









Последнее обновление: 04.10.2024


Руководство пользователя:
Https://drive.google.com/drive/folders/1qOJOkts4MuCLNZzp8GTTFI2qtsHrmLaM?usp=sharing
Режим работы EtherCAT:
Режим положения синхронизации CSP
Режим позиционирования трека PP
Режим скорости PV трека
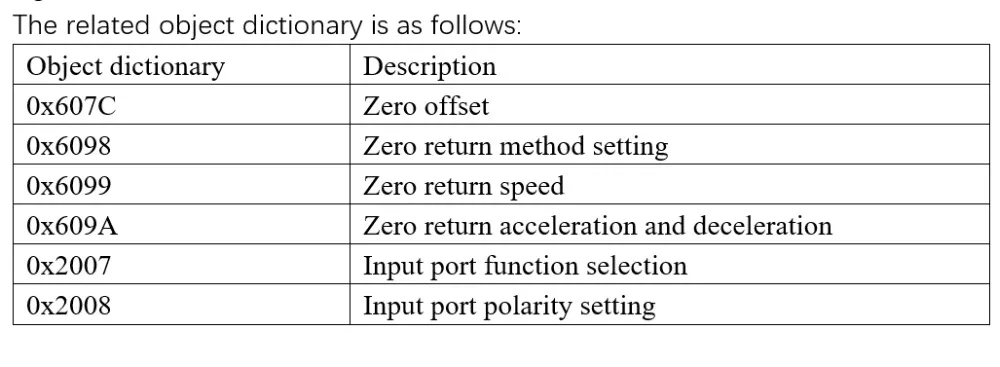
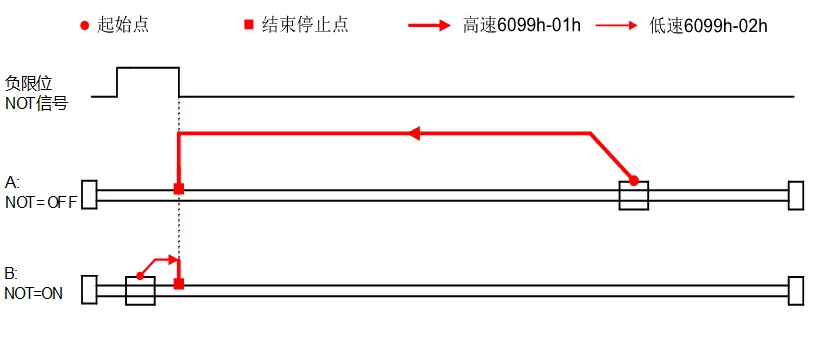
Возвращение ДОМОЙ к нулю
