




Заменить L298P для Arduino R3 Двухканальный драйвер двигателя постоянного тока Плата расширения L298NH модуль управляющий модуль MEGA2560 One 
259,38₽
В наличии!
Последнее обновление: 23.09.2024

Сменный Двухканальный драйвер двигателя постоянного тока L298P, щит...
251,27₽

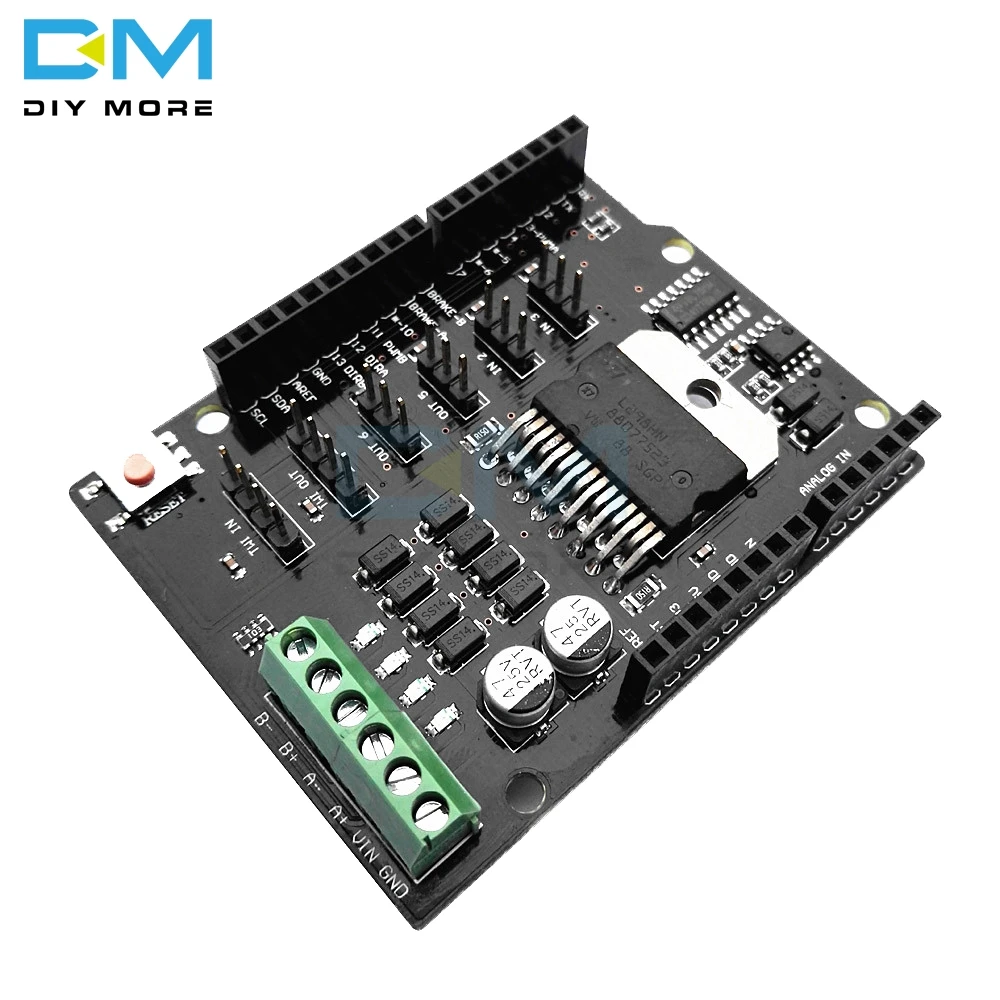
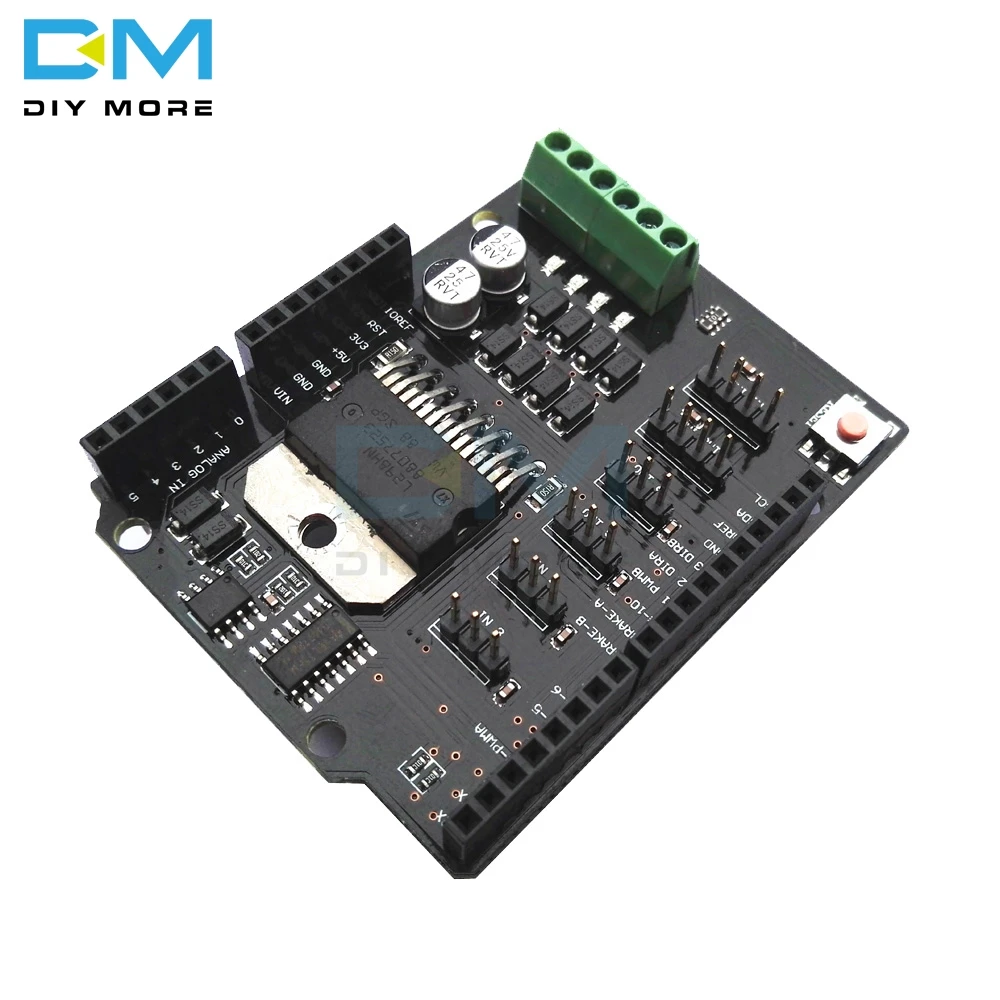
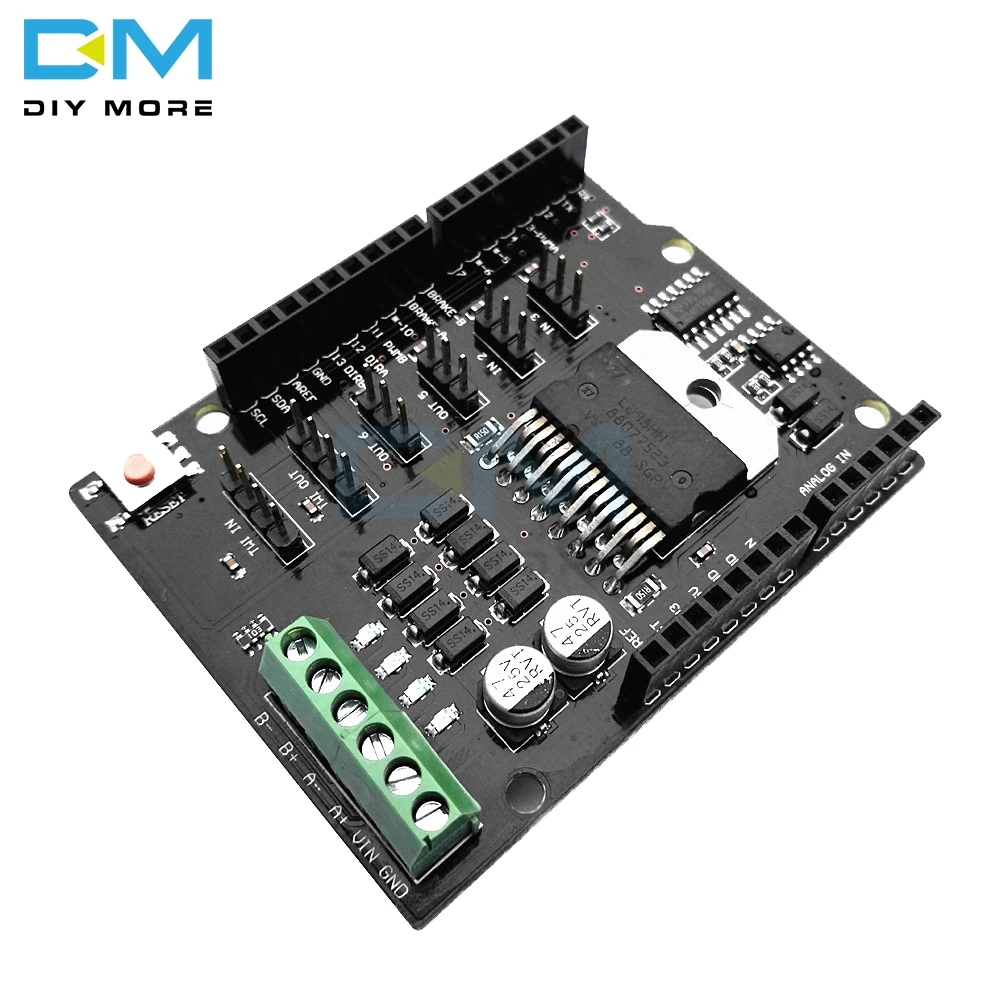
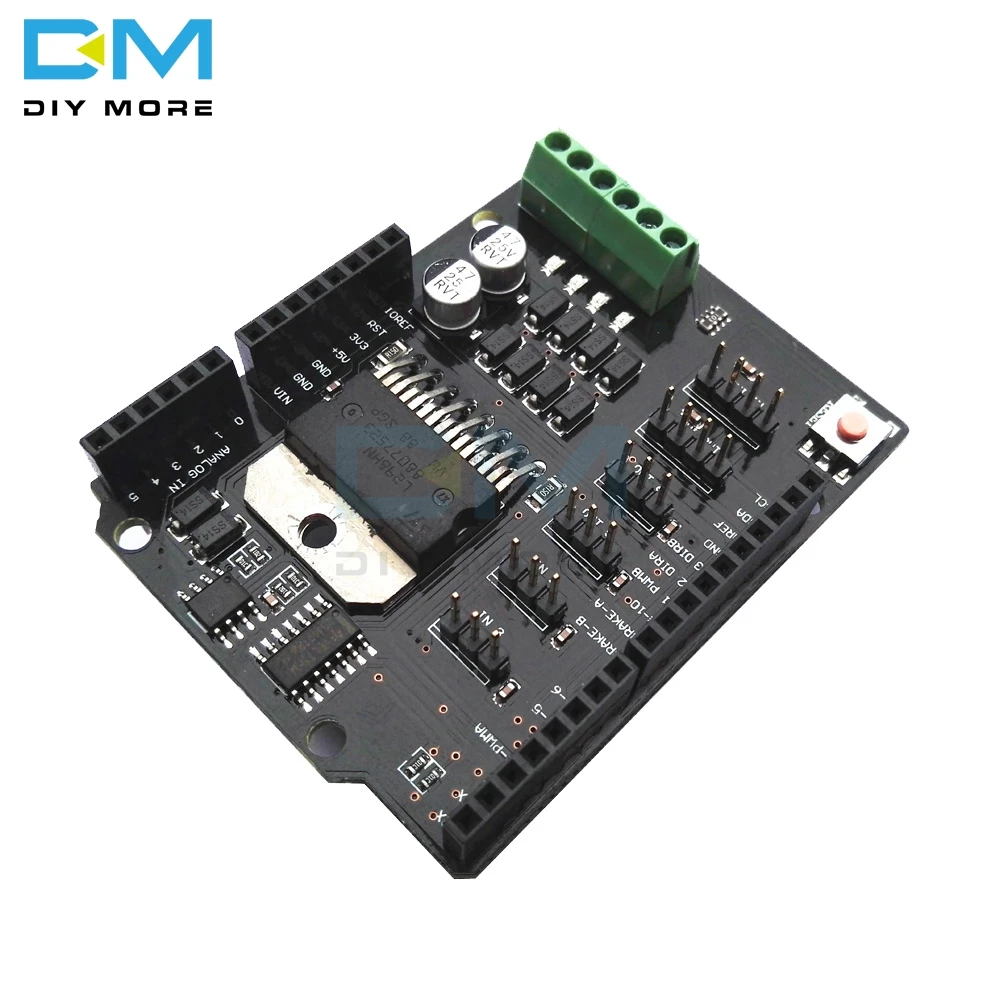
Щит двигателя основан на L298NH, который является двойным полномостовым драйвером, предназначенным для привода индуктивных нагрузок, таких как реле, соленоиды, DC и шаговые двигатели. Он позволяет управлять двумя двигателями постоянного тока с платой arduino, независимо контролируя скорость и направление каждого. Вы также можете измерить поглощение моторного тока каждого двигателя, среди прочего.
