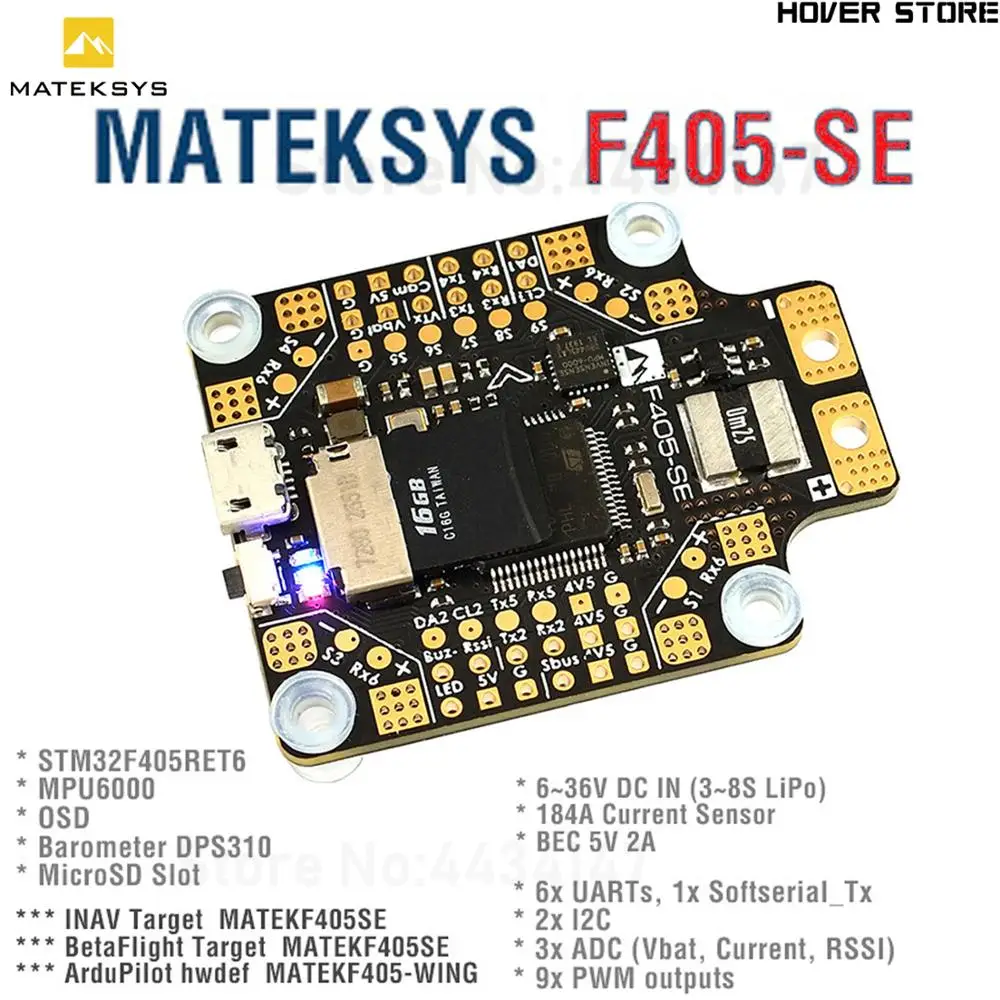








Контроллер полета Matek F405-SE F405 SE STM32F405RET6 OSD 5 В2 а датчик тока BEC F4 для F405-CTR обновленного радиоуправляемого мультикоптера 
Последнее обновление: 05.06.2022

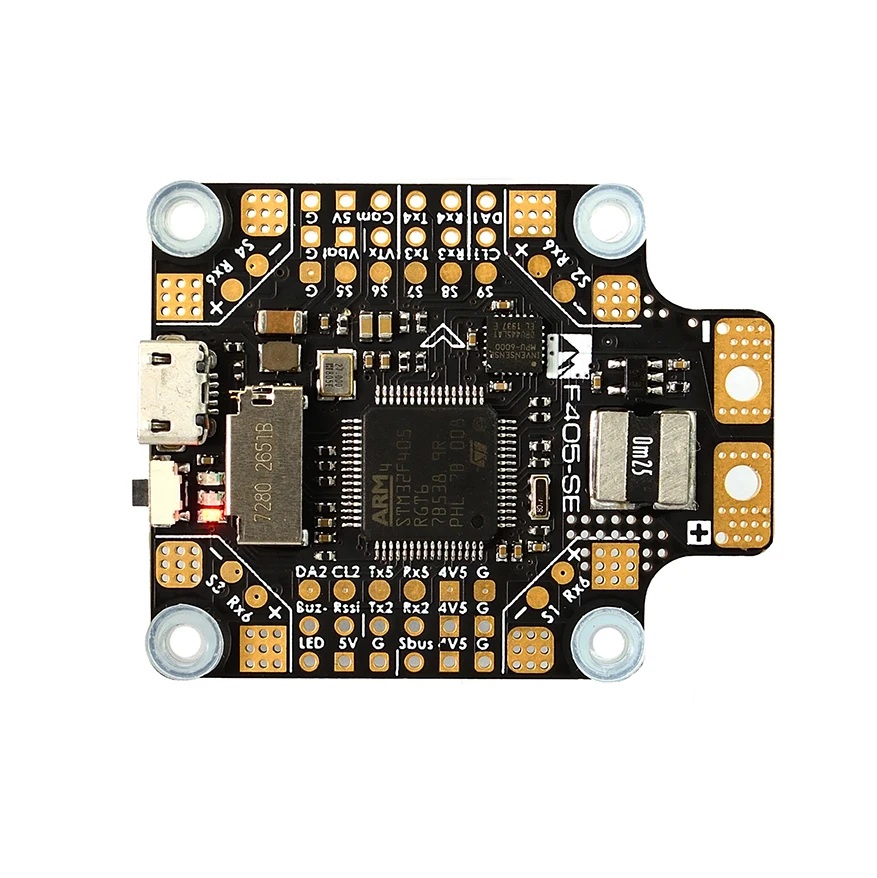
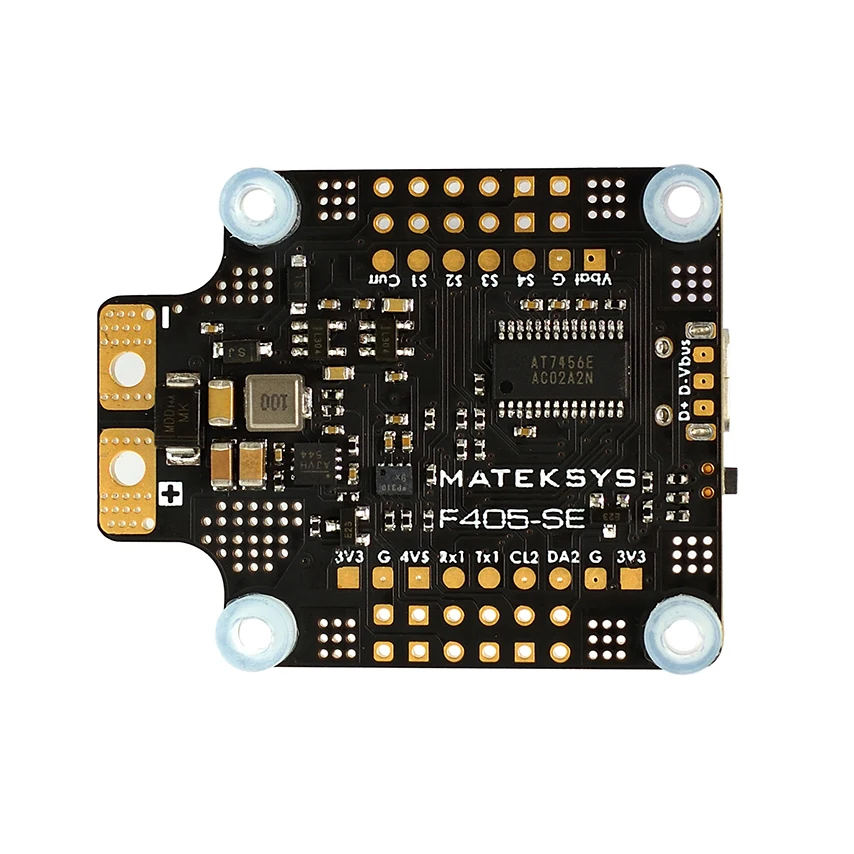
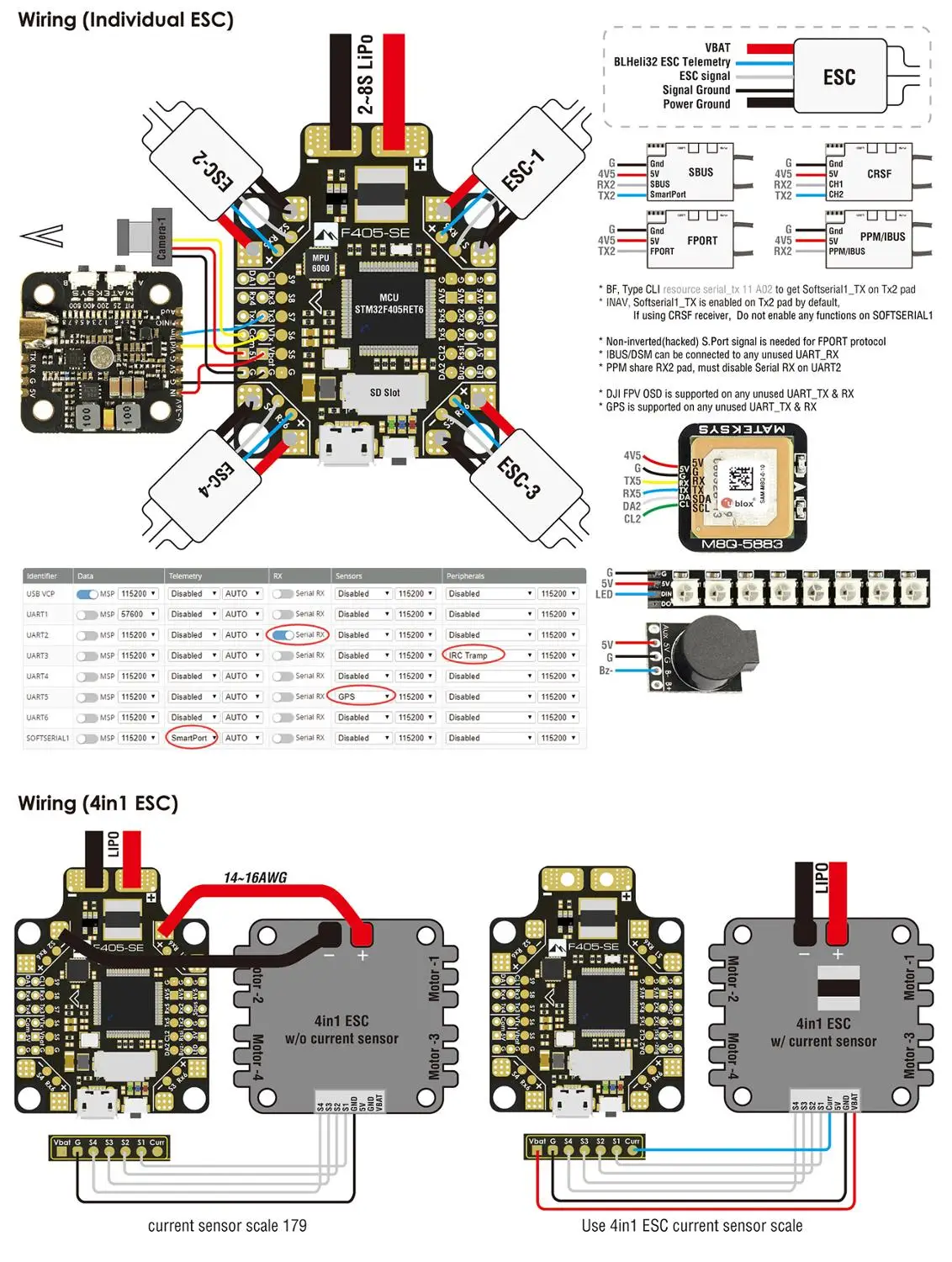
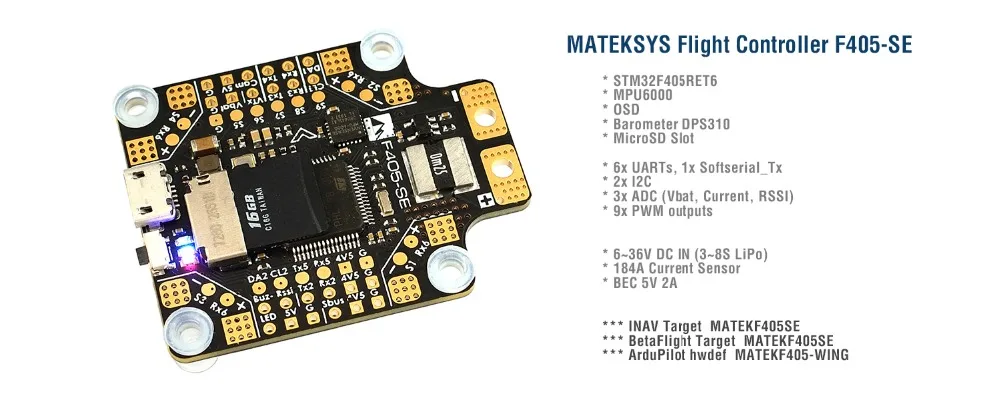
