Особенности продукта:
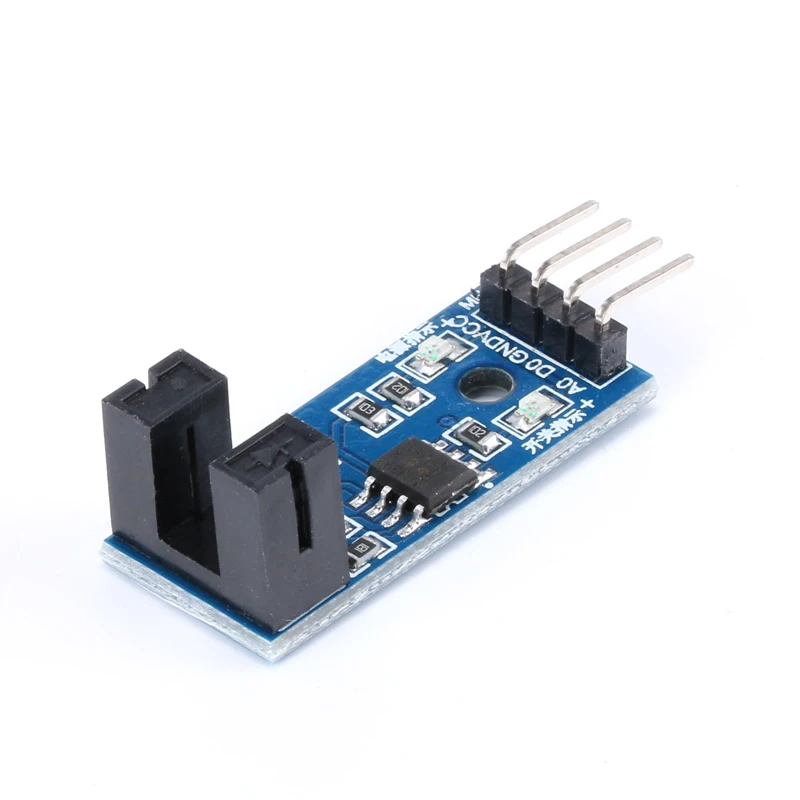
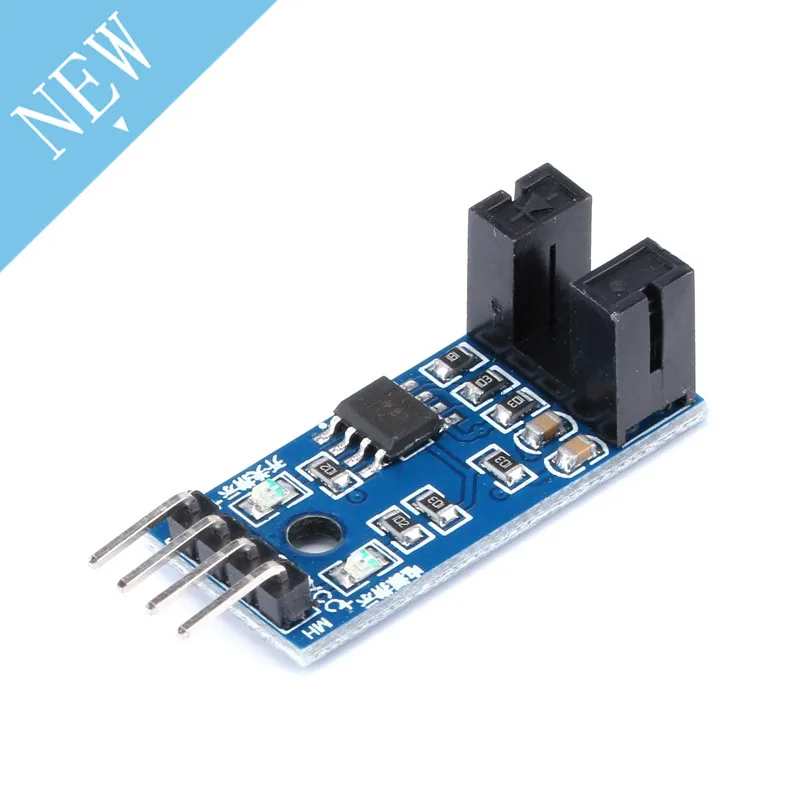
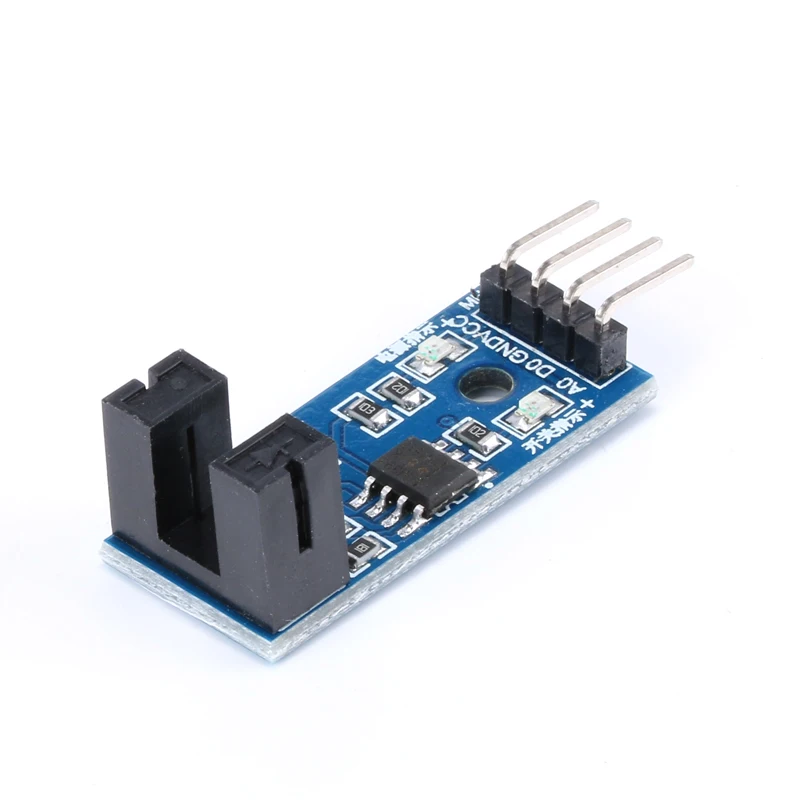
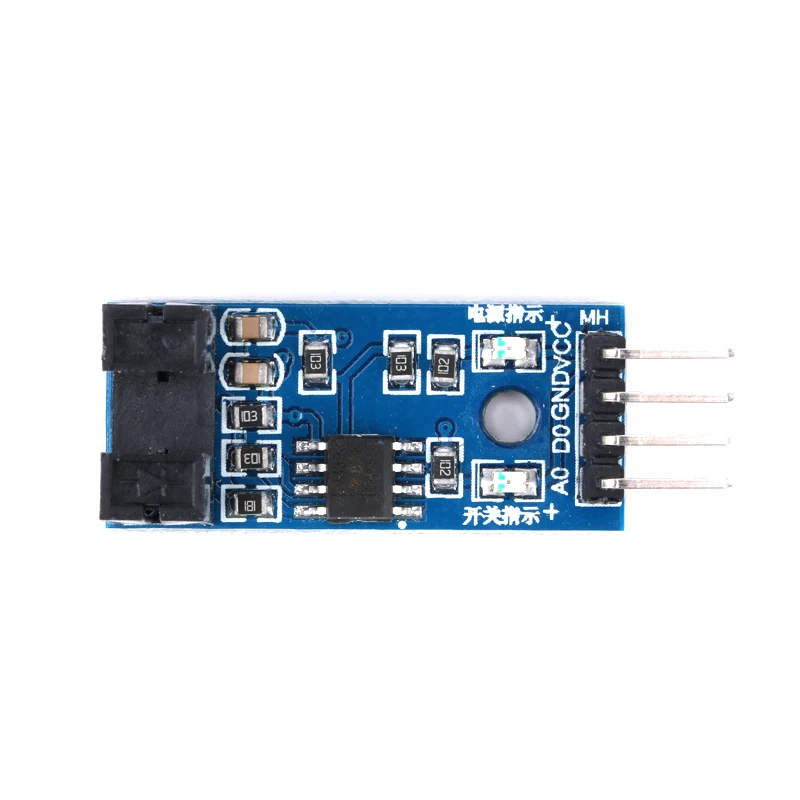
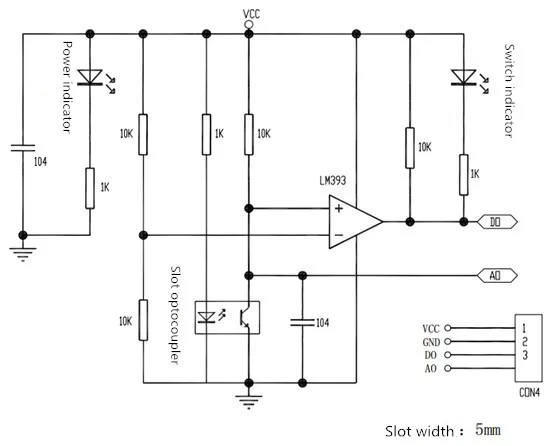
В ITR9606 высокой чувствительности слот оптрон состоит из инфракрасный светильник-светодиод и NPN сквозное отверстие со слотом шириной 5 мм. Датчик оснащенный специальной M3 фиксированный монтажное отверстие. Направление регулировки и фиксация удобны и просты в использовании. Используется компаратор LM393 с широким напряжением. Сигнал чистый, форма сигнала хорошая, и способность к вождению сильна, превышает 15 мА. Широко используется для обнаружения скорости двигателя, подсчета импульса, ограничения положения и т. д.
