



Последнее обновление: 16.03.2022

PWM
Pad
Именной
Тим
INAV многомоторный двигатель
INAV самолет
BetaFlight многомоторный двигатель
S1
PB7
TIM4_CH2
Мотор
Мотор
Мотор
S2
PB6
TIM4_CH1
Мотор
Мотор
Мотор
S3
PB0
TIM3_CH3
Мотор
Сервопривод
Мотор
S4
PB1
TIM3_CH4
Мотор
Сервопривод
Мотор
S5
PC8
TIM8_CH3
Мотор
Сервопривод
Мотор
S6
PC9
TIM8_CH4
Мотор
Сервопривод
Мотор
S7
PB14
TIM12_CH1
Сервопривод
Сервопривод
Двигатель,Нет DShot
S8
PB15
TIM12_CH2
Сервопривод
Сервопривод
Двигатель,Нет DShot
S9
PA8
TIM1_CH1
Сервопривод
Сервопривод
Мотор
Светодиодные лампы
PA15
TIM2_CH1
2812LED
2812LED
2812LED
АЦП
Без подкладки1K:10K разделитель0 ~ 36 В вход
На борту напряжение аккумуляторной батареи
INAV весы 1100BataFlight весы 110
Без подкладки0 ~ 3,3 V
На борту Датчик тока
Sacle 179
RSSI Pad0 ~ 3,3 V
Аналоговый RSSI
I2C
DA2 CL2
I2C2
Магнитометр (HMC5883 /MAG3110 /QMC5883 /IST8310)
DA2 CL2
I2C2
Скорость движения воздуха (MS4525)
DA1 CL1
I2C1
OLED 0,96 ″
DA1 CL1
I2C1
Внешний барометр MS5611
I2C1
На борту барометр DPS310
UART
TX1 RX1
UART1
Bluetooth
