




Последнее обновление: 07.04.2022

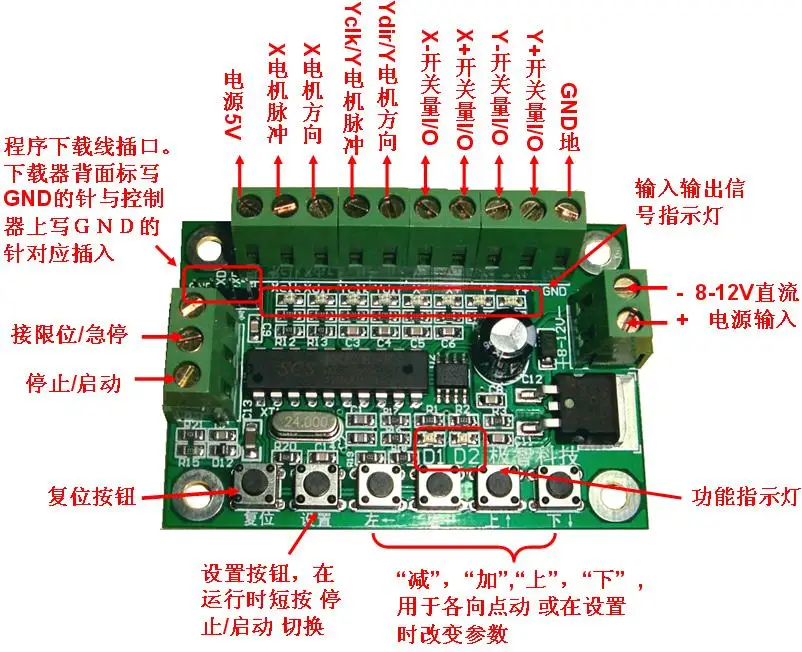
Программируемый линейный контроллер движения интерполяцииV1.02, Содержит различные инструкции, полная инструкция, мощная функция; Он может управлять двумя шаговыми драйверами или серводвигателями одновременно, это просто и удобно, чтобы реализовать механизм связи двух двигателей. ВКонтроллер можетИспользуется во всех видах обрабатывающего оборудования, роликовая подача, упаковочное оборудование, машина для производства мешков, сверлильная машина, режущий станок, автомат для резки этикеток и другое автоматическое контрольное оборудование.
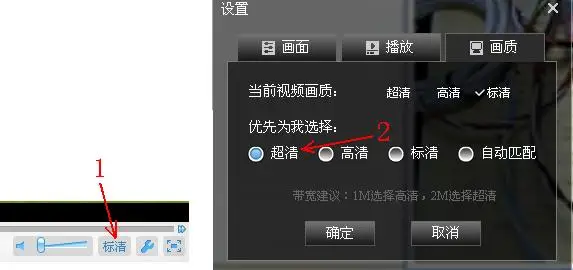
Если вы не играете в видео высокой четкости, вы можете нажать на нижний правый угол окна плеера, как показано на рисунке ниже, вы можете увидеть текст в высокой четкости.
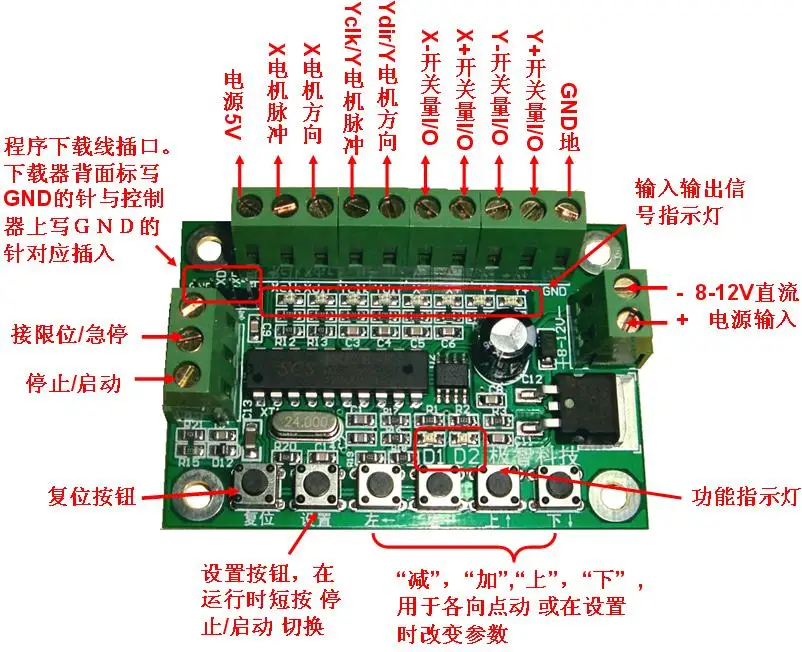
Этот контроллер не включает в себя линию загрузки программы, нет линии загрузки, друзья должны снимать, в противном случае, программа не может быть загружена, несколько
