






Последнее обновление: 10.09.2024
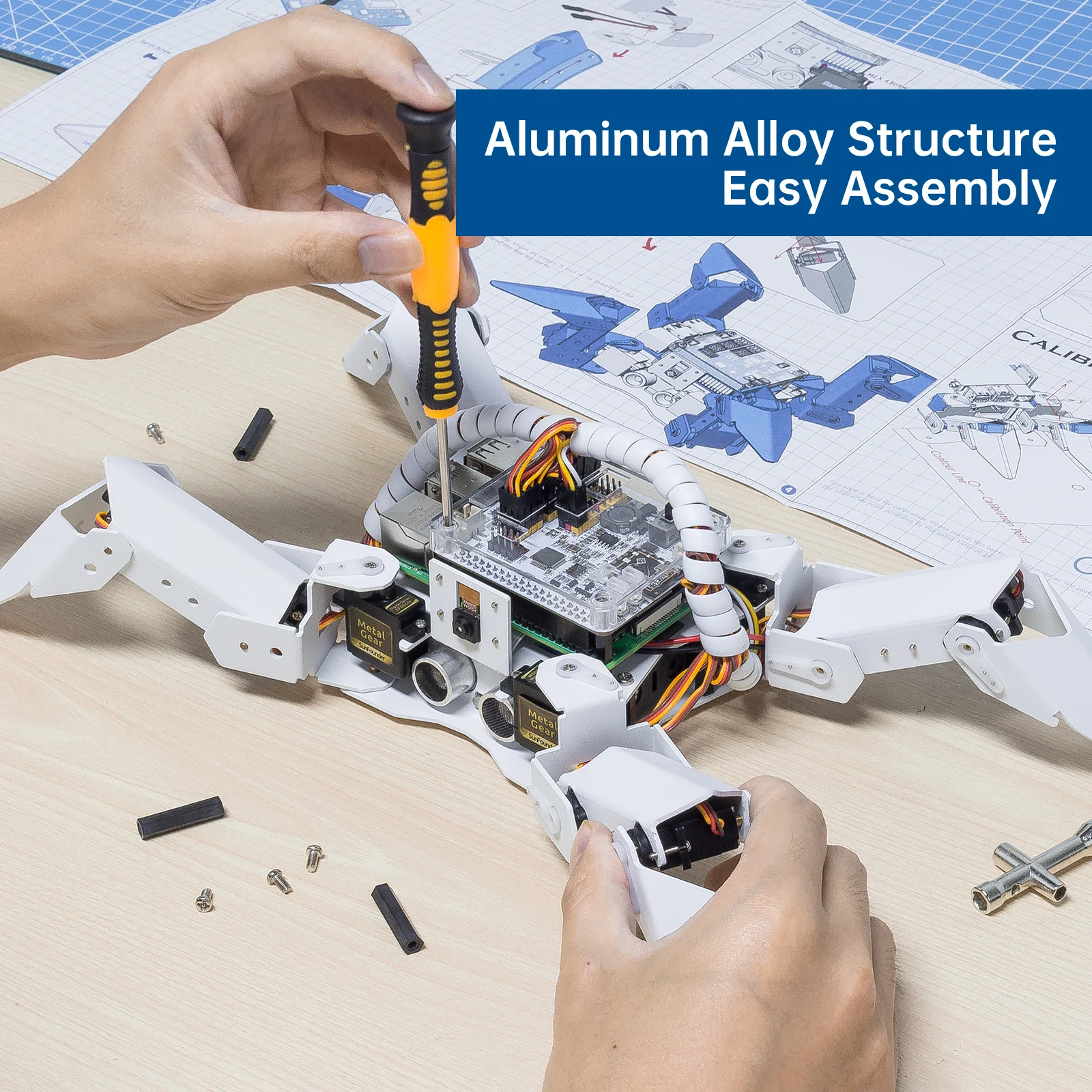
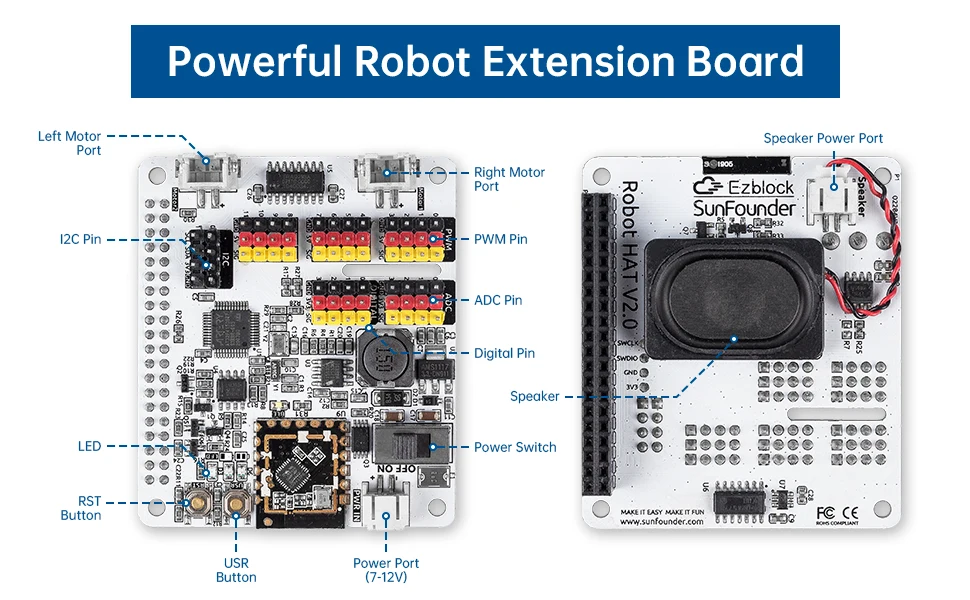 Robot HAT-это многофункциональная Расширительная доска, которая позволяет Raspberry Pi быстро стать роботом. Это Имеет 12 штифтов PWM, 4 контакта ADC, 4 цифровых штифта и 2 штифта двигателя. Шляпа робота также поставляется с Динамик, Который может использоваться для воспроизведения фоновой музыки, звуковых эффектов и реализации TTS