TX2 RX2
UART2
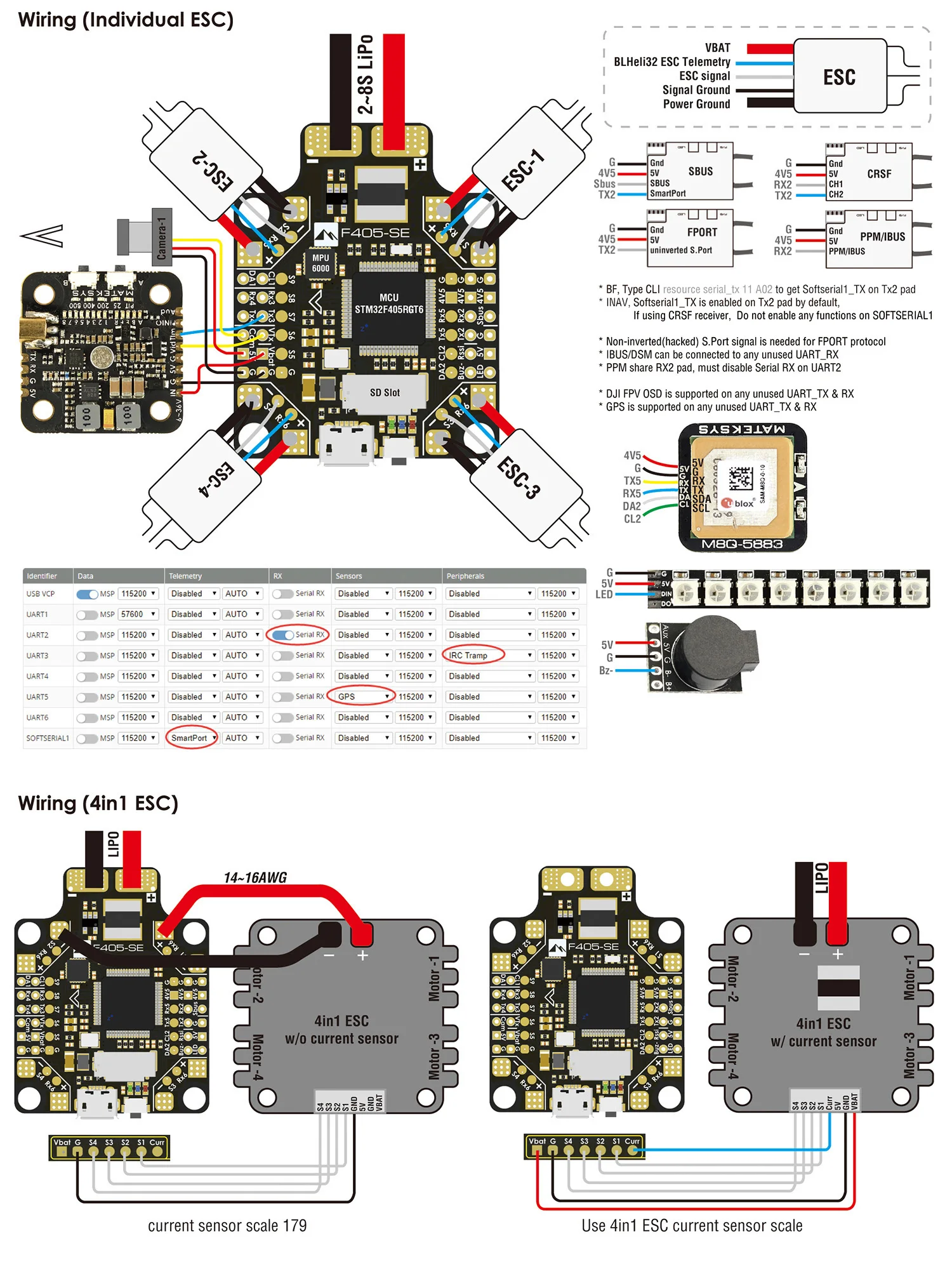
Приемник (CrossFire)
RX2
UART2
Приемник (IBUS, Spektrum DSM/SRXL , SUMD)
RX2
Приемник PPM (отключение последовательного RX на UART2)
Sbus
UART2
Приемник SBUS, встроенный инвертор на UART2-RX
TX2
Softserial1_TX
Frsky SmartPort
TX3 RX3
UART3
DJI FPV OSD
TX3
UART3
Контроль VTX CMS (SA, TR)
TX4 RX4
UART4
Запасные части
TX5 RX5
UART5
GPS
RX6
UART6
ESC телеметрии
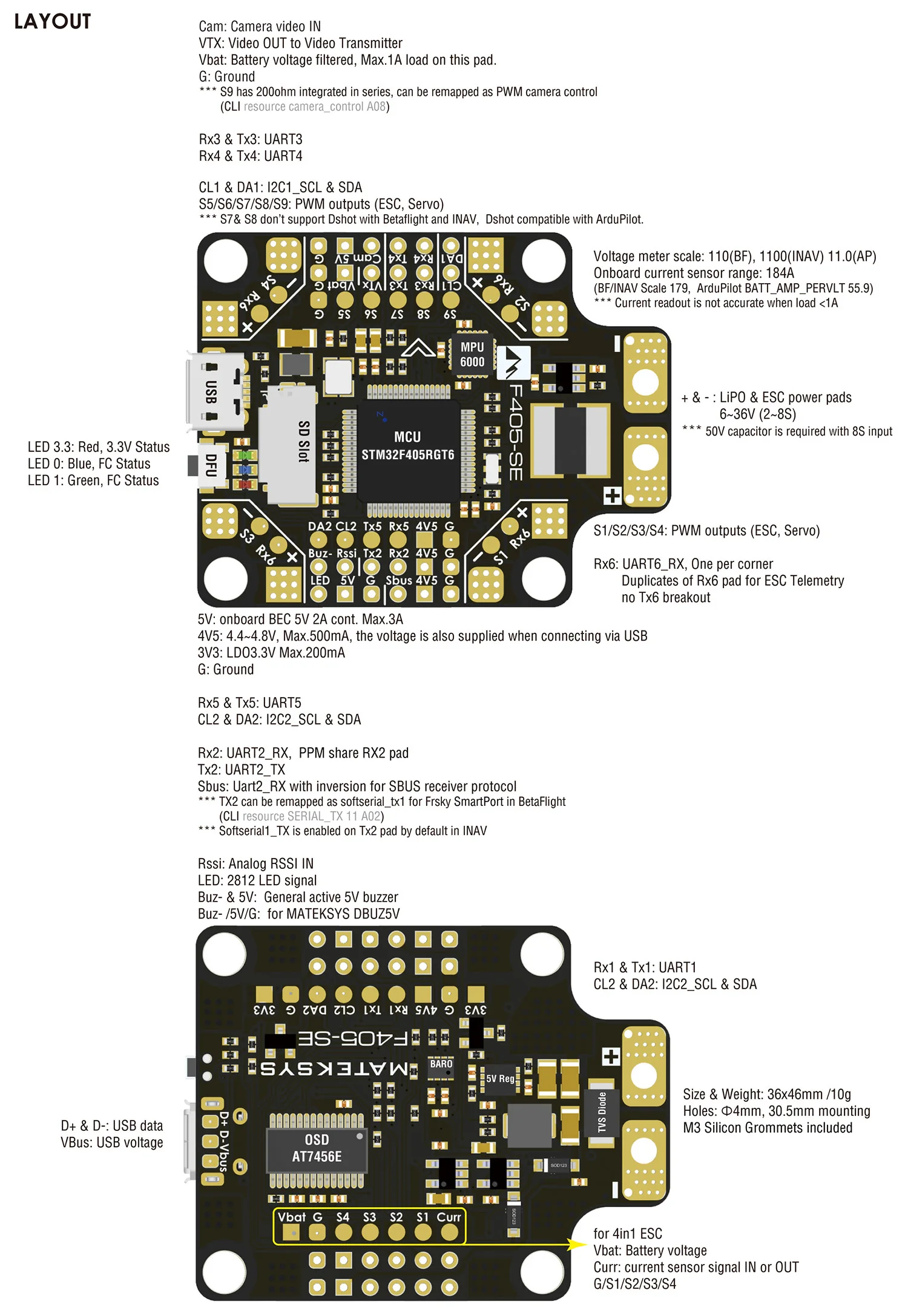
BetaFlightRemap S9 как PWM Управление камерой
Ресурс camera_control A08
Управление PWM камерой не 100% работает с каждой камерой из-за допуска напряжения камеры.
Remap TX2 как Softserial1_TX
Ресурс serial_tx 11 A02
Remap S7/S8 как сервоприводы
Ресурс SERVO 1 B14
Ресурс SERVO 2 B15
S1 ~ S9 и LED имеют возможность Dshot и PWM. Однако смешивание Dshot и нормальная работа ШИМ для выходов ограничена на группы, т. Е. Включение Dshot для вывода в группе требует, чтобы все выходы этой группы были настроены и использованы в качестве Dshot, а не PWM-выходов.
