




Последнее обновление: 01.05.2022
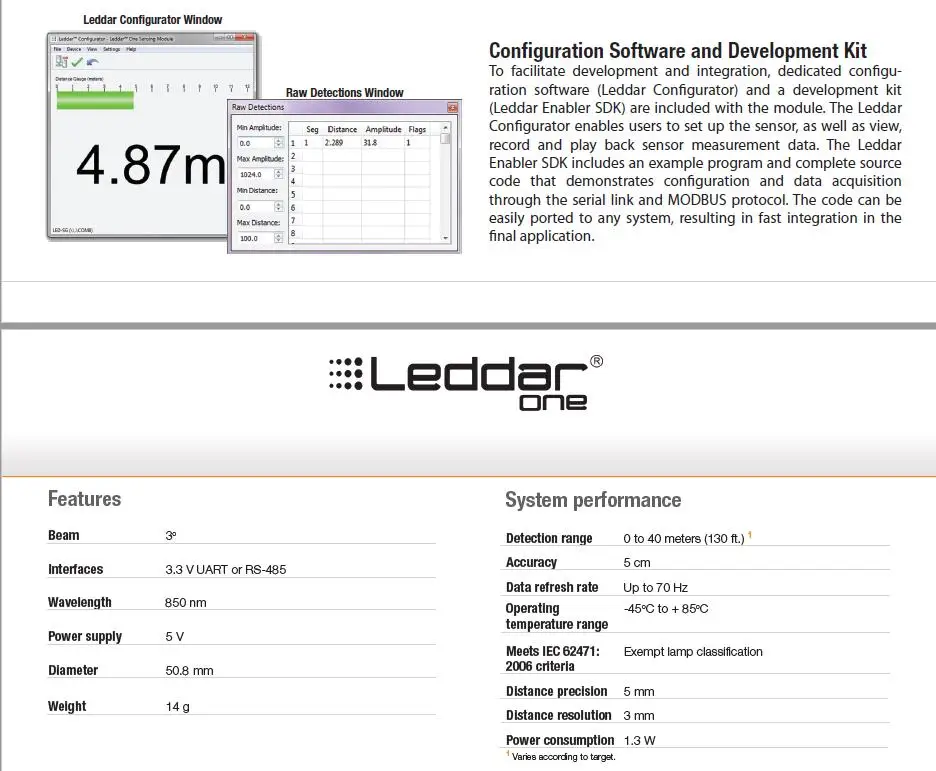
Leddar One LidarСветильник и по разумной цене лидар с диапазоном 40 м, частотой обновления 70 Гц и 3-градусным диффузным лучом. Для получения более подробной информации см.Техническое описание.

Примечание
Поддержка LeddarOne доступна в вертолетах-3.4.2 (или выше), Plane-3,8 (или выше), Rover-3,1 (или выше).
Предупреждение
В Coptere-3.4.2 журналах пользователя были обнаружены сильные шипы в сообщаемом диапазоне, поэтому мы рекомендуем тщательно наземное тестирование указанных расстояний или ждать, пока вертолет-3.4.3 будет выпущен, когда мы надеемся, что выявлена причина этих шипов.
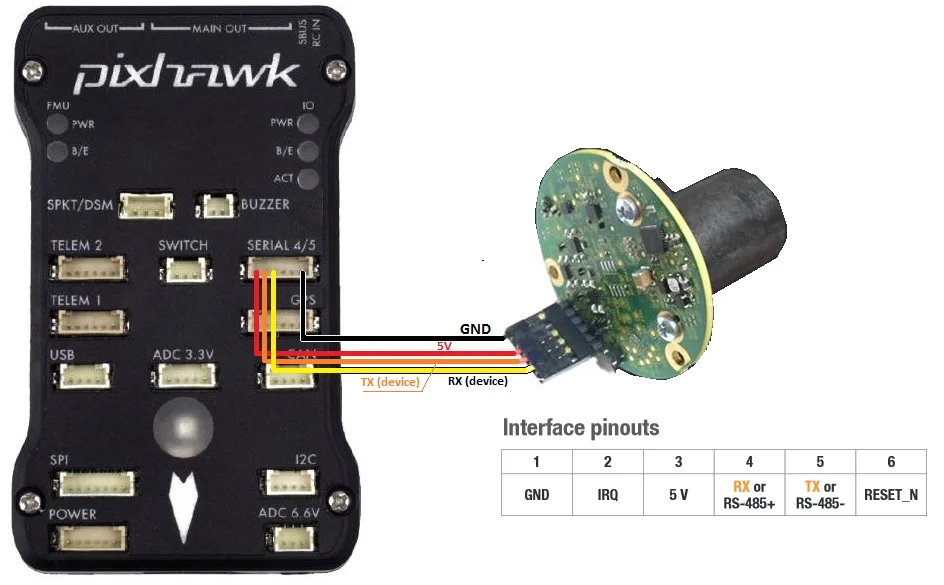
Подключение к PixhawkПоследовательное соединение датчика может быть подключено к любому запасному последовательному порту (т. Е. Telem1, Teleme2, Serial4) на контроллере полета. Подключите линию RX lidar к линии TX контроллера полета UART, линию TX lidar к RX UART, затем также подключите линии GND и 5 В. На рисунке ниже показано, как выходные контакты датчика могут быть подключены к порту серии 4 Pixhawk.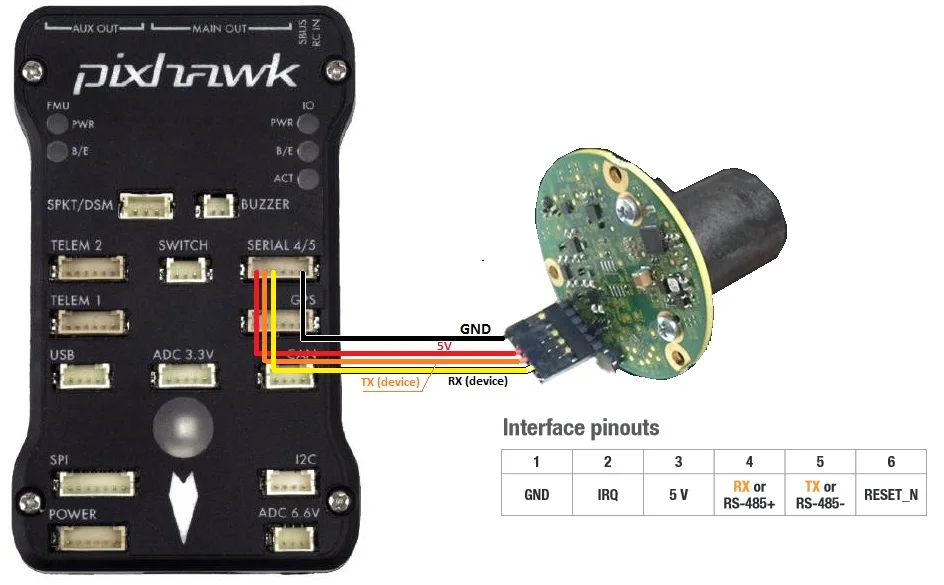