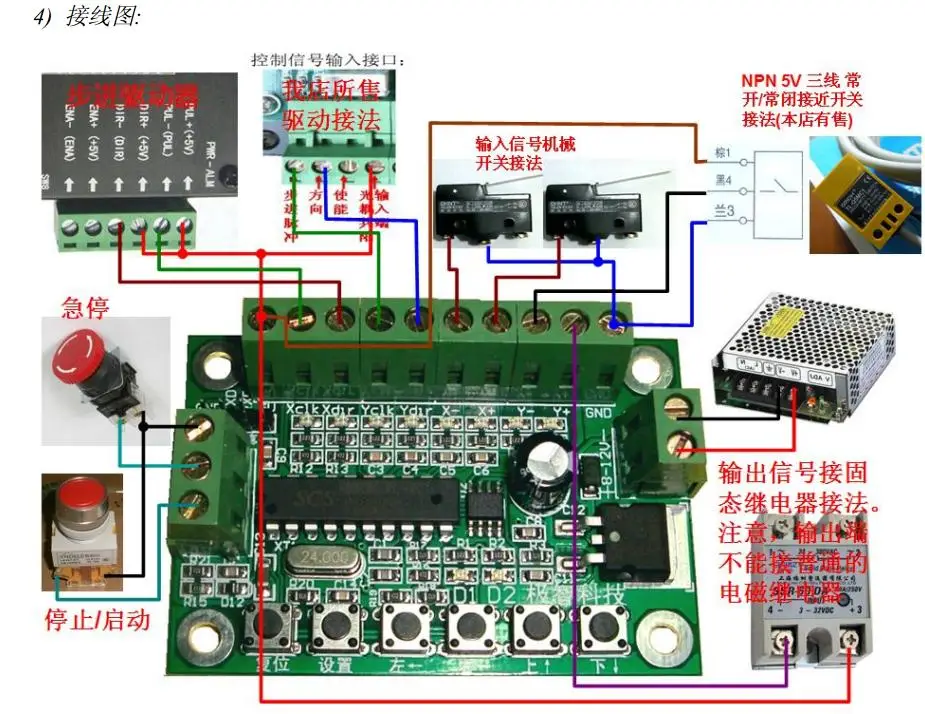
1)Основные характеристики:
Двухосевая линейная интерполяция. 2.Вход переключателя цепи/Выход. Выходная частота:70 Гц-31K Гц (Подходит для различных дисков). Количество программ:1-222Полоса. Инструкция по программированию: обычная20 многоИнструкции. Характеристики инструкции: гибкое комбинированное программирование по мере необходимости (оно может реализовывать все виды сложных операций: контроль позиционирования и контроль позиционирования) Режим работы: пользовательский режим самостоятельного программирования и режим инициализации. Совокупный диапазон движения:-2000000000-+2000000000Импульсы Программирование с помощью компьютера, удобный и интуитивно понятный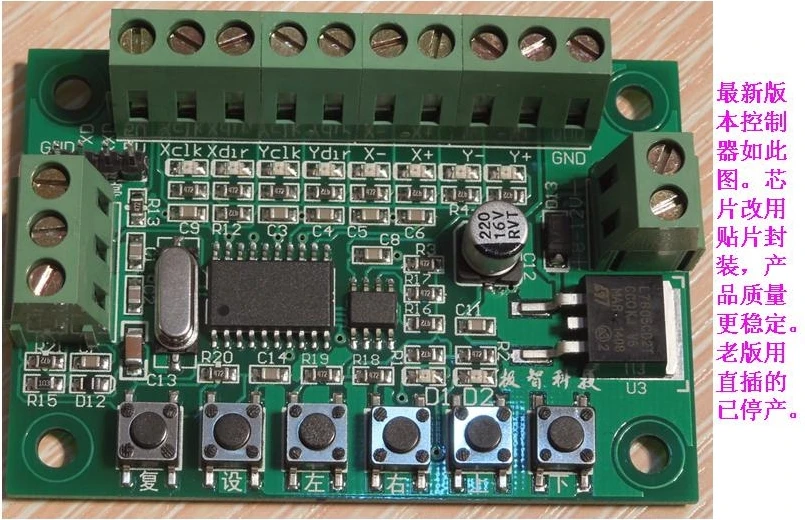
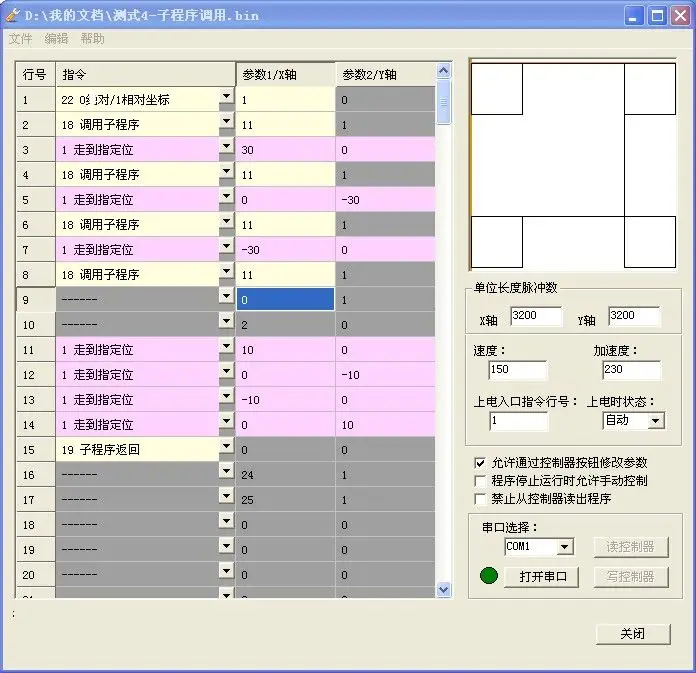
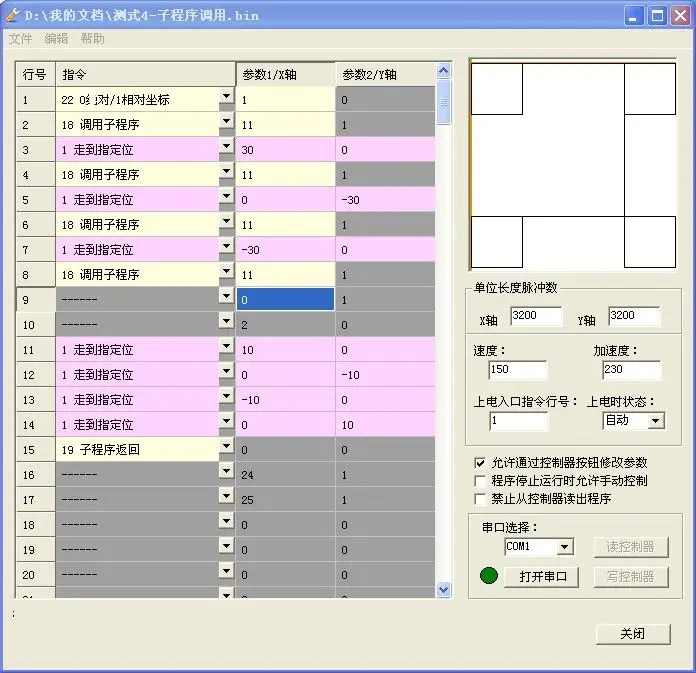
Инструкция по программированию:
1.Перейти к позиционированию пальцев: XОсьYОсь переходит к указанным координатам(Параметр1.Изготовитель:XОсь,Параметр2.Изготовитель:YОсь)В режиме абсолютной координаты(Режим координат по умолчанию,Доступно через22Изменение заказа №),Значение прогулки является параметром1.И2.Указанное значение минус текущая координата(Координаты после последнего выполнения команды move,Текущая координата включения и включения питания0)В относительном режиме координат,Значение прогулки является параметром1.И2.Указанное значение. Значение координат1.Количество импульсов на выходе\"Количество импульсов на единицу длины\"Назначение.
2.Пауза при запуске программы: Программа прекращает работуПараметр1.Указанное время, единица измеренияМиллисекунда.
3.Вернуться к нулю:Параметр1.Определяет ось для возврата к нулевой координате, параметру1.Изготовитель:: 0=XИYОси,1.=XОси,2.=YОсь.
4.Остановить Запуск программы:Остановите программу, нажмите на контроллер «start»/Кнопка «остановить или установить», чтобы продолжить работу.
5Перейти к линии: перейти к параметру1.Указанная программная линия.