Если сервопривод и двигатель смешиваются в одной и той же группе, убедитесь, что эта группа работает с самой низкой частотой ШИМ в соответствии со спецификацией сервопривода. Ie. Сервопривод поддерживает Макс. 50 Гц, ESC должен работать на 50 Гц в этой группе.
S1
PWM1 GPIO50
PB7 TIM4_CH2
Group1
S2
PWM2 GPIO51
PB6 TIM4_CH1
S3
PWM3 GPIO52
PB0 TIM3_CH3
Group2
S4
PWM4 GPIO53
PB1 TIM3_CH4
S5
PWM5 GPIO54
PC8 TIM8_CH3
Gourp3
S6
PWM6 GPIO55
PC9 TIM8_CH4
S7
PWM7 GPIO56
PB14 TIM1_CH2N
Gourp4
S8
PWM8 GPIO57
PB15 TIM1_CH3N
S9
PWM9 GPIO58
PA8 TIM1_CH1
Gourp4
Светодиодные лампы
PWM10 GPIO59
PA15 TIM2_CH1
Gourp5
Servo10 _ функция 120, neopneopixel
АЦП
Без подкладки1K:10K разделитель0 ~ 36 В вход
На борту напряжение аккумуляторной батареи
BATT_VOLT_PINBATT_VOLT_MULT
1011,0
Без подкладки0 ~ 3,3 V
На борту Датчик тока
BATT_CURR_PINBATT_AMP_PERVLT
1155,9
RSSI Pad0 ~ 3,3 V
RSSI АЦПАналоговый RSSI
RSSI_ANA_PINRSSI_TYPE
152
I2C
I2C2
Цифровой скорости полета I2C
ARSPD_BUSARSPD_PIN
-1 шт.65
MS4525MS5525DLVR-L10D
ARSPD_TYPE
-1 шт.39
I2C2
Компас
COMPASS_AUTODEC
-1 шт.
