








Последнее обновление: 11.03.2022
Корейский робот-робот YUJIN ROS ROBOT chassis (turtlebot 2/kobuki) SLAM с открытым исходным кодом разработка Мобильная платформа умный пульт дистанционного управленияОтгрузочная ведомость
 ProjectDescription
ProjectDescription
1 комплектTurtleBot 2 СБатарея (Стандартная батарея или большая батарея илиБатарея увеличенной емкости)
Примечание:
Стандартный аккумулятор: 2200 мАч
Большой аккумулятор: 4400 мАч
Большая батарея: 8800 мАч (4400 мАч * 2)
В комплект поставки не входит ворс для зарядки. Если вам нужна зарядка, пожалуйста, приобретайте ее отдельно.
ProjectDescriptionKobukiYourIdeaasitisintherealСрок службыВС низким уровнем costR & DplatformwiththetopФункцииKobukiHashighlyreliableodometryandlongbatteryhoursandprovidespowerforanexternalsensorandactuator. Withthestructurecustomizedbyauser'sdemand,itfordevelopmentandresearchofvariousРоботов.Turtlebot2 СсылкаТуфли на платформе•Supplyofaccurateodometrythrough3-axlegyroandhigh-resolutionwheelКодировщик• InstallationofimbeddedboardispossiblethroughRx/TxpingserialportandUSB.• Supportofadditionalpowertonewsensorsandactuatorsthrough5V/1A,12 В/1,5 a, и 12V/5ApowerРозетки.• 3hourswiththebasicbatterandmorethan7hoursofoperationwithbig-sizedbattery(По желанию)• Ap/ 2,1 Apowersocket.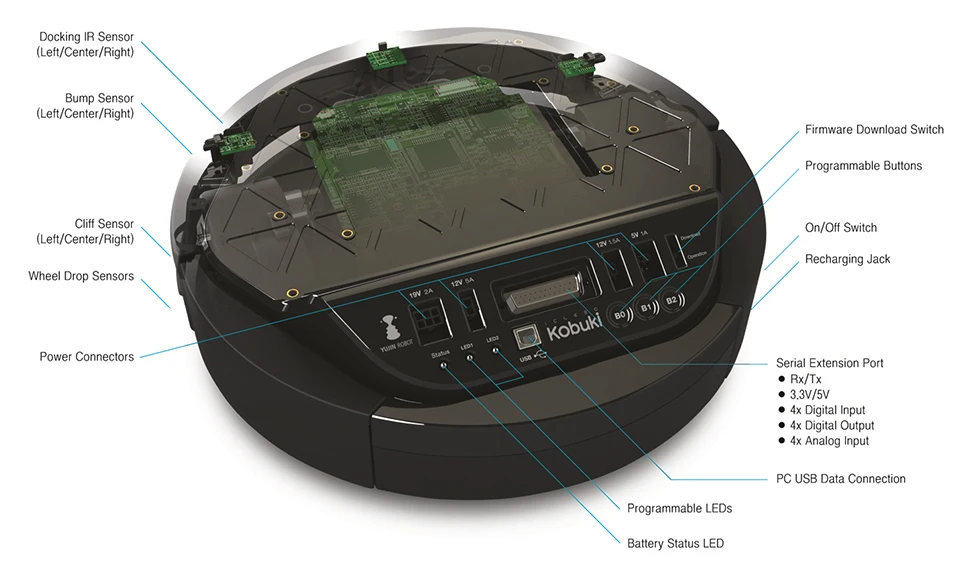


Kobuki параметры конфигурации:
Особенности
-Максимальная скорость перевода: 70 см/с
-Максимальная скорость вращения: 180 градусов/сек (> 110 °/С Производительность гироскопа уменьшится)
-Полезная нагрузка: 5 кг (твердый пол), 4 кг (на ковре)
-Обнаружение подвешивания: не упадет с высоты более 5 см
-Порог скалолазания: порог скалолазания составляет 12 мм или ниже
-Лазание ковров: лазание ковров размером 12 мм или меньше
-Расчетное время работы: 3/7 часов (маленький/большой аккумулятор)
-Предполагаемое время зарядки: 1,5/2,6 часов (маленький/большой аккумулятор)
-Зарядный ворс: в районе 2 м х 5 м перед зарядным ворсом
-Зарядное устройство, напряжение: 18,6 В, ток: 3,16 А
Технические характеристики:
-Нижний компьютер: микроконтроллер STM32
-Производитель мотора: щеточный двигатель постоянного тока, Название детали: RP385-ST-2060
-Подключение к ПК: USB или через RX / TX pin на параллельном порту