• В разделе «начало работы» вы можете найти всю информацию, необходимую для настройки платы, использовать программное обеспечение для arduino (IDE) и запустить повозку с кодированием и электроникой.
Технические характеристики
Рабочее напряжение 5 В до 12 В
Контроллер двигателя L298HN, привод 2 двигателя постоянного тока или 1 шаговый двигатель
Макс ток 2 а на канал или 4 А макс (с внешним источником питания)
Датчик тока 1,65 в/A
Бесплатно остановка хода и функция тормоза
Мощность
Экран двигателя должен питаться только от внешнего источника питания. Поскольку L298HN IC, установленный на экране, имеет два отдельных разъема питания: один для логики и один для драйвера источника питания двигателя. Необходимый ток двигателя часто превышает максимальный номинальный ток USB.
Внешнее (без USB) Питание может поступать либо от адаптера переменного тока в постоянный ток (настенный) или от аккумулятора. Адаптер можно подключить, подключив Центрально-положительный штекер 2,1 мм к разъему питания платы arduino, на котором установлен экран двигателя, или подключив провода, ведущие к источнику питания Vin. И винтовые клеммы GND, соблюдайте поляризацию.
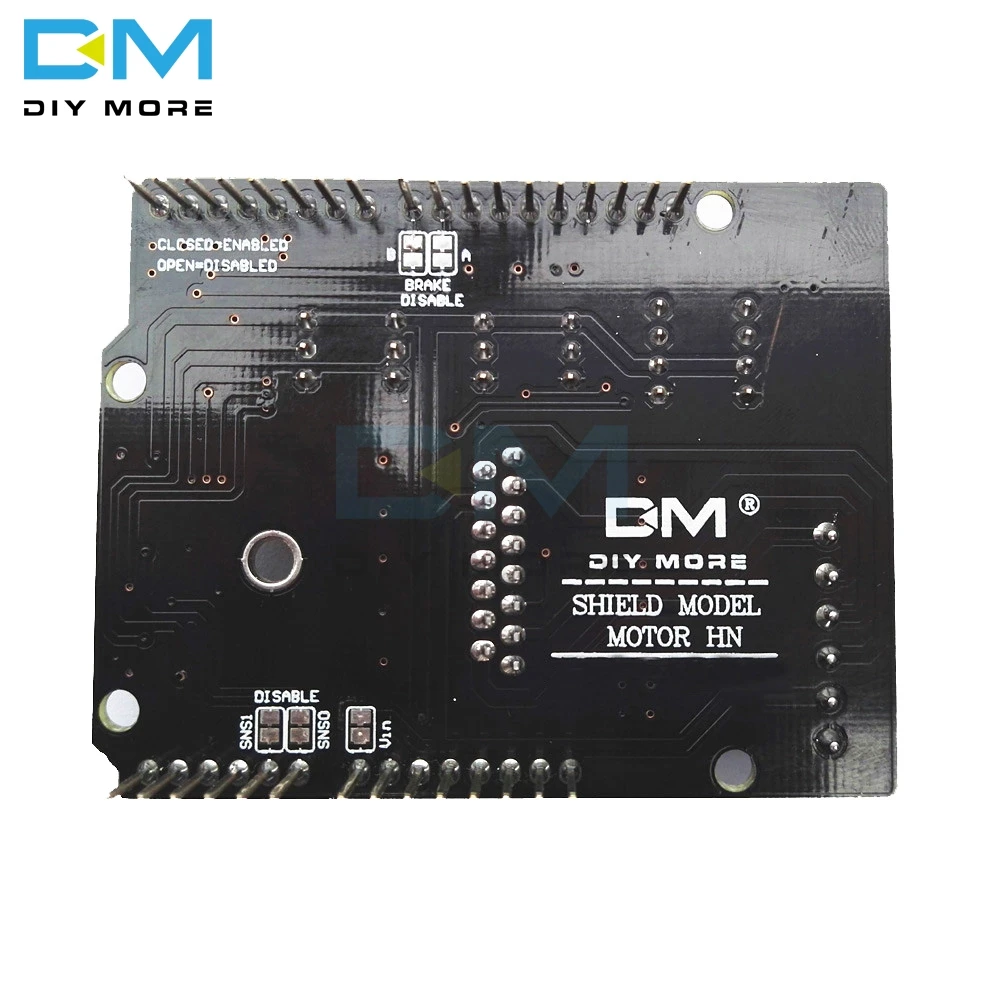
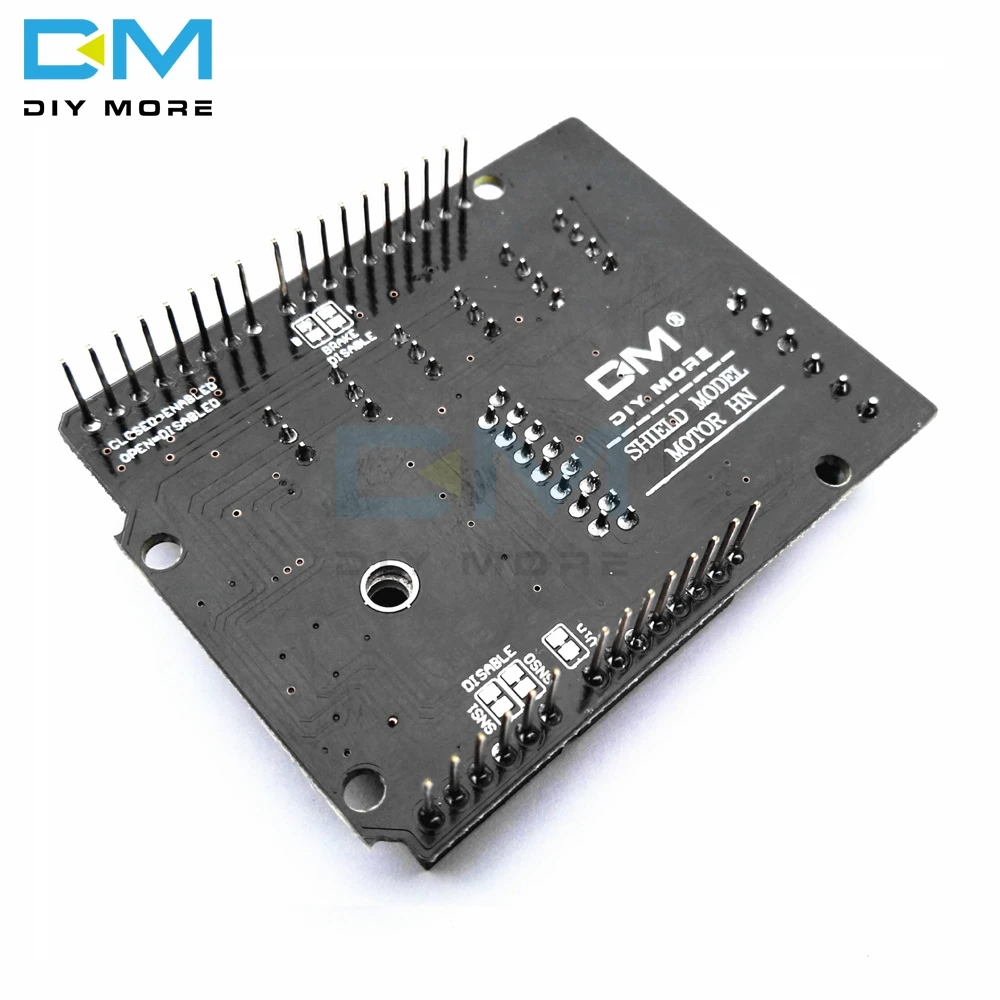
Чтобы избежать возможного повреждения платы arduino, на которой установлен экран, мы рекомендуем использовать внешний источник питания, который обеспечивает напряжение от 7 до 12 В. Если вашему двигателю требуется напряжение более 9 В, мы рекомендуем вам разделить линии электропитания экрана и плату arduino, на которой установлен экран. Это возможно, разрезав перемычку Vin Connect на задней стороне экрана. Абсолютный предел для Vin на винтовых клеммах составляет 18 В.