I2C1
На борту Баро DPS310
UART
USB
USB
Консоль
SERIAL0
TX1 RX1
USART1
Telem1
SERIAL1
TX2 RX2, SBUS
USART2
RC вход/приемник
SERIAL2
TX3 RX3
USART3
GPS1
SERIAL3
TX4 RX4
UART4
GPS2
SERIAL4
TX5 RX5
UART5
Может использоваться для GPSSERIAL5_PROTOCOL 5
SERIAL5
RX6
USART6
ESC телеметрииSERIAL6_PROTOCOL 16
SERIAL6
Frsky Smartport телеметрииНеинвертированный (взломанный) сигнал порта
Какие-либо запасные Uart_TX
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4
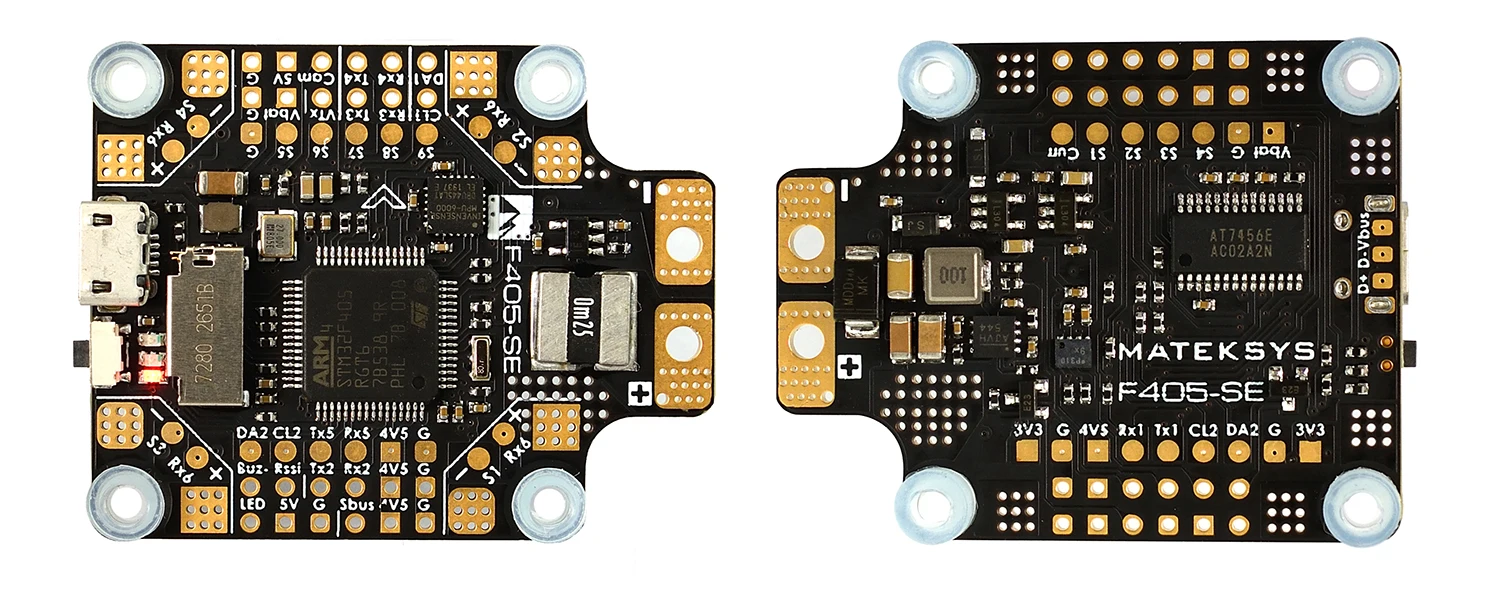
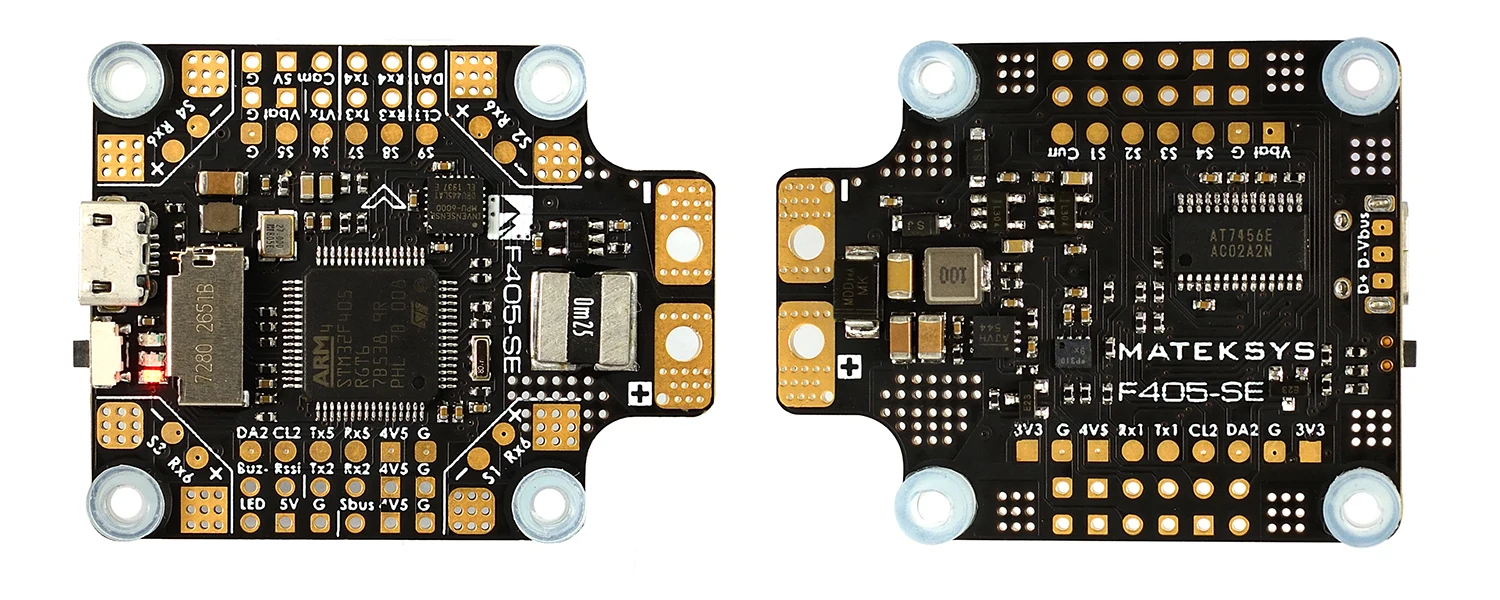
Технические характеристики
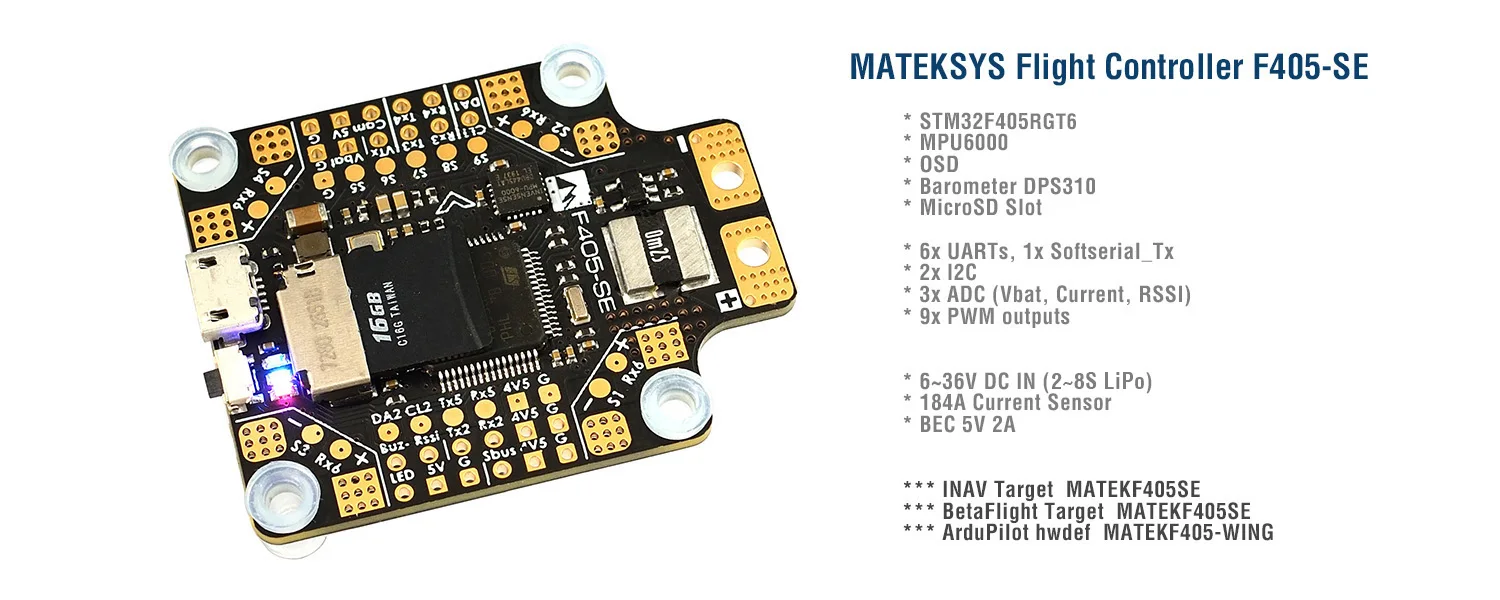
MCU: 168 МГц STM32F405RGT6