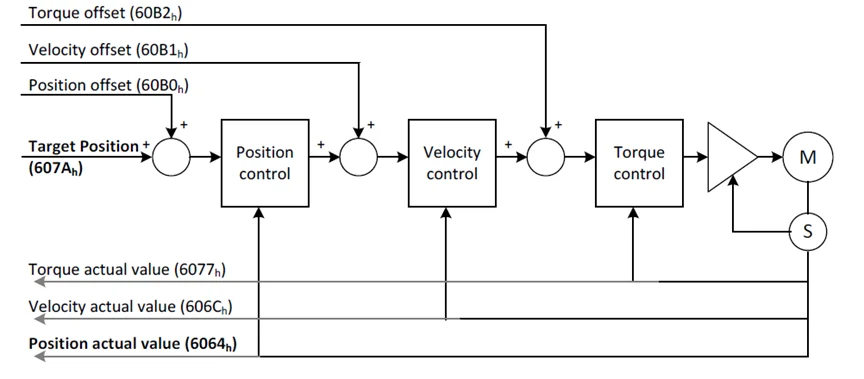
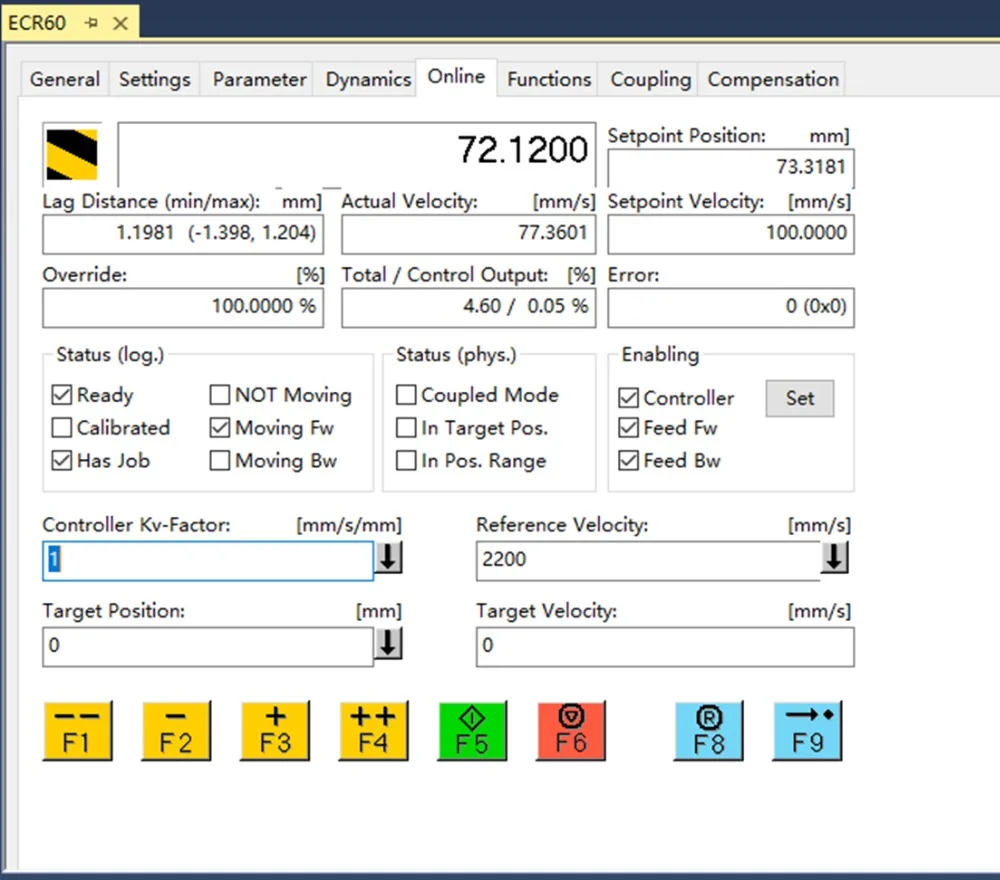
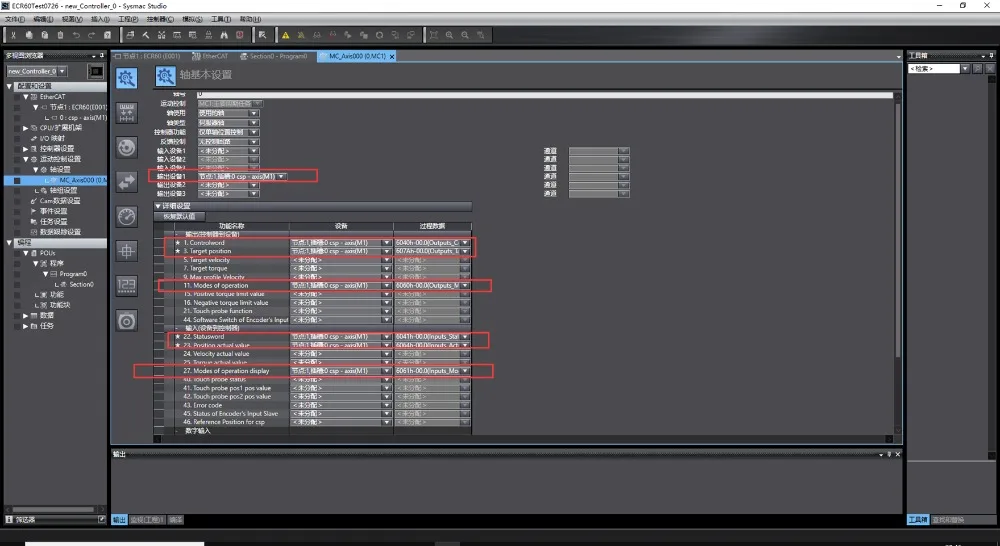
Режим положения синхронизации CSP
Главный контроллер генерирует траекторию положения и отправляет целевую позицию (0x607A) на привод во время каждого цикла обновления PDO. Привод возвращает фактическое положение двигателя и дополнительные фактические скорость и крутящий момент двигателя.