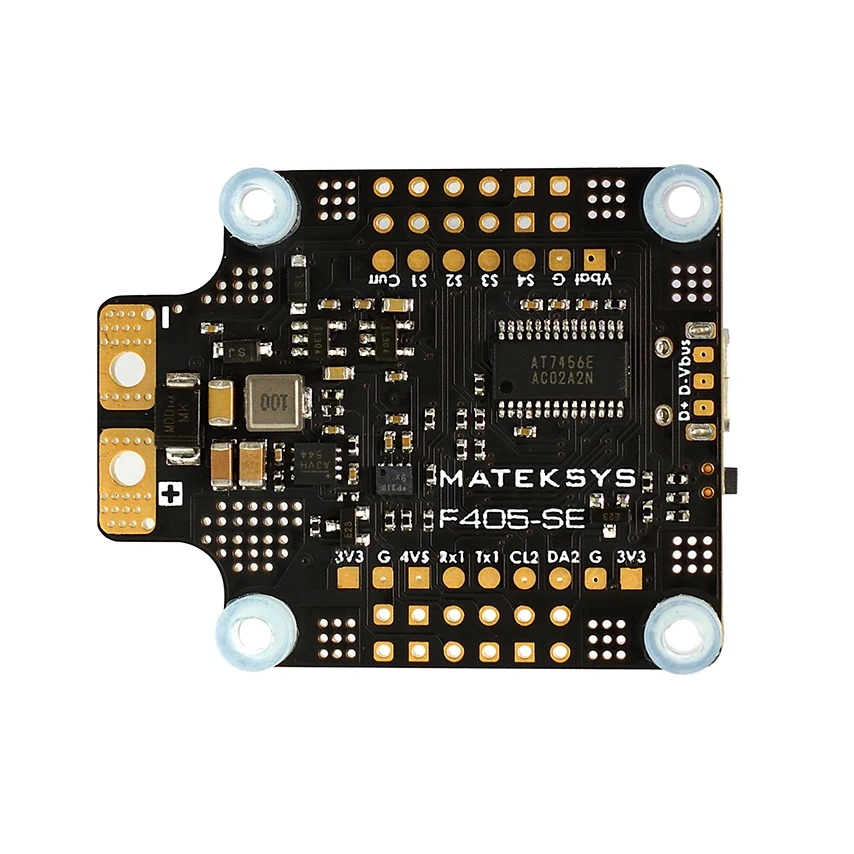
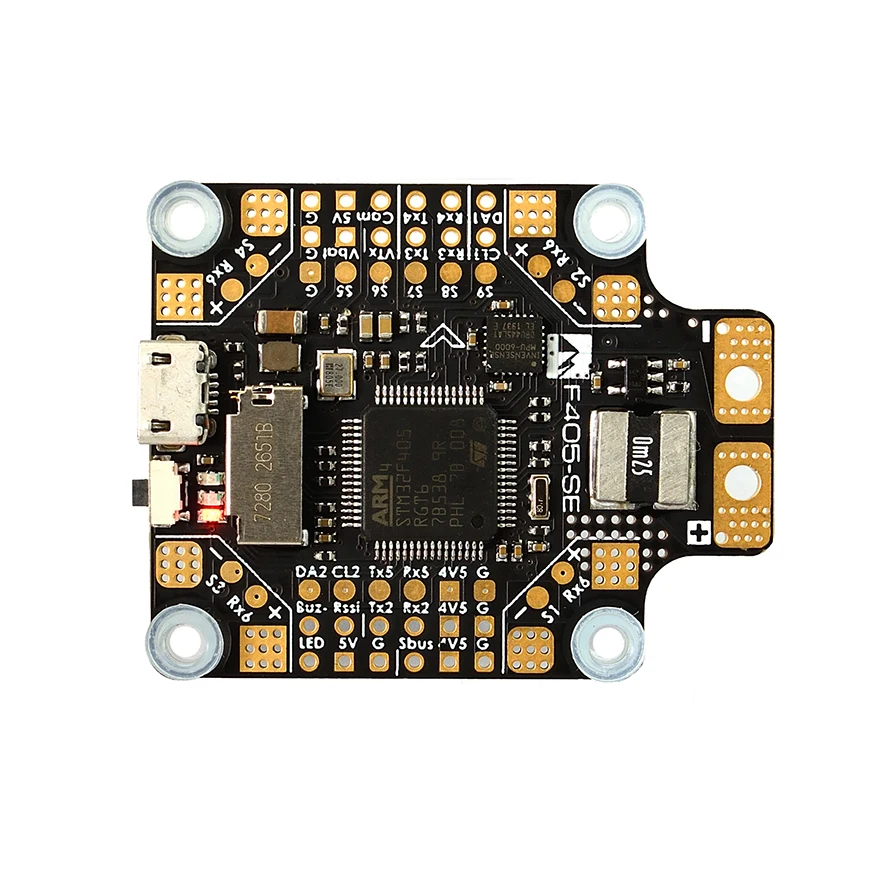
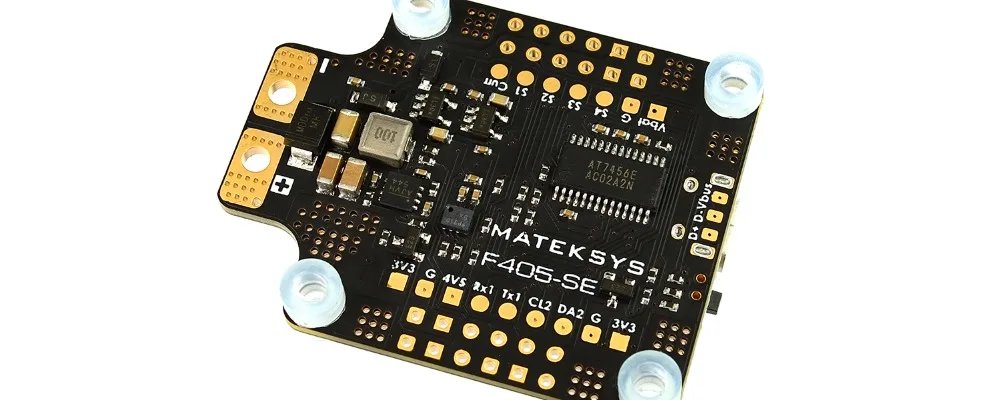
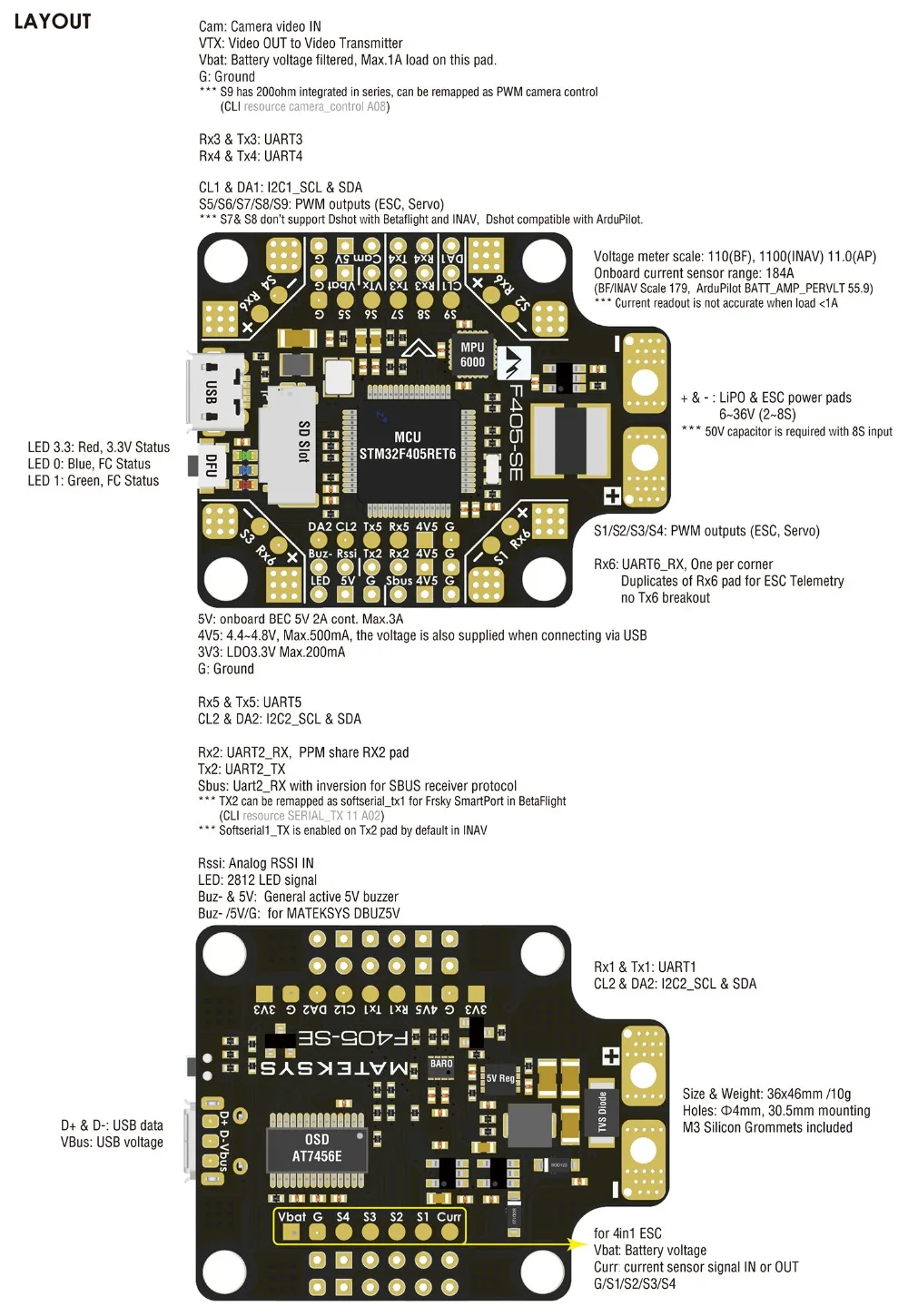
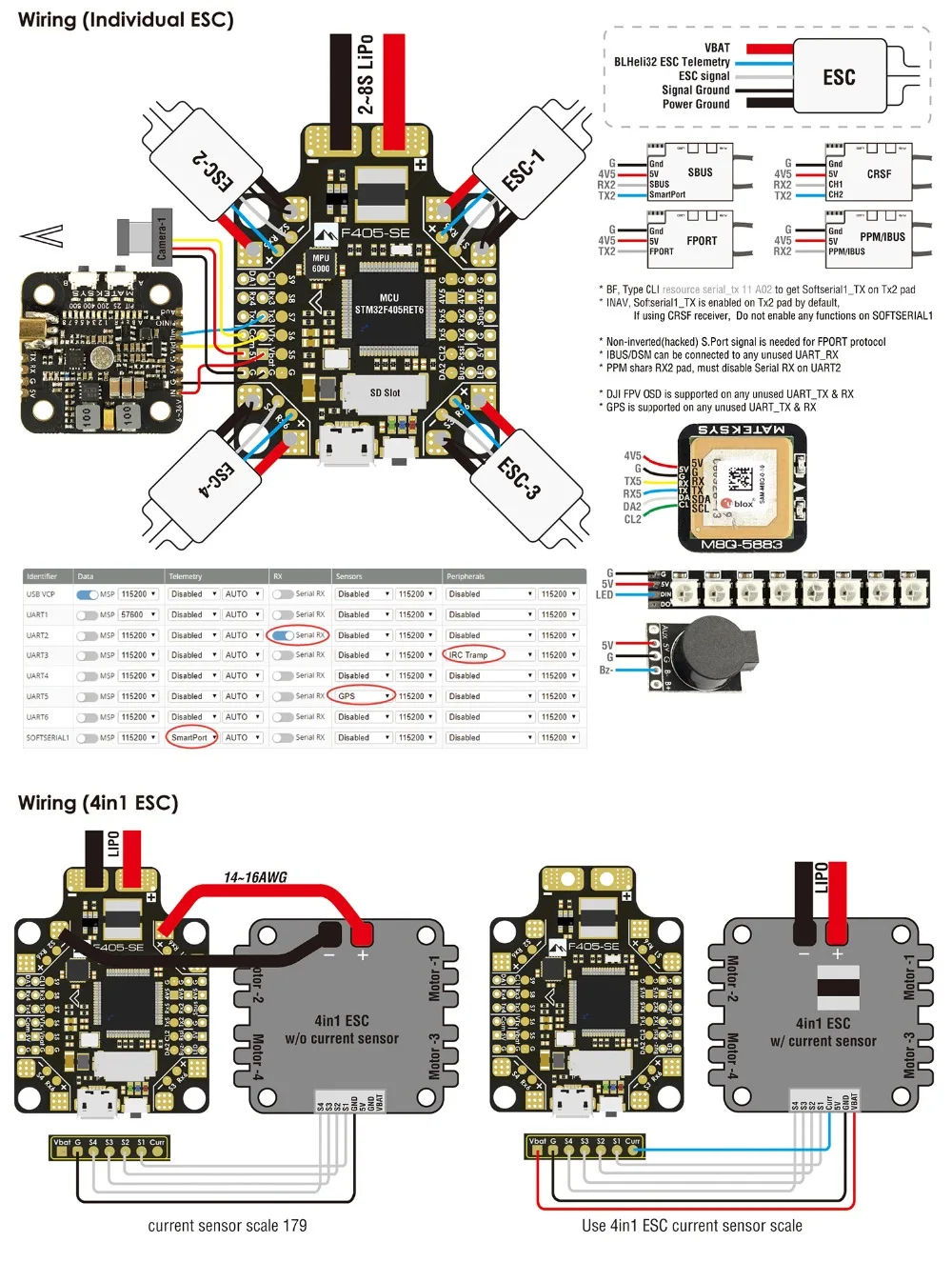
F405-SE руководство по быстрому запуску Технические характеристики MCU: 168 МГц STM32F405RET6 IMU: MPU6000 (SPI) Баро: DPS310 (I2C) OSD: AT7456E (SPI) Черный ящик: слот MicroSD (SPI) Поддержка