Экран может обеспечивать 2 Ампера на канал, максимум для 4 ампер.
Вход и выход
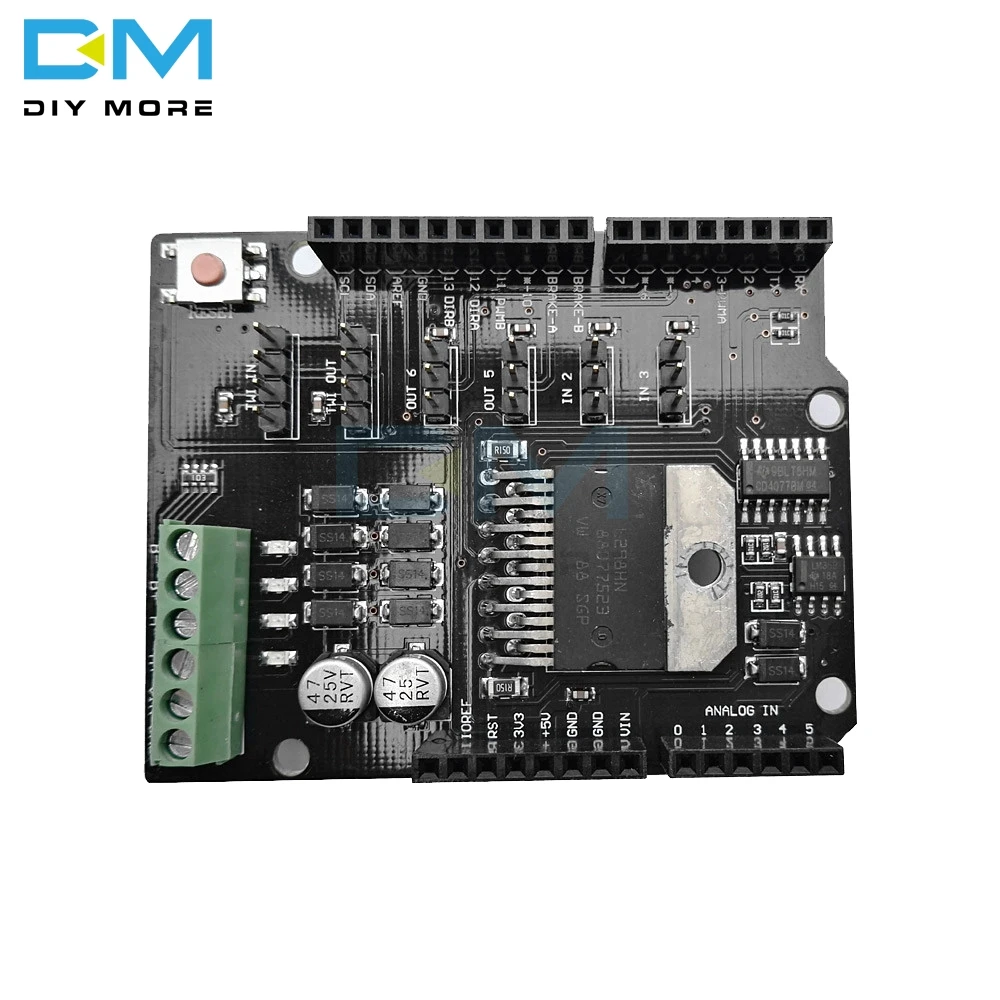
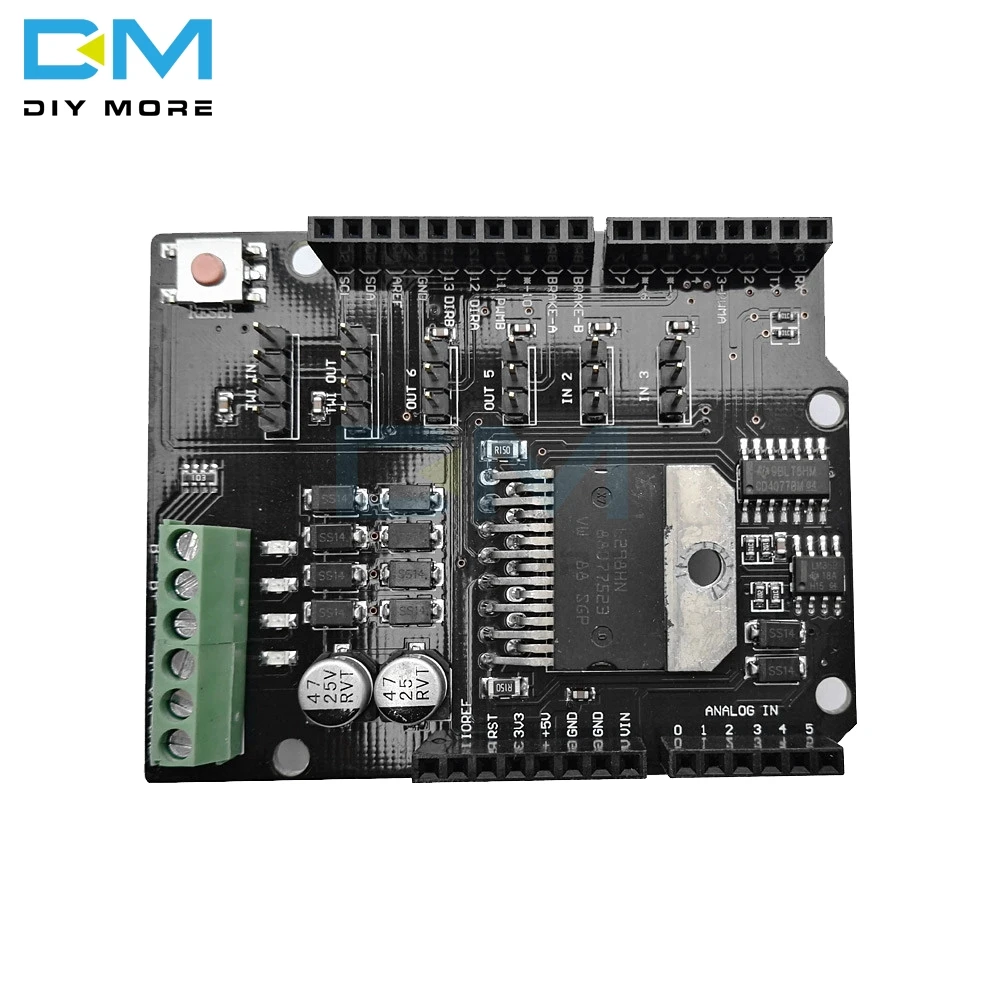
Этот экран имеет два отдельных канала, называемые A и B, каждый использует 4 контакта для arduino для управления или определения двигателя. Всего на этом экране 8 контактов. Вы можете использовать каждый канал отдельно для привода двух двигателей постоянного тока или комбинировать их для привода одного биполярного шагового двигателя. Контакты экрана, разделенные по каналам, показаны в таблице ниже:
Функциональные контакты на Ch. Apins per Ch. Б
DirectionD12D13
PWMD3D11
BrakeD9D8
Датчик тока a0 A1
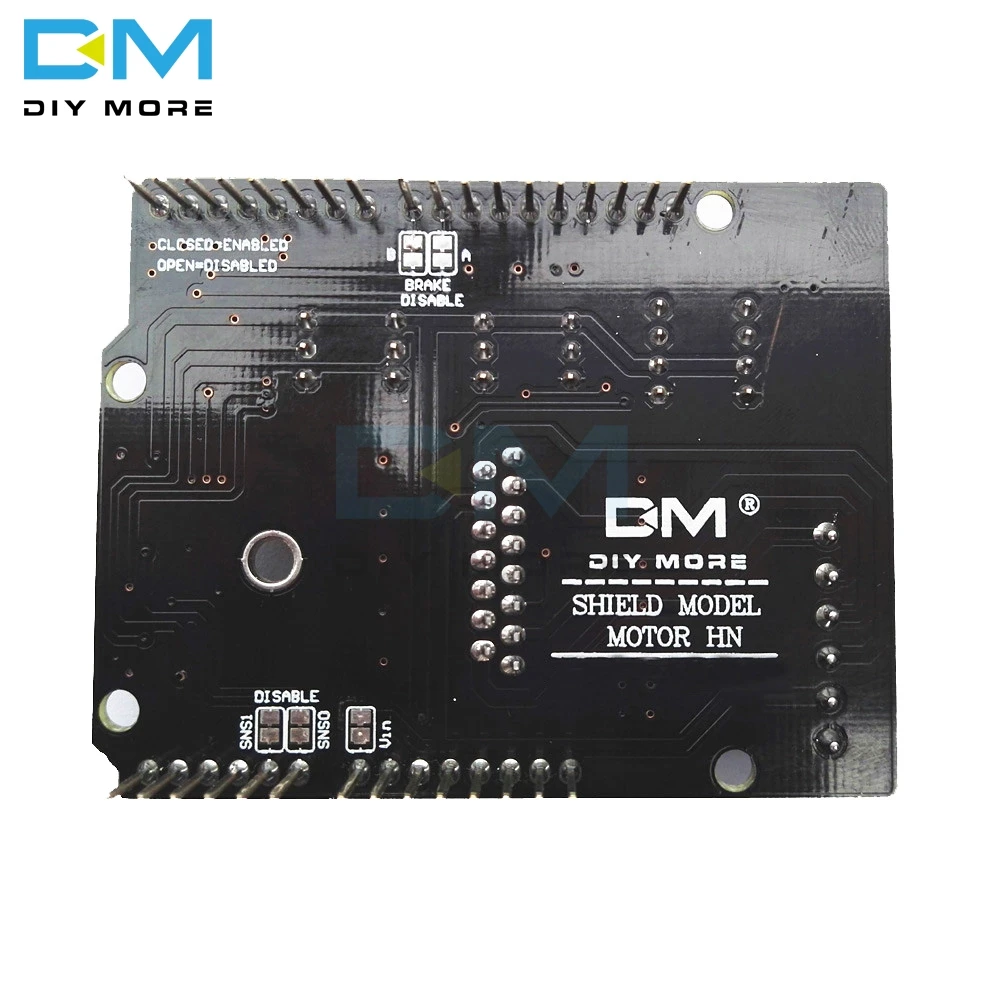