Параметры продукта:
Рабочее напряжение 3,3 V-5V
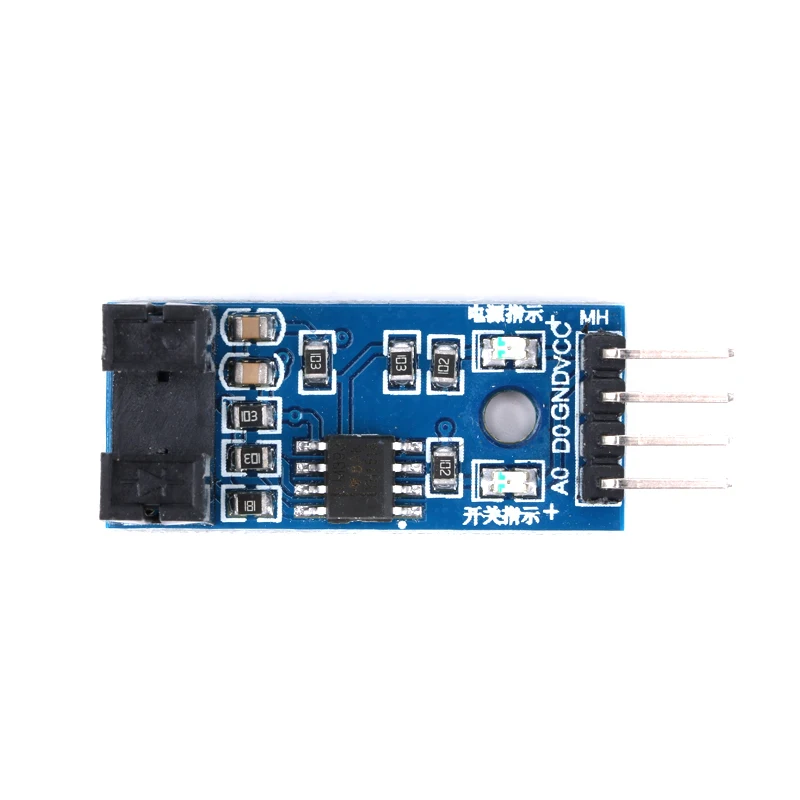
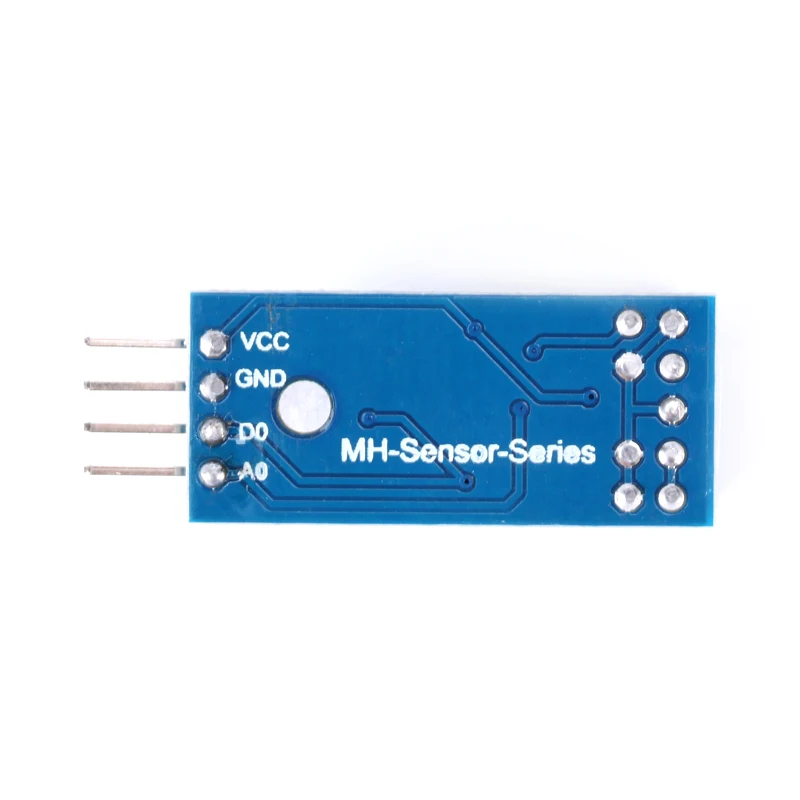
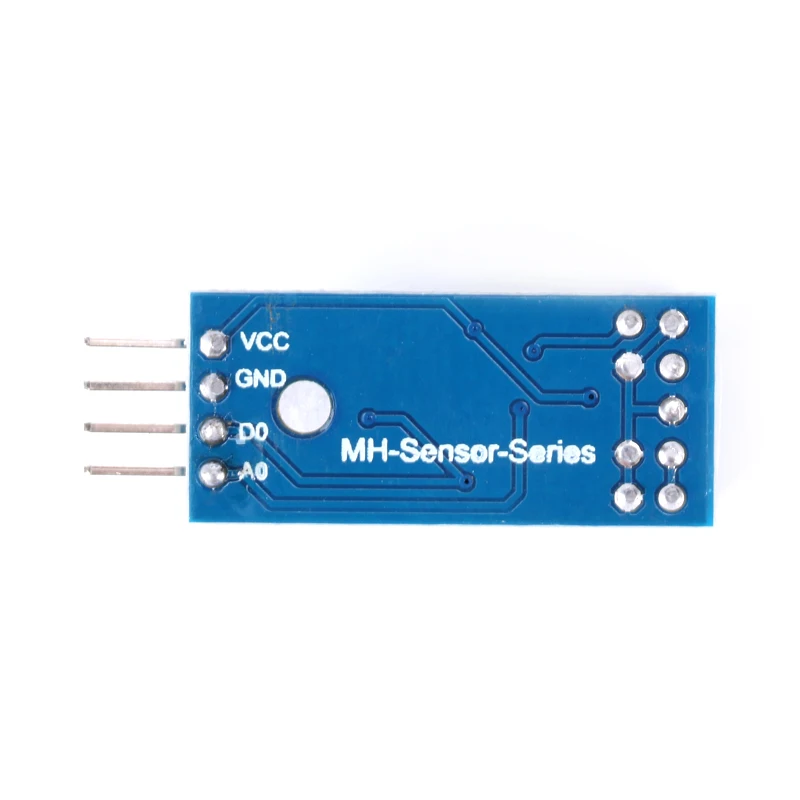
Форма выхода: цифровой переключатель DO Output (0 и 1), аналоговый выход AO pin недействителен
Инструкции по использованию:
Подключите VCC и GND, индикатор питания модуля будет светильник, когда нет блока в слоте модуля, приемная трубка будет включена, модуль будет выпускать низкий уровень, И индикатор переключателя будет включен; При блокировке, Выход DO будет высоким, и индикатор переключателя будет выключен. Модуль может быть подключен к реле для формирования концевого выключателя или тому подобное или может быть подключен к активному модулю зуммера для формирования будильника. Интерфейс DO output может быть непосредственно подключен к порту IO MCU. Как правило, он подключается к внешнему прерыванию, чтобы определить, имеет ли датчик окклюзию. Например, колесо кода двигателя может определить скорость двигателя.
Программирование:
Внешний порт модуля измерения скорости связан с внешним портом прерывания MCU. Когда есть проводимость инфракрасного излучения, это внешний буфер.
Логический дизайн:
Расстояние измерения:
Выход датчика скорости является импульсным сигналом, один Пульс прерывается один раз; Когда инфракрасный луч включен, это низкий уровень, поэтому мы устанавливаем прерывание на низкий уровень сенсорного режима. На колесе общего кода есть целые сетки. Независимо от того, сколько сеток в принципе, например, 