Функции, чтобы сделать ваш проект более интересным. Для получения дополнительной информации, пожалуйста, обратитесь к Robot-hat.rtfd.io.
Robot HAT-это многофункциональная Расширительная доска, которая позволяет Raspberry Pi быстро стать роботом. Это Имеет 12 штифтов PWM, 4 контакта ADC, 4 цифровых штифта и 2 штифта двигателя. Шляпа робота также поставляется с Динамик, Который может использоваться для воспроизведения фоновой музыки, звуковых эффектов и реализации TTS Функции, чтобы сделать ваш проект более интересным. Для получения дополнительной информации, пожалуйста, обратитесь к Robot-hat.rtfd.io.



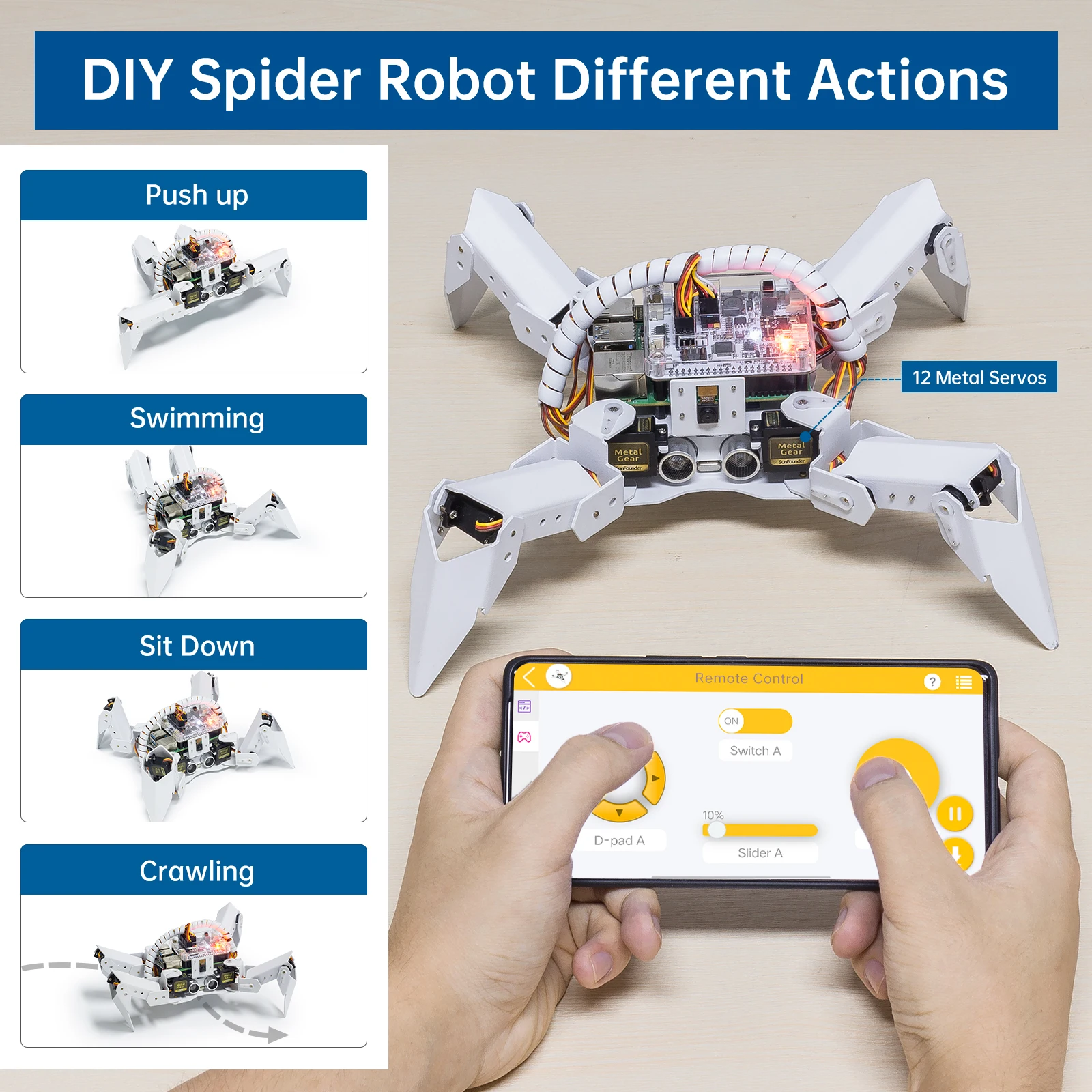
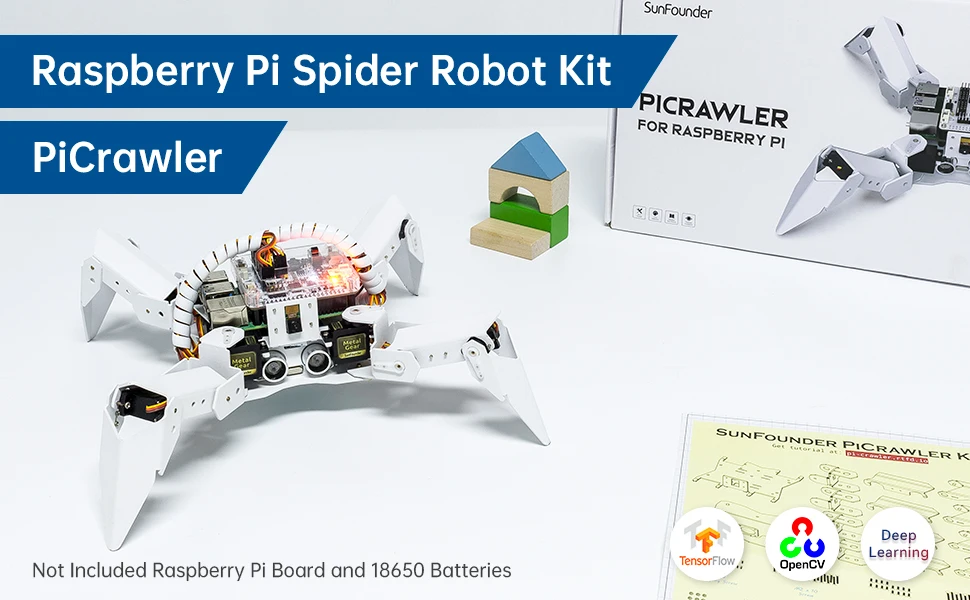
Этот набор роботов-пауков Raspberry Pi имеет много функций обнаружения объектов, и после добавления некоторых алгоритмов он может следовать с помощью объекта, например, вы можете позволить автомобилю следовать с мячом.