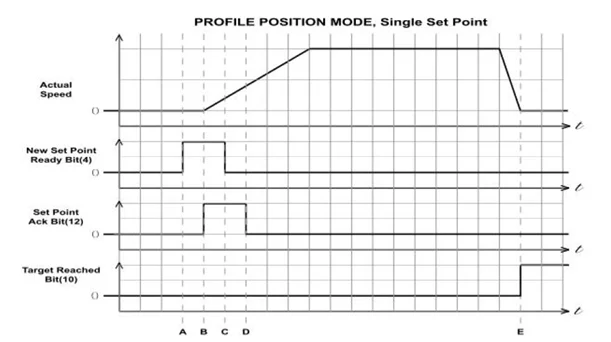
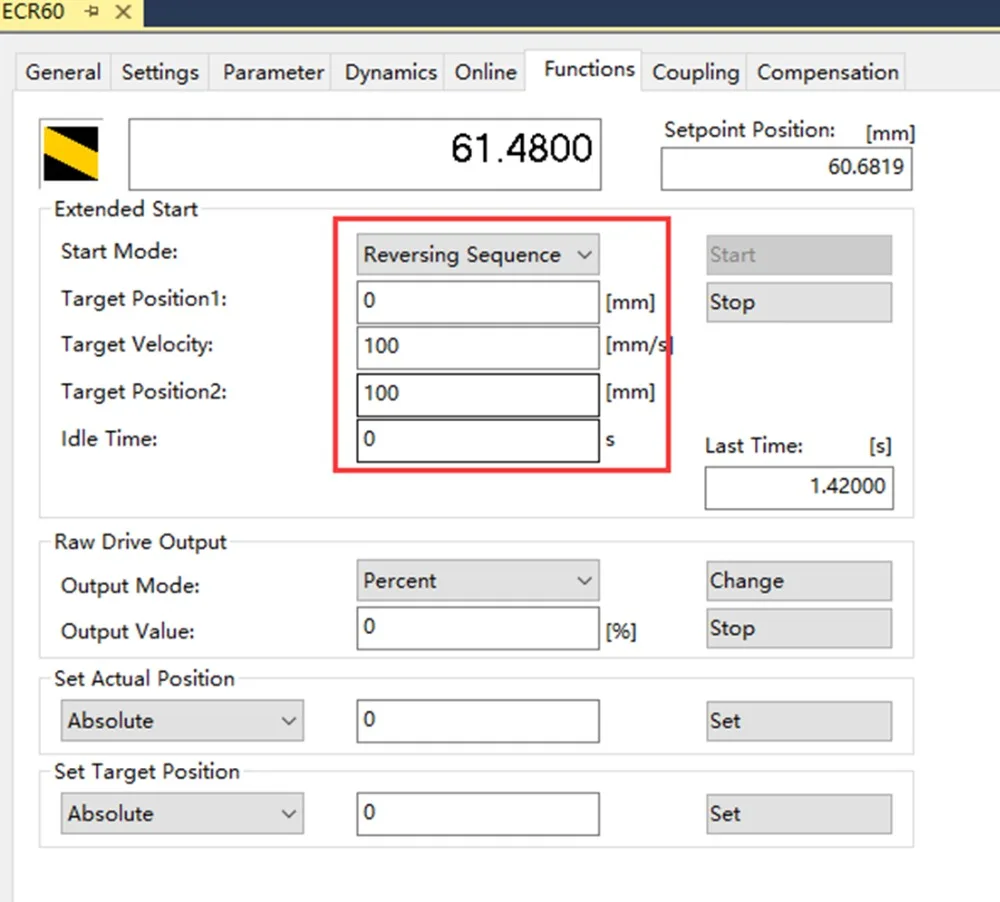
Режим позиционирования трека PP
Режим работы «точка-точка», в котором используются заданные величины, состоящие из скорости, ускорения, замедления и целевого положения. После того, как все эти параметры установлены, привод кеширует эти команды и начинает выполнение заданных значений.