10 сеток, то есть 10 пространств. После вращения двигателя луч включается в 10 раз, а внешний низкий уровень-в 10 раз. Установите вышеуказанные идеи, наш датчик скорости может играть эффект, мы знаем, что есть 10 перерывов в круге, поэтому мы рассчитаем количество перерывов, общее количество полученных раз делится на 10-это количество вращения двигателя, а затем согласно периметру колеса, Подсчитывая длину Колеса, вы можете понять, как далеко находится автомобиль.
Скорость измерения:
В соответствии с идеей измерения расстояния, мы используем таймер MCU для расчета количества внешних перерывов, полученных за одну секунду. Например, если мы получим 20 внешних остановок за одну секунду, мы можем определить, что скорость автомобиля составляет 1 секунду, а маленькие колеса поворачиваются на два оборота. Затем рассчитать окружность маленького колеса, вы можете узнать скорость автомобиля в течение 1 секунды.
Меры предосторожности:
Правильная проводка! Никогда не обращайте вспять положительные и отрицательные, в результате чего плата электроники выгорает. Raspberry Pi
Проигрыватель должен установить порт ввода/вывода MCU на режим ввода/приема, в противном случае он не будет доступен. Другие MCUs или более продвинутые платы управления, такие как ARM, должны быть настроены на режим ввода/приема, если порт ввода/вывода должен быть установлен в режим ввода/вывода, другие мудрые не могут быть использованы. MCU серии 51 может использоваться непосредственно без установки режима ввода/вывода.