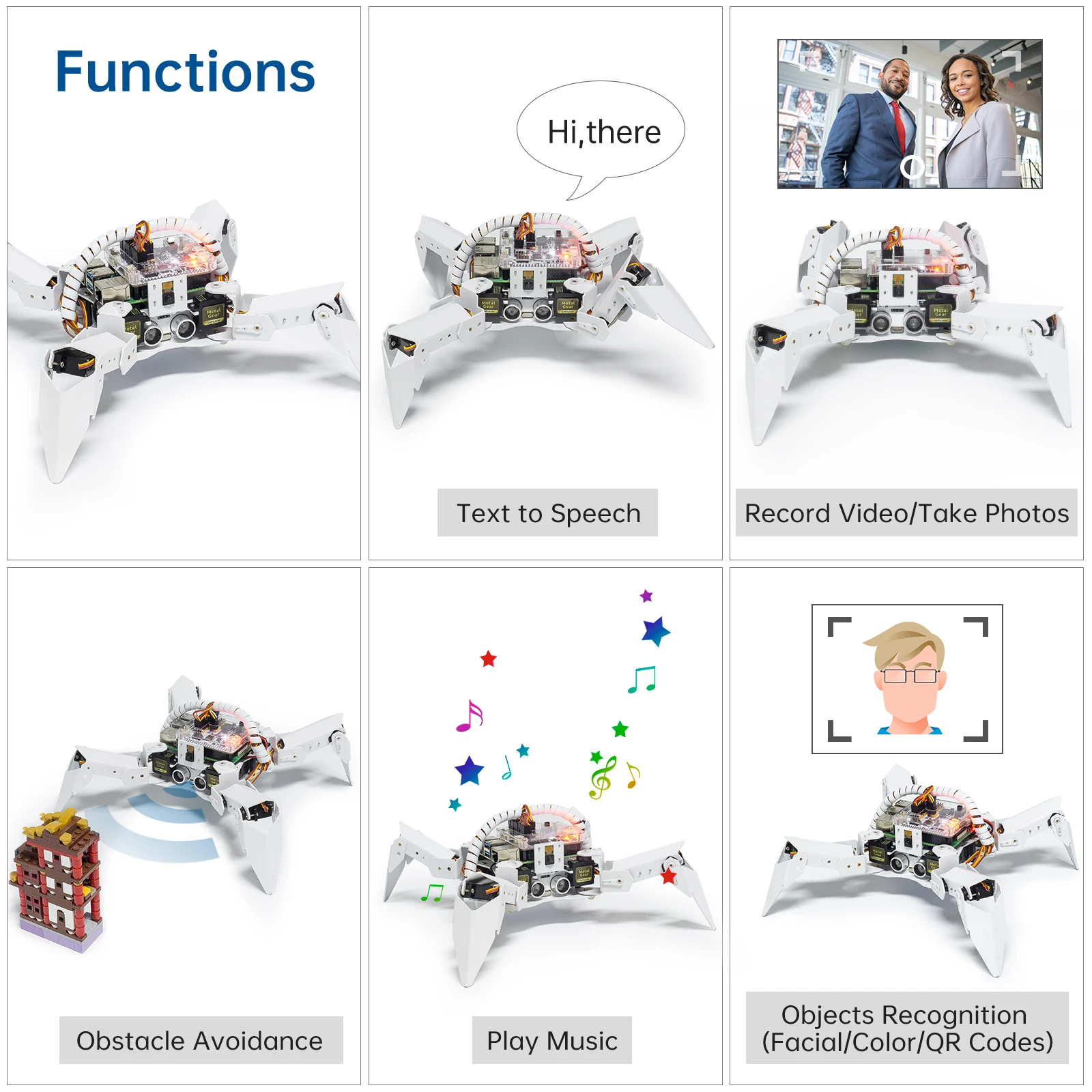
PiCrawler может отдельно реализовывать функции обнаружения цвета, лица и qr-кодов. Примечание: только один цвет может быть обнаружен в течение одного времени (поддержка красного, оранжевого, желтого, зеленого, синего, фиолетового)
У PiCrawler есть ультразвуковой датчик, который используется для таких экспериментов, как предотвращение препятствий. Значение расстояния можно считывать с помощью ваших устройств.



