



Последнее обновление: 01.10.2024

В XL330 серии представляет собой компактный и легкий DYNAMIXEL, который является очень полезным в тех случаях, когда здание небольшое приложение или операционной DYNAMIXELs в небольшом пространстве.В отличие от предыдущей начального уровня модели, диапазон напряжения 3,7 V ~ 6V и XL330 поставляется с различными режимами работы, в том числеВ настоящее время на основе регулирования положения и текущий контроль.
1. Различные режимы работы
Скорость контроля, контроль положения, расширенный контроль положения, ШИМ, текущий контроль, в настоящее время на основе регулирования положения
2. Профиль управления для плавного движения планирования
3. Входное напряжение: 3,7 V ~ 6V (Рекомендуемая температура: 5V)
4. Малый размер затрудняетесь в выборе правильного размера? DYNAMIXEL Модель-Размер: 20X34X25 (WⅹHⅹD) [мм] & Вес: 18 г
5. Поддержка RC протокол без каких-либо дополнительных преобразования устройства
6. Энергосбережение с ограниченными возможностями ток
XL330-M288-T
-1 шт.
Робот Cable-X3P 180 мм
-1 шт.
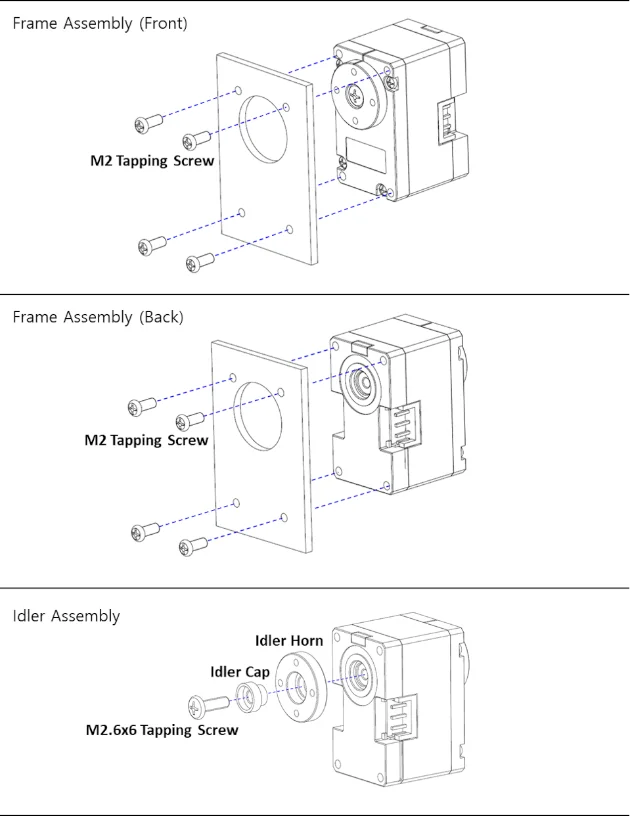
Болт M2x6 водопроводной воды
6
Болт M2x8 водопроводной воды
10
Контроллер: Arduino мкр щит
Интерфейс: USB2Dynamixel, U2D2
ID : 1
Скорость передачи данных: 57600bps
(Пользователь может изменить различные настройки в том числе ID и скорость передачи данных в зависимости от окружающей среды)
 Внимание!
Внимание!
