


Модуль платы драйвера L298N для шагового двигателя, умный автомобильный робот, макетная плата Пельтье высокой мощности 10 шт. 
Последнее обновление: 08.04.2022

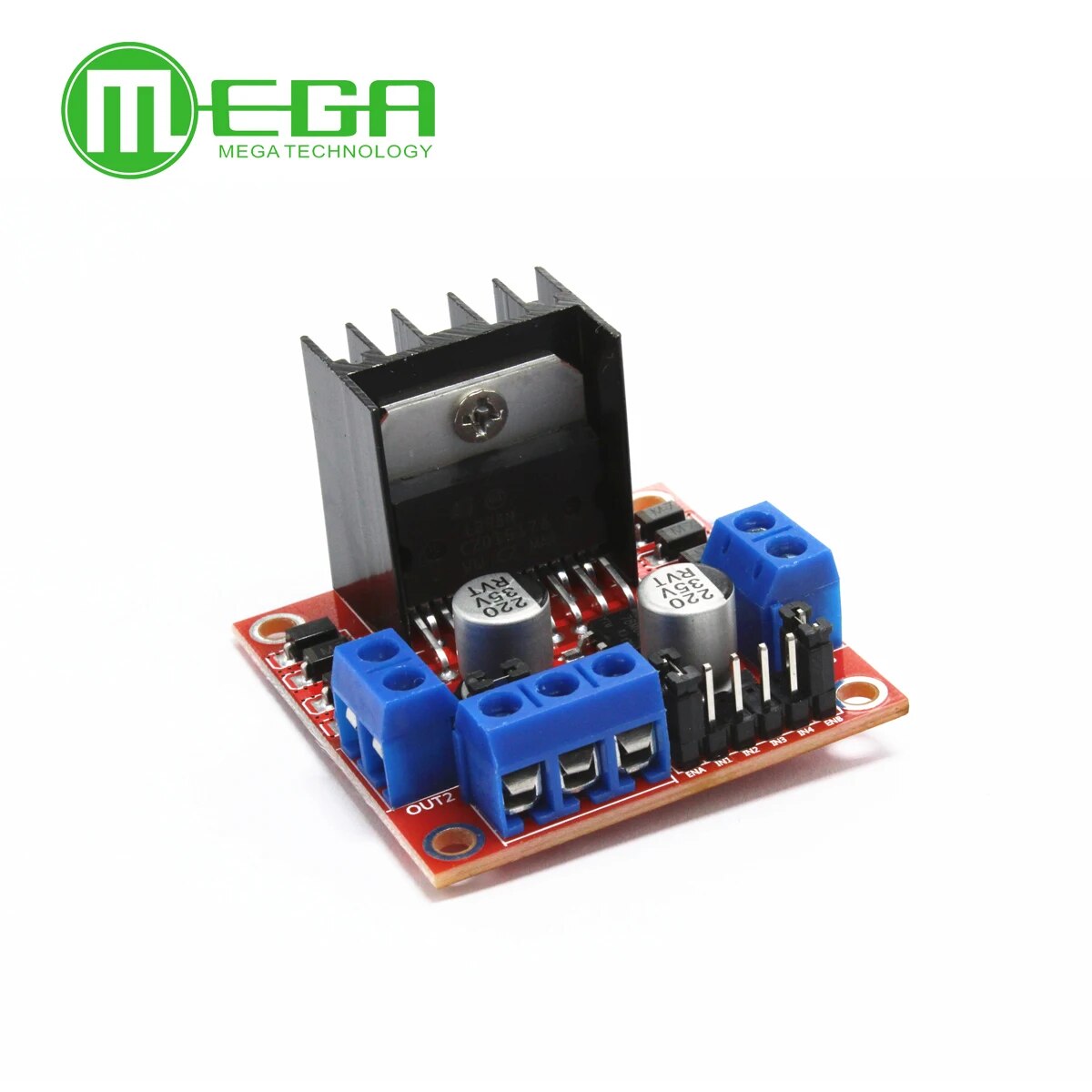
Советы по использованию дисковых модулейОбласть применения модуля драйвераL298N-это ST компания, производящая высоковольтные высокоточные чипы драйвера двигателя. Чип использует 15-контакпосылка ВКУ. Основными особенностями являются: высокое рабочее напряжение, Максимальное рабочее напряжение до 46В; Выходной ток мгновенный пиковый ток до 3а непрерывный рабочий ток 2А; Номинальная мощность 25 Вт. Содержит два H-мостовых высоковольтных и высоковольтных полномостовых драйвера можно использовать для привода двигателя постоянного тока и шагового двигателя, индуктивной нагрузки катушки реле; С помощью стандартного управления сигналом логического уровня; имея два разрешенных конца управления, позволяют или запрещают работу, имеет входной терминал источника питания логического устройства, В чехол независимо от входного сигнала воздействуют на внутреннюю логическую часть цепи для работы при низком напряжении; Может быть внешним сенсорным резистором, количеством изменения отзывы на цепь управления. Чип-привод L298N, чип может управлять двухфазным шаговым двигателем s или четырехфазным шаговым двигателем может управлять двумя двигателями постоянного тока.
Описание/ПримечаниеТаблица функций порта
Схема схемы цепи
В этот модуль встроен встроенный источник питания 5 В. Когда вы управляете напряжением 7 В-35 В, может встроенный логический источник 5 В, не входное напряжение при использовании встроенного источника питания 5 В, интерфейс питания + 5 В, но приводит к напряжению 5 В для наружного использованияКогда ENA so IN1 IN2 контроллер OUT1 OUT2Когда ENB so IN3 IN4 контроллер OUT3 OUT4
Примеры приложений1: приводной шаговый двигательОбычное 4-проводное 2-фазное подключение двигателя, как показано на рисункеВключить ENBОт IN1 - IN4 введите следующее время привода, вы можете контролировать скорость и направление шагового двигателя
2: приводной двигатель постоянного токаЭтот модуль представляет собой 2-канальный драйвер H-bridge может управлять двумя двигателями одновременно, соединение показано на рисункеТак же как и Эна ЭНБСоответственно, от скорости и направления входа к сигналу PWM, ведущему Мотор 1 на IN1 IN2ШИМ-сигнал скорости и направления приводного двигателя 2 может быть соответственно от входа IN3 IN4Сигнал как показано

Отзывы покупателей
Страна: RU Доставка: Standard Shipping 03.11.2021
Работает