Динамик уже вставлен в шляпу робота для реализации TTS (текст в речь), звукового эффекта, фоновой музыки, которая приносит вам хорошее настроение и т. Д. Вы можете развивать забавное взаимодействие с этой функцией. Например, программируемое текстовое сообщение «привет», чтобы играть, когда он увидел ваших друзей. В режиме «камера» и «Музыка» робот-паук имеет ощущение науки и техники.
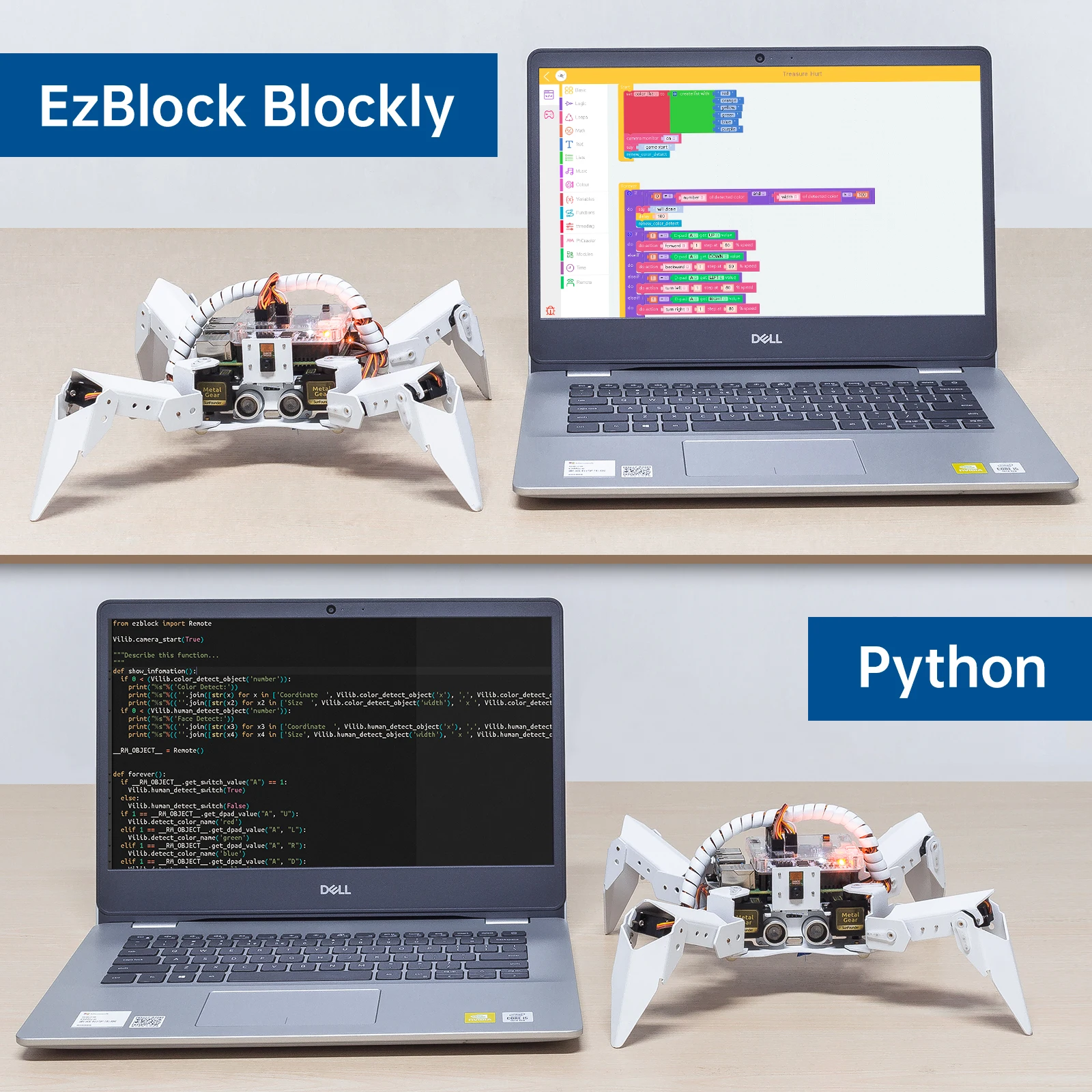
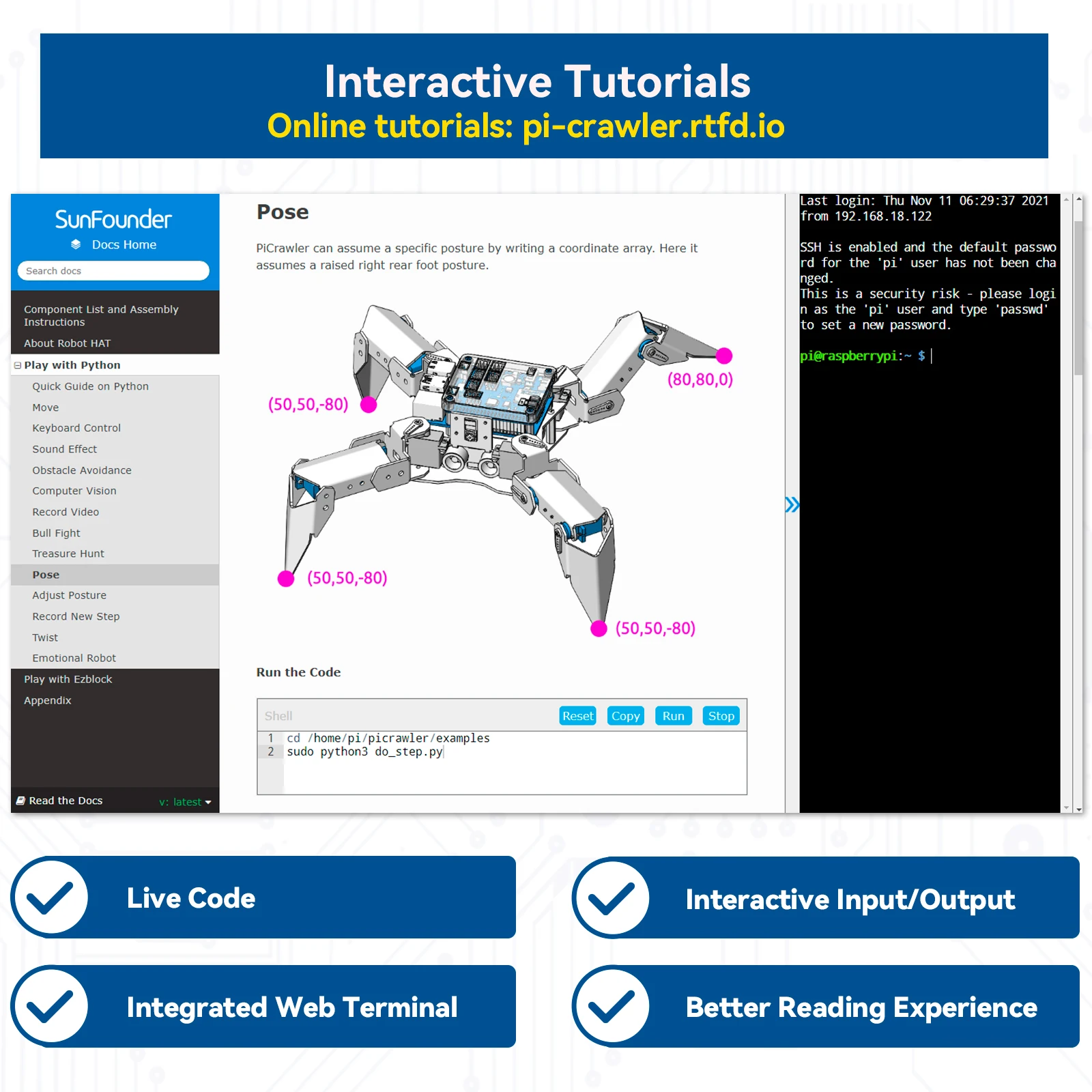
PiCrawler поможет вам ухватиться за навыки блочной программы Python. Он поставляется с бесплатным приложением EzBlock Studio, совместимым с IOS, Android, телефоном и планшетом. Изучите навыки кодирования на основе блоков, развивая навыки критического мышления.
Вы можете записывать или снимать видео с камеры PiCrawler. Отслеживание объектов в реальном времени в визуальном диапазоне, отправка обратно данных позиционирования. Все данные видны в Интернете/приложении, поэтому вы даже можете использовать их для глубоких исследований и экспериментов!