Подача напряжения 3,3 v, а также предоставляется для arduino библиотеки файл.
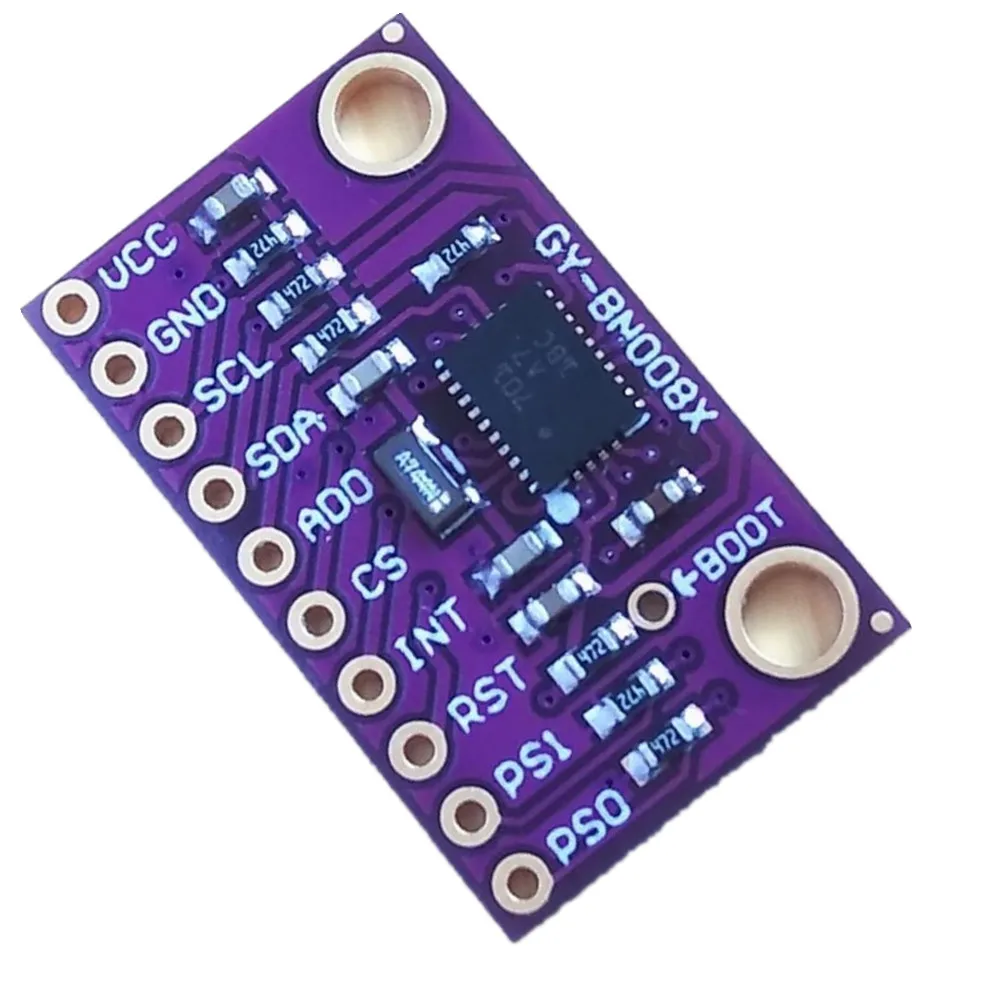
В BNO080 / 085 представляет собой 9-axis системы-в-посылка (SiP), что позволяет легко и быстро развитие датчик с поддержкой дополненной реальности (AR), виртуальная реальность (VR), робототехника и устройства IoT. Разработанная Bosch и Hillcrest лаборатории, он отличается высокой производительности акселерометрами, магнитометры и Гироскопы в маломощный 32-битный процессор ARM Cortex M0 + MCU в небольшом посылка. Программное обеспечение для сенсорного концентратора от hilcrest Freespace® предварительно интегрировано на BNO080 / 085, чтобы обеспечить превосходное отслеживание движения 9-и 6 осей для захватывающих сенсорных приложений в различных потребительских и IoT-продуктах.
BNO080 / 085 обеспечивает специфическую конфигурацию приложения, функциональность и производительность в небольшой посылка «под ключ», которая приносит пользу OEMs за счет сокращения времени на рынок, сокращения времени разработки и затрат на BOM, И обеспечивает высокую точность и качество.
VR IMU использует впечатляющий BNO080 IMU. IC имеет комбинацию трехосевых акселерометров/gyros/магнитометров, которые работают с ARM Cortex M0 + и работают мощные алгоритмы. Блок инерционного измерения BNO080 (IMU) генерирует точные вращающиеся векторные заголовки, которые идеально подходят для VR и других приложений с статической погрешностью вращения 2 или менее градусов. Это то, чего мы ожидали: все данные датчика объединены и дрейфуют, исправлены до значимой, точной информации IMU.
IC предназначен для реализации в телефоне на базе Android, чтобы обрабатывать все расчеты, необходимые для очков виртуальной реальности, используя только ваш телефон. Датчик очень мощный и мощность сложная. Предоставляется I2C-based библиотека, которая обеспечивает вращение векторов (большинство людей хотят читать из IMU), а также ускорение, гироскоп и показания магнитометра, шаги, Классификаторы активности (например, Велоспорт) И калибровке.
VR IMU создала приложение для обработки демонстраций, чтобы увидеть, как движение IMU точно манипулирует 3d-объектами с помощью quaternion вывода IMU.
Если I2C не является вашим первым вариантом связи, датчик также может общаться через SPI и UART! Если вы используете UART, мы рекомендуем легко подключаться с помощью Serial Basic.
Эта версия оснащена встроенным кристаллом 32 кГц для повышения точности и более точного тиснения времени.
Особенности
Интерфейсы:
Bwi080 может общаться через различные интерфейсы. Qwiic VR IMU имеет два перемычки, которые позволяют пользователю выбрать их интерфейс по выбору.
I2C (по умолчанию): до 400 кГц
SPI: до 3 МГц
UART: 3 Мбит/с
UART-RVC (робот-пылесос): 115200 кбит/с
Эксплуатационные характеристики:
Вектор вращения
Динамический ошибка: 3,5 °
Статическая ошибка: 2,0 °
Игровой вращения вектор
Динамический ошибка: 2,5 °
Статическая ошибка: 1,5 °
Заголовок дрейф: 0,5 °/мин
Геомагнитный вращения вектор
Динамический вращения ошибка: 4,5 °
Статический вращения ошибка: 3,0 °
Гравитационный угол ошибка: 1,5 °
Линейный датчик ускорения точность: 0,35 m/s2
Акселерометр Точность: 0,3 m/s2
Точность гироскопа: 3,1 °/сек
Магнитометр точность: 1.4μT