VCP & 6x Uarts, 1x Softserial_Tx 9x PWM выходов (7x Dshot совместим с BF/INAV) 2x I2C 3x ADC (напряжение, ток, RSSI) 4x RX6 pad (один за угол) для BLheli32 ESC Телеметрия 4x индивидуальные электромагнитные/Сигнальные колодки ESC 1x группа G/S1/S2/S3/S4 колодки для 4in1 ESC сигнала/GND 3х светодиодов для состояния FC (синий, зеленый) и 3,3 В индикатор (красный) Встроенный инвертор на UART2-RX для ввода SBUS PPM/UART общий: UART2-RX Фильтруемая выходная мощность Vbat для VTX Управление камерой: Да Smartaudio & Tramp VTX протокол: Да Протокол DJI FPV OSD: Да WS2812 Светодиодная лента: Да Бипер: Да RSSI: Да Технические характеристики PDB Вход: 6 ~ 36 В (2 ~ 8S LiPo) с защитой телевизоров PDB: 4x35A (макс. 4x46a) BEC: 5V 2A cont. (Макс. 3 а) LDO 3,3 В: Макс. 200 мА Датчик тока 184A (масштаб 179 в INAV/BF) Датчик напряжения батареи: 1K:10K Прошивка INAV: MATEKF405SE BetaFlight: MATEKF405SE ArduPilot: MATEKF405-WING Физический Крепление: 30,5x30,5 мм, Φ4мм с люверсами Φ3мм Размеры: 36x46 мм Вес: 10 г Включая 1x F405-SE 6x силиконовые прокладки M4-M3 1х FR4 печатная плата 36*36*1 мм 1x Rubycon ZLH 35V/470uF (низкий ESR) Включая INAV & BetaFlighe
Remap S9 as PWM Управление камерой
Ресурс camera_control A08 Управление камерой PWM не 100% работает с каждой камерой из-за допуска напряжения камеры.Перекарта TX2 как Softserial1_TX
Ресурс serial_tx 11 A02Remap S7/S8 as servos
Сервопривод 1 B14 Ресурс сервопривода 2 в1 ArdupilotШИМ
S1 ~ S9 и светодиодный Dshot и PWM. Однако смешивание Dshot и нормальная работа PWM для выходов ограничено в группы, т. Е. Включение Dshot для вывода в группе требует, чтобы все выходы в этой группе были настроены и использованы как Dshot, а не PWM выходы.
Если сервопривод и двигатель смешиваются в одной и той же группе, убедитесь, что эта группа работает с самой низкой частотой ШИМ в соответствии со спецификацией сервопривода. Т. Е. Сервопривод поддерживает максимум 50 Гц, ESC должен работать при 50 Гц в этой группе.
