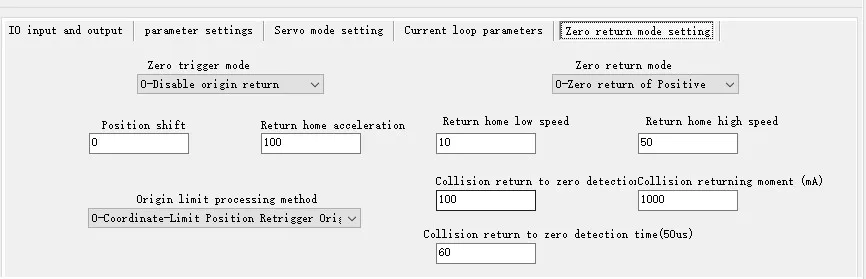
(7) возврат к нулевым настройкам:
Параметры режима наведения доступны только в новейшем по для отладки ntconfiguator 1.0.0.44. Старое программное обеспечение для отладки необходимо изменить, написав значение в функциональном коде 06.
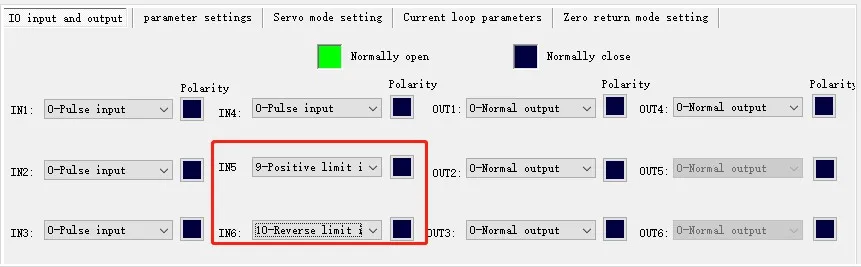
(8) предельная установка:
Предел-датчик типа PNP по умолчанию, И полярность порта ввода-вывода должна быть изменена, когда подключен датчик типа NPN (зеленая маленькая точка черная и выключение питания и перезагрузка, чтобы получить эффект).
(9) Настройка аналогового скоростного режима:
Подключите Внутренний провод драйвера к потенциометру, а затем установите параметры, такие как P272 смещение, P273 фильтр, P274 мертвая зона, P275 нулевой дрейф, p276 3,3 В Соответствующая скорость и так далее.
Дрейф нуля:Относится к значению напряжения выборки водителя относительно GND, когда входное напряжение аналогового канала равное нулю.
Офсетная печать:После того, как значение нулевого дрейфа исправлено, соответствующее значение входного напряжения аналогового канала, когда напряжение выборки нулевое.
Мертвые зоны:Когда напряжение выборки нулевое, это соответствует интервалу входного напряжения аналогового канала.
Настройка скорости:Команда входной скорости при P276 3,3 В Соответствующая скорость.
Скорость вычислений:Фактическая скорость равна напряжению для выборки P277, деленному на 3300 раз P276 3,3 в соответствующей скорости.
(10) Аналоговое положение:

В режиме приложения аналогового отслеживания положения в сигнале start-stop или enable trigger нет другого. Аналоговое входное напряжение изменяется потенциометром и другими устройствами, чтобы соответствовать аналоговому положении. Поскольку нет внешнего сигнала включения/запуска, положение аналогового входа может быть отрегулировано сразу после включения. Остерегайтесь возникшего столкновения!
Регистр P214 215 устанавливает команду позиционирования двигателя, а 217 P216 проверяет текущее положение.
(11) Настройка режима крутящего момента:
Режим крутящего момента должен обновиться, чтобы NT60_V230.ehex совпадал с замкнутым мотором.
Режим внутреннего применения 26 обеспечивает вращение крутящего момента вперед, устанавливая IN_multi-step контроль скорости 2 и IN_multi-step контроль скорости 3 до обратного крутящего момента. Параметры крутящего момента:
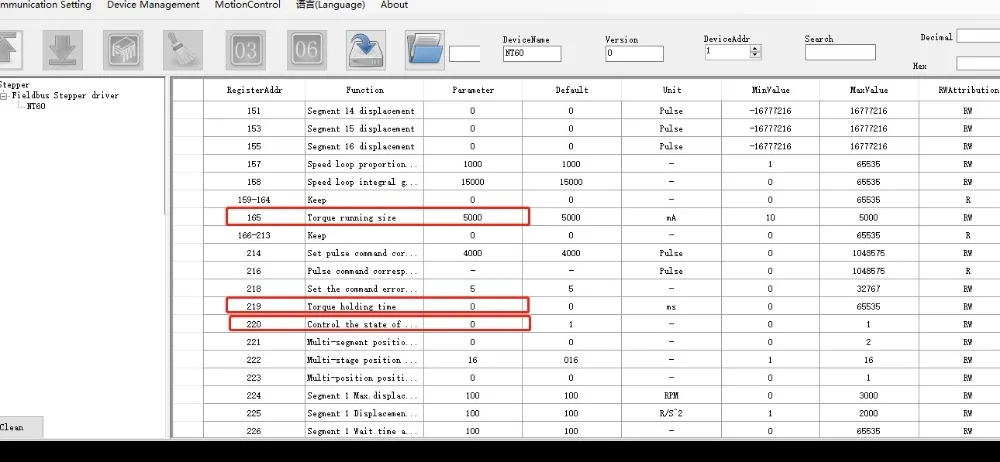
P165 крутящий момент, блок мА
P75-P77 ускорение, замедление, скорость
P219 время удержания крутящего момента, когда блок ms установлен в 0, это означает, что крутящий момент был сохранен. После того, как крутящий момент достигает времени удержания, состояние мотора будет контролироваться P220, в автономном режиме или в фиксированном положении. P220 = 0, двигатель в автономном режиме; P220 = 1, положение двигателя блокирует вал.
Отзывы покупателей
Страна: RU Доставка: Standard Shipping 16.02.2022
Очень высокое качество, очень особенный протокол, очень хорошая документация