Название модели
XL330-M288-T
MCU
Cortex-M0 + (64 [МГц], 32bit)
Входное напряжение
Мин. [V]
3,7
Рекомендуется [V]
5,0
Макс. [V]
6,0
ТТХ
Напряжение [V]
5,0
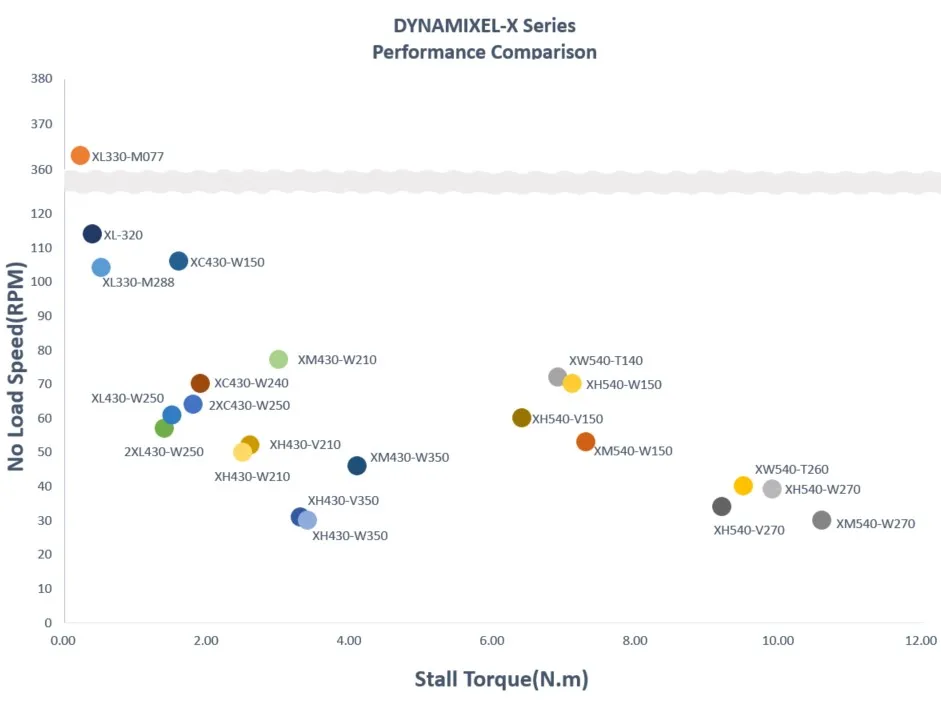
Крутящий момент, крутящий момент (Н · м]
0,52
Стойло ток (A)
1,5
Скорость без нагрузки: [об/мин]
104,0
Ток холостого [A] Экспресс-доставка
0,15
Непрерывной работы
Напряжение [V]
-
Крутящего момента [Н · м]
-
Скорость (об/мин]
-
[A] Экспресс-доставка
-
Разрешение
Разрешение [град/pulse]
0,0879
Шаг [pulse/rev]
4096
Угол [degree]
360
Датчик положения
Бесконтактный Датчик абсолютного отсчета (12Bit, 360 [град]) Производитель: ams(www.ams.com), номер детали: AS5601
Рабочая температура
Мин. [°C]
-5
Макс. [°C]
60
Мотор
Порошковая
Скорость передачи данных
Мин. [ДНС]
9600
Макс. [ДНС]
4500000
Алгоритм управления
PID
Шестеренного типа
Шпоры
Материал шестерни
Инженерный пластик
Материал корпуса
Инженерный пластик
Габариты (WⅹHⅹD) [мм]
20X34X26
Габариты (WⅹHⅹD) [дюйм]
0,78X1,33X1,02
Вес [г]
18,00
Вес [oz]
0,63
Передаточное число
288,4: 1
Командный сигнал
Цифровой пакет
Тип протокола
Полудуплекс асинхронный двигатель с последовательным (8bit, 1 стоп, нетчетности)
Ссылку (физические)
TTL уровня мульти падение автобуса
ID
0 ~ 252
Обратная связь
Положение, скорость, нагрузку, в реальном времени клеща, траектории, температура, мощность на входе и т. д
Тип протокола
Протокол 2,0DYNAMIXEL протокол 2,0Экспериментальная S.BUSЭкспериментальная заблокироватьRC-PWM
Режим работы/угол
Текущий режим управления: бесконечные поворотаСкорость режим управления: бесконечные поворотаПозиция Режим управления: 360 [°]Том случае, если на режим управления: ± 256 [rev]В настоящее время на основе позиции Режим управления: ± 256 [rev]PWM режим управления: бесконечные поворота
Выход [W]
-
Ток холостого хода [мА]
15