S1 PWM1 GPIO50 PB7 TIM4_CH2 Группа 1 S2 PWM2 GPIO51 PB6 TIM4_CH1 S3 PWM3 GPIO52 PB0 TIM3_CH3 Группа 2 S4 PWM4 GPIO53 PB1 TIM3_CH4 S5 PWM5 GPIO54 PC8 TIM8_CH3 Gourp3 S6 PWM6 GPIO55 PC9 TIM8_CH4 S7 PWM7 GPIO56 PB14 TIM1_CH2N Gourp4 S8 PWM8 GPIO57 PB15 TIM1_CH3N S9 PWM9 GPIO58 PA8 TIM1_CH1 Gourp5 Светодиодный PWM10 GPIO59 PA15 TIM2_CH1 Gourp6 SERVO10_FUNCTION 120, NTF_LED_TYPES neoixel ADC Без подкладки 1K:10K делитель builtin 0 ~ 36 В вход На плате напряжение батареи BATT_VOLT_PIN BATT_VOLT_MULT 10 11,0 Без подкладки 0 ~ 3,3 В Датчик тока на плате BATT_CURR_PIN BATT_AMP_PERVLT 11 55,9 Коврик RSSI 0 ~ 3,3 В RSSI ADC Аналоговый RSSI RSSI_ANA_PIN RSSI_TYPE 15 2. I2C I2C2 Цифровая скорость полета I2C ARSPD_BUS ARSPD_PIN 1. 65 MS4525 MS5525 DLVR-L10D ARSPD_TYPE 1. 3. 9 I2C2 Компас COMPASS_AUTODEC 1. I2C1 На борту Baro DPS310 UART USB USB Консоль Серия 0 TX1 RX1 USART1 Телем1 Серия 1 TX2 RX2, SBUS USART2 RC вход/приемник Серия 2 TX3 RX3 USART3 GPS1 Серия 3 TX4 RX4 UART4 GPS2 Серия 4 TX5 RX5 UART5 Используется для GPS SERIAL5_PROTOCOL 5 Серия 5 RX6 USART6 Телеметрия ESC SERIAL6_PROTOCOL 16 Серия 6 Frsky Smartport Телеметрия Неинвертированный (взломанный) Сигнал S.Port Любые запасные части Uart_TX SERIALx_BAUD 57 SERIALx_OPTIONS 7 SERIALx_PROTOCOL 4 Важные Примечания и советы *** Известная проблема/ошибка: BetaFlight не поддерживает барометр DPS310, работает с STM32F405. F405-SE имеет встроенную прошивку INAV для контроля качества INAV2.5.1, загруженный с конфигуратора, не поддерживает новый барометр DPS310. загрузите индивидуальную прошивку здесь. DPS310 будет официально поддерживаться INAV2.6 и новым конфигуратором. Прошивка ArduPilot “MATEKF405-WING & Prime; До 25 июня не поддерживает встроенный барометр DPS310. пожалуйста, загрузите прошивку с«Последняя» папка.Флуоресцентный
Если Баро не может быть обнаружен. В режиме INAV CLI введите команду
Набор baro_hardware = DPS310 СохранитьФлуоресцентный
Известная проблема/ошибка: DPS310 не будет работать, даже если вы введете следующую команду CLI. Набор baro_bustype = I2C Набор baro_i2c_device = 1 Набор baro_i2c_address = 118 Набор baro_hardware = DPS310 СохранитьF405-SE vs F405-CTR SKU F405-SE F405-CTR Запуск Aug.2020 Nov.2017 Цель INAV MatekF405SE MatekF405 Цель BetaFlight MatekF405SE MatekF405CTR Ardupilot hwdef MatekF405-WING MatekF405 MCU STM32F405 STM32F405 IMU MP6000 MP6000 Баро DPS310 BMP280 OSD AT7456E AT7456E Черный ящик MicroSD MicroSD PWM выходы 9 6 UART 6 5 I2C 2 1. Макс. Напряжение 36 В (8S) 30 в (6S) Текущее чувство 184A 184A PDB 4x35A (4x46A) 4x30A (4x46A) 5 В 2а 2а


Отзывы покупателей
Страна: RU Доставка: Standard Shipping 07.06.2021
Пришло закрученным в метровую пупырку, надёжно, как и просил продавца) Доставка около недели до НН. В работе не проверял

Страна: IL Доставка: Standard Shipping 01.03.2021
товаром доволен. все хорошо





I***i
Страна: RU Доставка: Standard Shipping 23.02.2021
Пришло быстро.



A***v
Страна: RU Доставка: Standard Shipping 14.03.2021
доставка до СПб 17 дней трек номер отслеживается. работает как надо.
M***v
Страна: RU Доставка: Standard Shipping 21.03.2021
комплект полный. выглядит не плохо.возможности проверить пока нет
V***N
Страна: RU Доставка: Standard Shipping 24.02.2021
От заказа до получения в СПб 35 дней. Прошился в INAV без заморочек, все, что положено отображается и работает. Замечаний нет.
A***v
Страна: RU Доставка: Standard Shipping 18.03.2021
Контроллер пришел относительно быстро. Качество изготовления просто класс! Работоспособность чуть позже проверю. Продавец общительный, отвечает сразу.
K***o
Страна: RU Доставка: Standard Shipping 12.04.2021
отправка на следующий день, быстрая доставкка. все четко, одним словом.
Z***a
Страна: RU Доставка: Standard Shipping 11.04.2021
Отправка максимально долгая, в остальном всё отлично. Спасибо!

Покупатель
Страна: UA Доставка: Standard Shipping 15.04.2021
Все хорошо!