Затем необходимо настроить последовательный порт и параметры дальномера. Если вы использовали порт SERIAL4/5 на Pixhawk, то вы установите следующие параметры (это сделано в планировщике миссийКонфигурация/Настройка | Полный список параметровСтраница):
Серия 4 _ протокол= 9 (лидар)Серия 4 _ бод= 115200RNGFND_TYPE= 12 (леддарон)Rngfnd _ масштабирование= 1RNGFND_MIN_CM= 5RNGFND_MAX_CM=4000(40 м)Это расстояние в сантиметрах, которое дальномер может надежно считывать.RNGFND_GNDCLEAR= 10Или точнее расстояние в сантиметрах от дальномера до земли при посадке транспортного средства. Это значение зависит от того, как вы установили дальномер.Если бы вы вместо этого использовали порт Telem2 на Pixhawk, вы бы установилиСерия 2 _ протокол= 9, иСерий2 _ бод= 115200
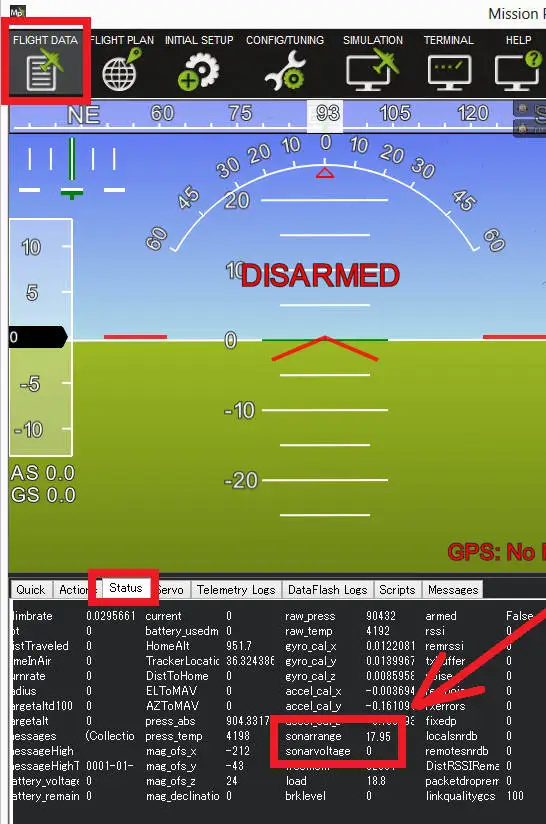
Расстояния, Считываемые датчиком, можно увидеть на вкладке «статус» на экране полетных данных планировщика миссии. Посмотрите внимательно на «сонарандер».
Техническое описание