





Последнее обновление: 03.03.2022

Спецификации FC
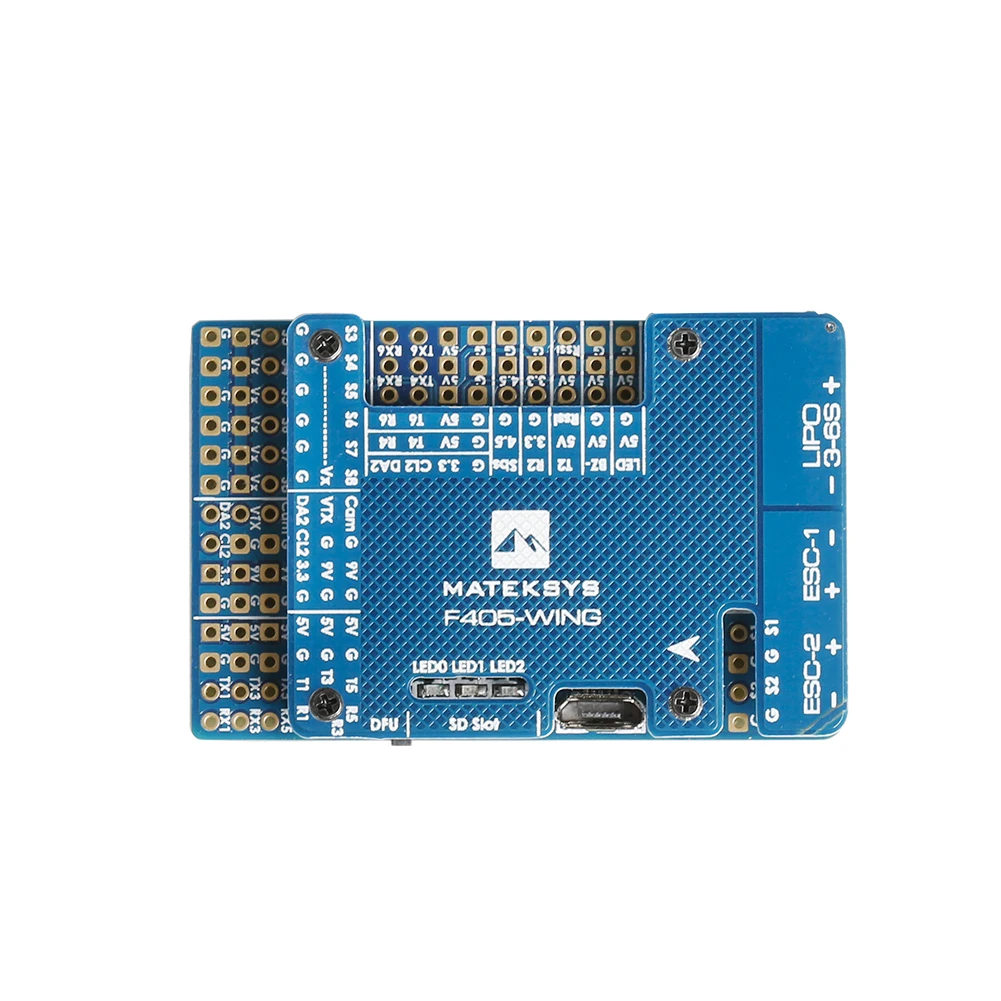
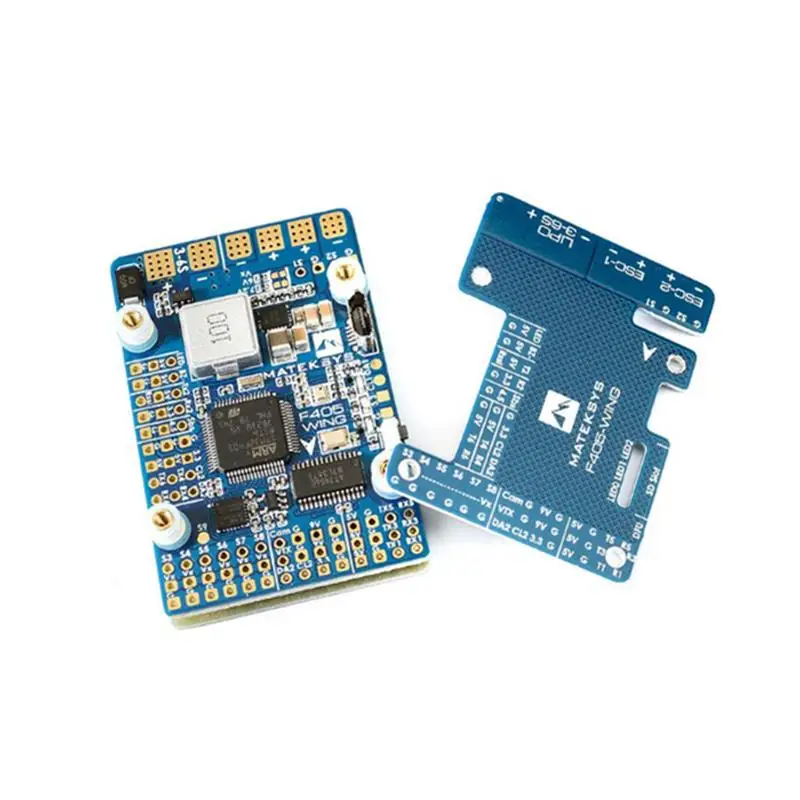
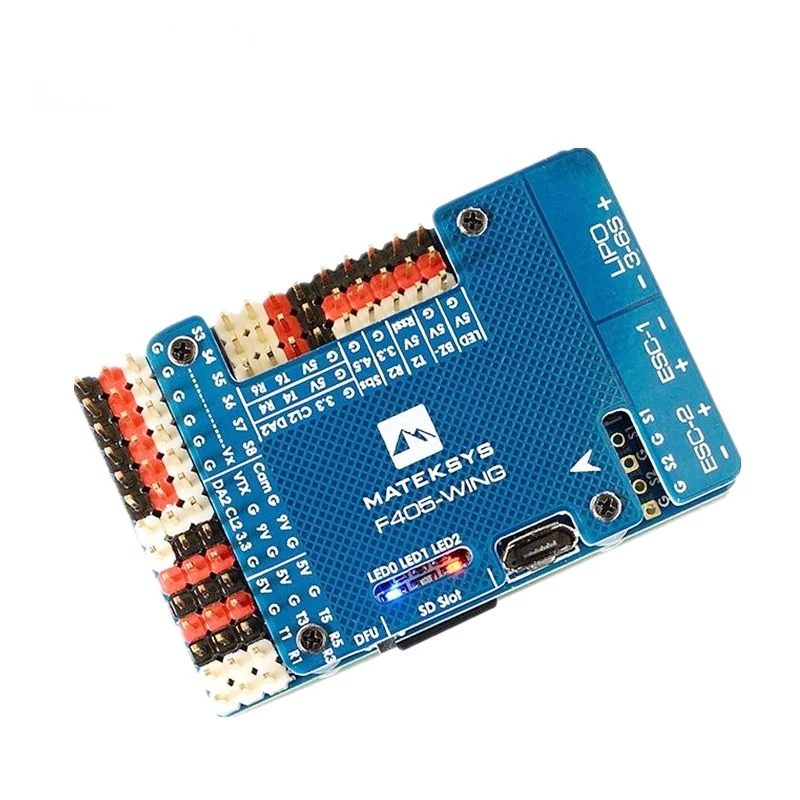
MCU: 168 МГц STM32F405 IMU: MPU6000 акселерометр/гироскоп (SPI) Баро: BMP280 (I2C) OSD: INAV OSD w/ AT7456E чип Черный ящик: слот для карты MicroSD (SD/SDHC) VCP & 6x UARTs 2x двигатели, 7x выходы сервопривода 2x I2C 3x светодиодов для FC статус (синий, красный) и 3,3 V Индикатор (красный) Встроенный инвертор для ввода SBUS (UART2-RX) PPM/UART общий: UART2-RX SoftSerial on TX2 pad Датчик напряжения батареи: 1:10 (масштаб 1100) WS2812 Светодиодная лента: Да Бипер: Да RSSI: ДаПрошивка FC
Полёт INAV Цель: MATEKF405SEPDB
Диапазон входного напряжения: 9 ~ 30 В (3 ~ 6S LiPo) с защитой телевизоров 2x электроколодки ESC Датчик тока: 104A, 3,3 V ADC, масштаб 317Выход BEC 5V
Предназначен для полетного контроллера, приемника, OSD, камеры, зуммера, 2812 LED_Strip, зуммера, gps-модуля, скорости полета Непрерывный ток: 2 А, Макс. 3 АBEC 9 В/12V Выход
Предназначен для видеопередатчика, камеры, карданного шарнира и т. Д. Непрерывный ток: 2 А, Макс. 3 А 12 В вариант с перемычкойВыход BEC Vx
Предназначен для сервоприводов Напряжение Регулируемый 5V по умолчанию, 6V или 7,2 V через перемычки Непрерывный ток: 5 ампер, Макс. 6А Выходная пульсация: 50 мВ (VIn = 24 В, VOut = 5 в @ 5A нагрузки)BEC 3,3 V выход
Предназначен для модуля Баро/компаса и speedtrum RX Линейный регулятор Непрерывный ток: 500 мАФизический
Крепление: 30,5x30,5 мм, Φ4мм с люверсами Φ3мм Размеры: 56x36x13 мм Вес: 25 г