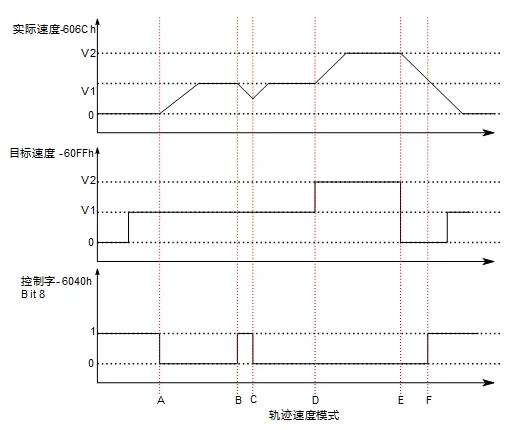
Режим скорости PV трека
Относительно простой режим работы. Как только скорость, ускорение и замедление установлены, привод подает команду двигателю разогнаться до рабочей скорости в соответствии с параметром ускорения или остановить движение в соответствии с параметром замедления.
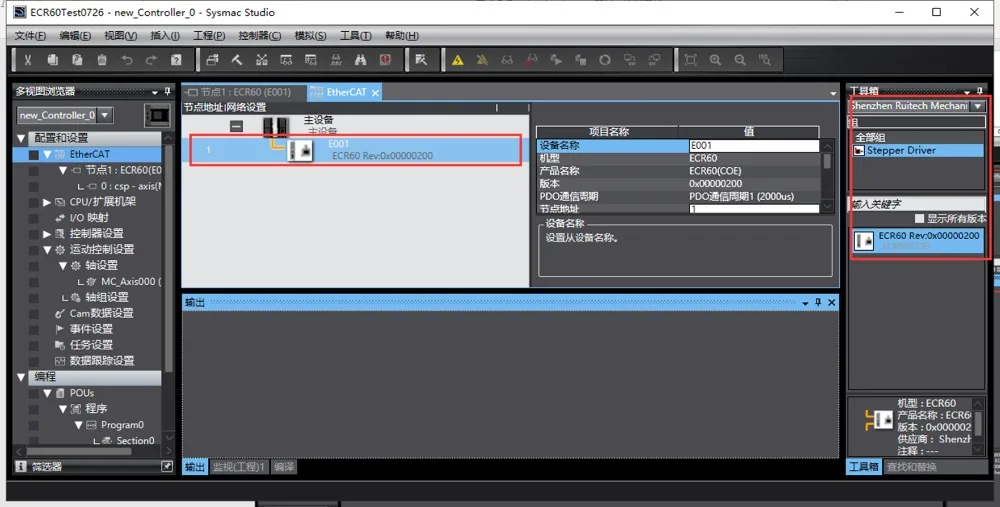

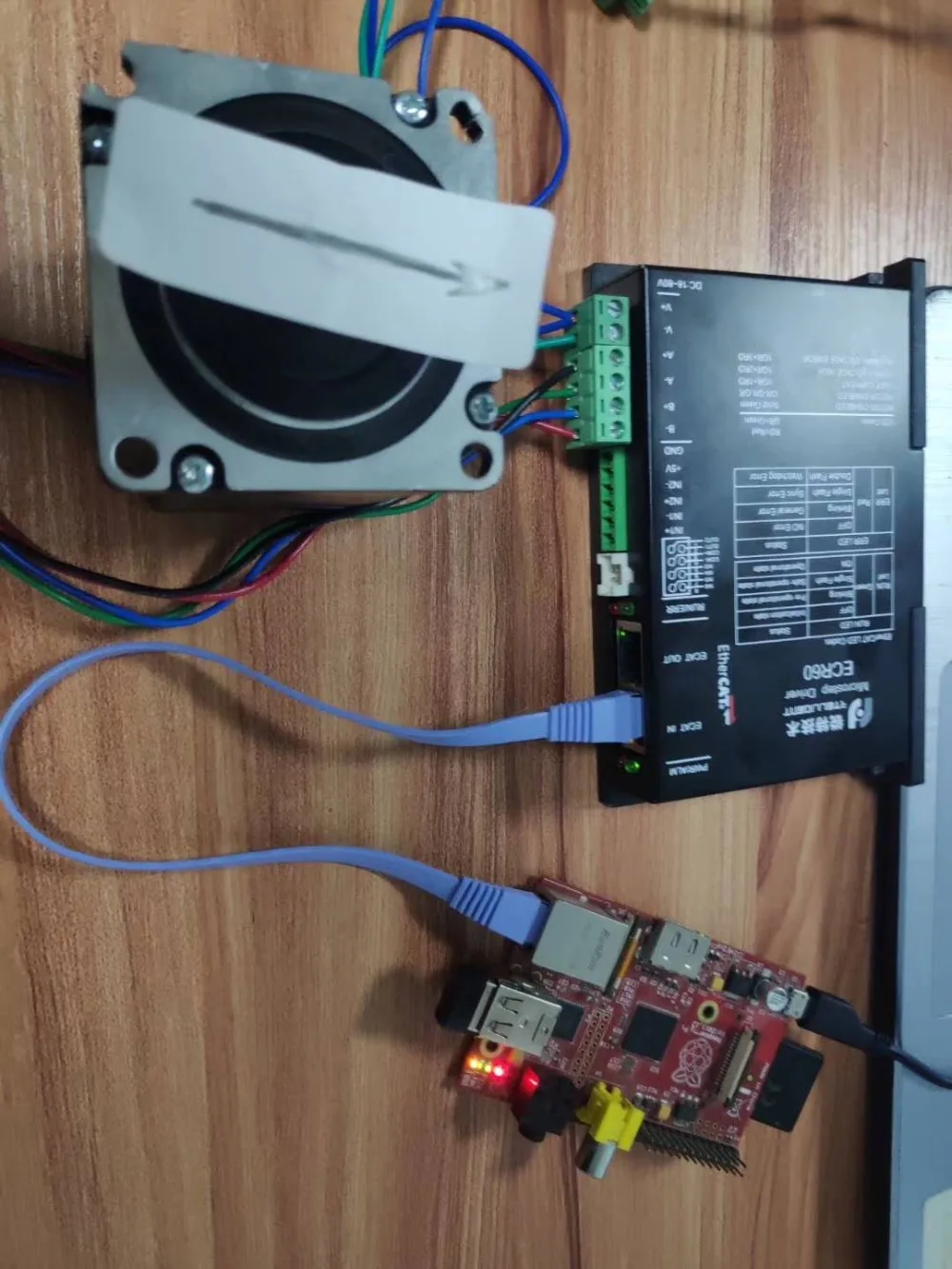
Raspberry PI соединяется с Rtelligent ECR60 EtherCAT