IMU: MPU6000 (SPI)
Баро: DPS310 (IEC)
OSD: AT7456E (SPI)
Черный ящик: слот MicroSD (SPI)
VCP и 6x Uarts, поддержка 1x Softserial_Tx
9x PWM выходы (7x Dshot совместим с BF/INAV)
2x I2C
3x АЦП (напряжение, ток, RSSI)
4x RX6 pad (один на угол) для телеметрии BLheli32 ESC
4x индивидуальные ESC мощность/Сигнальные колодки
1х группа G/S1/S2/S3/S4 колодки для 4в1 ESC сигнала/GND
3x светодиоды для состояния FC (синий, зеленый) и индикатор 3,3 В (красный)
Встроенный инвертор на UART2-RX для входного сигнала SBUS
PPM/UART совместно: UART2-RX
Vbat фильтрованная Выходная мощность для VTX
Управление камерой: Да
Протокол Smartaudio и Tramp VTX: Да
DJI FPV OSD протокол: Да
WS2812 Светодиодная лента: Да
Звуковой сигнал: Да
RSSI: Да
PDB Технические характеристики
Вход: 6 ~ 36 В (2 ~ 8S LiPo) с защитой телевизоров
PDB: 4x35A (Max.4x46A)
BEC: 5V 2A cont. (Max.3A)
LDO 220В: Макс. 3,3 мА
Датчик тока 184A (шкала 179 in INAV/BF)
Датчик напряжения аккумулятора: 1K:10K
Встроенное программное обеспечение
INAV: MATEKF405SE
BetaFlight: MATEKF405SE
ArduPilot: MATEKF405-WING
Физический
Крепление: 30,5x30,5 мм, Φ4мм с люверсами Φ3мм
Размеры: 36x46 мм
Вес: 10 г
В том числе
1x F405-SE
6x силиконовые прокладки M4 для M3
1x FR4 КСП плита 36*36*1 мм
1x Rubycon ZLH 35 в/470 мкФ (низкий ESR)