-Обнаружение перегрузки двигателя: Отключите питание при обнаружении высокого тока (> 3a)
-Расстояние: 52 тика/enc rev, 2578,33 тиков/колесо rev, 11,7 тиков/мм
-Гироскоп: Заводская калибровка, 1 Ось (110 градусов/сек), Производитель: STMicroelectronics, Название детали: L3G4200D
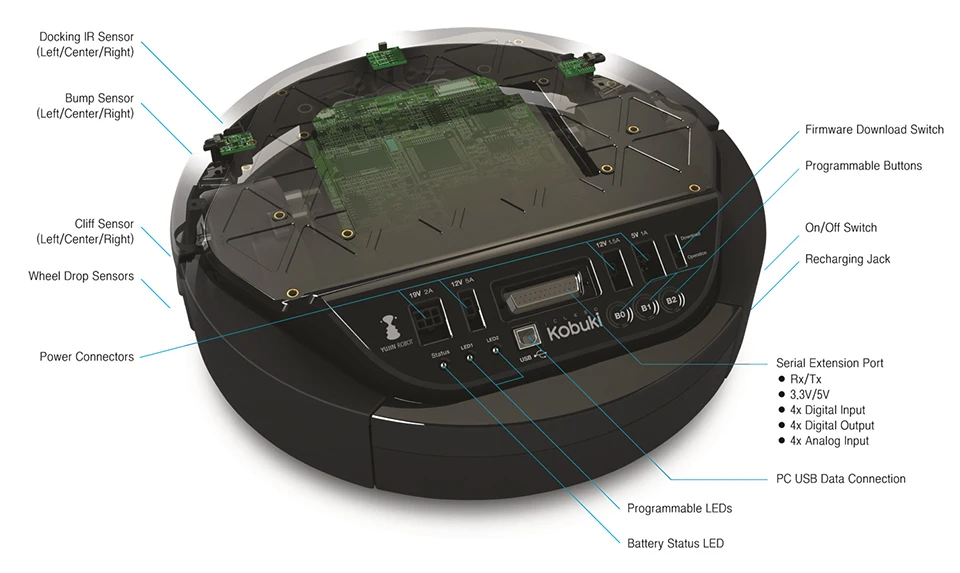
-Датчики столкновения: слева, по центру, справа
-Док инфракрасный приемник: левый, центральный, правый
-Датчики падения колес: левый и правый
-Датчик обрыва: слева, по центру, справа
-Разъем питания: 5V / 1A, 12V 1.5A, 12V / 5A
-Интерфейс расширения: 3,3 v / 1a, 5V / 1A, 4x4 x аналоговый, цифровой, 4 x цифровой выход
-Аудио: несколько программируемых звуковых сигналов
-Программируемый светодиод: 2 × двухцветный светодиод
-Индикатор состояния аккумулятора: 1 × двухцветный светодиод (зеленый высокий), оранжевый-низкий, зеленый, мигающий-зарядка]
-Кнопка: 3 × сенсорная кнопка
-Аккумулятор: литий-ионный, 14,8 в, 2200 мАч (4s1p маленький), (опция: 4400 4s2p-большой), (опция: 10400 4s4p-большой)
-Обновление прошивки: через USB
-Скорость передачи данных датчика: 50 Гц
-Адаптер для зарядного устройства: Вход 100-240 В переменного тока, 50 / 60 Гц, 1.5a Максимальная;
-Выход: 19v DC, 3.16A
-Разъем для зарядки нетбука (включается только при запуске робота) 19v, 2.1A DC
-Диаметр: 351,5 мм/высота: 124,8 мм/вес: 2,35 Кг (4s1p-small)
Область применения:
-Лично Создайте свой собственный робот
-Робот R & D и робот демонстрационное образование
-Для многофункциональных исследований робота
-Для обучения и изучения программного обеспечения с открытым исходным кодом
Населения:
-Для студентов, таких как Университетская автоматизация, электроника и компьютерное программное обеспечение студентов
-Персонал НИОКР
-Соответствующие учителя, технические Тренеры
-Робот энтузиастов
Особенности:
-Двигатель с высокоточным кодировщиком
-Литиевая батарея большой емкости
-Защита от падения
-Несколько вариантов дизайна блока питания
-Кнопка и светодиодный программируемый контроль
-Цифровой и аналоговый интерфейс ввода/вывода
-Можно выбрать аккумулятор двойной емкости и зарядную станцию
-Прошивка может быть обновлена
-C + + драйвер с открытым исходным кодом, который может поддерживать операционные системы Linux и Windows
-Поддержка рос
-Дизайн поддержки компании или семьи