Если вам не нужен тормоз и датчик тока, а также вам нужно больше штифтов для вашего приложения, вы можете отключить эту функцию, обрезав соответствующие перемычки на задней стороне экрана.
Подключение двигателя
Щеточный двигатель постоянного тока. Вы можете управлять двумя щеточными двигателями постоянного тока, подключив два провода каждого в (+) и (-) винтовых клеммах для каждого канала A и B. Таким образом, вы можете управлять его направлением, установив высокие или низкие контакты DIR A и DIR B, вы можете контролировать скорость, меняя значения рабочего цикла PWM A и PWM B. Тормоза A и тормоза B, если они установлены высоко, будут эффективно тормозить двигатели постоянного тока, а не позволить им замедлить, уменьшая мощность. Вы можете измерить ток, идущий через двигатель постоянного тока, считывая контакты SNS0 и sns1. На каждом канале будет напряжение, пропорциональное измеренному току, которое можно считывать как обычный аналоговый вход, через функцию аналогичного () на аналоговом входе A0 и A1. Для Вашего удобства Он калибруется до 3,3 В, когда канал подает максимальный возможный ток, то есть 2 А.
Посылка
1 x L298NH двухканальная плата драйвера двигателя постоянного тока



Отзывы покупателей
Покупатель
Страна: BE Доставка: Saver Shipping 15.12.2022
Супер Трис Рапид
P***t
Страна: DE Доставка: Cainiao Super Economy 04.12.2022
Быстрая доставка.