6Rediscover фотография: по параметрам1.Укажите ось и направлениеПерейти кПараметр2.Назначенный «триггер»Переместите назад, до тех пор, пока сброс «пускового выключателя». Параметр1.Изготовитель:1.=XОсь движется вперед к исходу,2.=XОсь движется отрицательно к исходу,3.=YОсь отрицательная положительная к исходу4.=YОсь от отрицательного до исходного. Параметр2.Изготовитель:1.=X +Триггерный переключатель с подключенным терминалом,2.=X-,3.=Y +,4.=Y-.
7Движение пускового двигателя: запуск двигателя для перемещения в положение, указанное параметром, параметром и «1.Перейти к позиционированию пальцев» инструкции одинаковые. Разница между этой командой и командой позиционирования go to finger заключается в том, что команда запускает двигатель, немедленно перейти к следующей инструкции и продолжить, не нравится1.Вот какая команда номер один, подождите, пока двигатель не будет на месте, прежде чем выполнить следующую команду. Чтобы выключить двигатель, вы можете использовать"8Выключите двигатель или нажмите на панель управления «Пуск»/Остановить его» и «настроить» ключ
8Переход на триггер: параметр1.Задает ось для перемещения и переключатель запуска. Параметр1.Изготовитель:1.=XОсь вперед кX-Переключатель срабатывает,2.=XОсь движется отрицательноX +Переключатель срабатывает, 3=YОсь вперед кY-Переключатель срабатывает,4.=YОсь движется отрицательноY +Переключатель срабатывает,Параметр2.Это режим триггера:0= Указанный конец иGNDКороткое замыкание является эффективным триггером,1.= Указанный конец иGNDОтключение является допустимым триггером.
9Выключите двигатель: когда инструкция выполнена, если двигатель вращается, немедленно остановите его, без вращения, без эффекта.
10Очистка координат: четкие параметры1.Указанное значение внутреннего регистра координат становится0, Параметр1.Изготовитель:0=XИYОсь1.=XОси,2.=YОсь.
12Выход указанной ширины импульса:Параметр1.Указанный конечный выходПараметр2.Указывает на низкий уровень времени, после этого выход вернется на высокий уровень, параметр1.Изготовитель:1.=X +Терминал,2.=X-,3.=Y +,4.=Y- 5 = Ydir 6 = Yclk。 Параметр2.Показывает время удержания низкого уровня, блок Ms.
13Низкий уровень выхода: параметр1.Указанный вывод терминала низкий уровеньПараметр1.Изготовитель:1.=X +Терминал,2.=X-,3.=Y +,4.=Y- 5 = Ydir 6 = Yclk.
14Высокий уровень выхода: параметр1.Указанный выходной терминал высокого уровняПараметр1.Изготовитель:1.=X +Терминал,2.=X-,3.=Y +,4.=Y- 5 = Ydir 6 = Yclk.
15Ожидание падения края: ожидание параметров1.Указанный конец имеет падающую кромку(Момент от высокого уровня до низкого уровня),Параметр1.Изготовитель:1.=X +Терминал,2.=X-,3.=Y +,4.=Y-.
16Ожидание низкого уровня: Ожидание параметров1.Указанный терминал низкий,Параметр1.Изготовитель:1.=X +Терминал,2.=X-,3.=Y +,4.=Y-.
17Ожидание высокого уровня: ожидание параметров1.Указанный терминал высокий,Параметр1.Изготовитель:1.=X +Терминал,2.=X-,3.=Y +,4.=Y-.
18Вызов subroutine: параметры выполнения вызова1.Субрутин указанной линии,Последний субрутин должен быть «19Subroutine return».
19Subroutine return:Return to «Call subroutine» следующая инструкция по эксплуатации.
20Набор переменныхAЗначение: Установите значение внутреннего Регистра в качестве параметра1.Значение, его можно использовать для подсчета количества циклов программы.
21ПеременнаяAБыть равным0Прыжок: судьюAЭто равно0,Быть равным0Перейти к параметрам1.Указанная строка. Не равна0Время, удержаниеAУменьшить1.После, перейдите к следующей строке.
22 0Абсолютно/1Относительные координаты: Настройка системы координатПараметр1.Изготовитель:0= Абсолютные координаты,1.= Относительные координаты.
23Выполните скачок на основе входного состояния: параметра1.Когда заданный вход срабатывает, перейти к параметру2.Указанная строка, если не срабатывает, перейдите к следующей строке. Параметр1.Изготовитель:1.=X +Терминал,2.=X-,3.=Y +,4.=Y-,5 =Двигатель работает, при повороте он эквивалентен включению.
30Скорость/Ускорение: параметр1.Это значение скорости, параметр2.Это значение ускорения. Параметр1.Быть равным0Время,Не изменяйте настройки скорости, параметры2.Быть равным0Время,Не изменяйте настройки ускорения.