



Последнее обновление: 26.09.2024
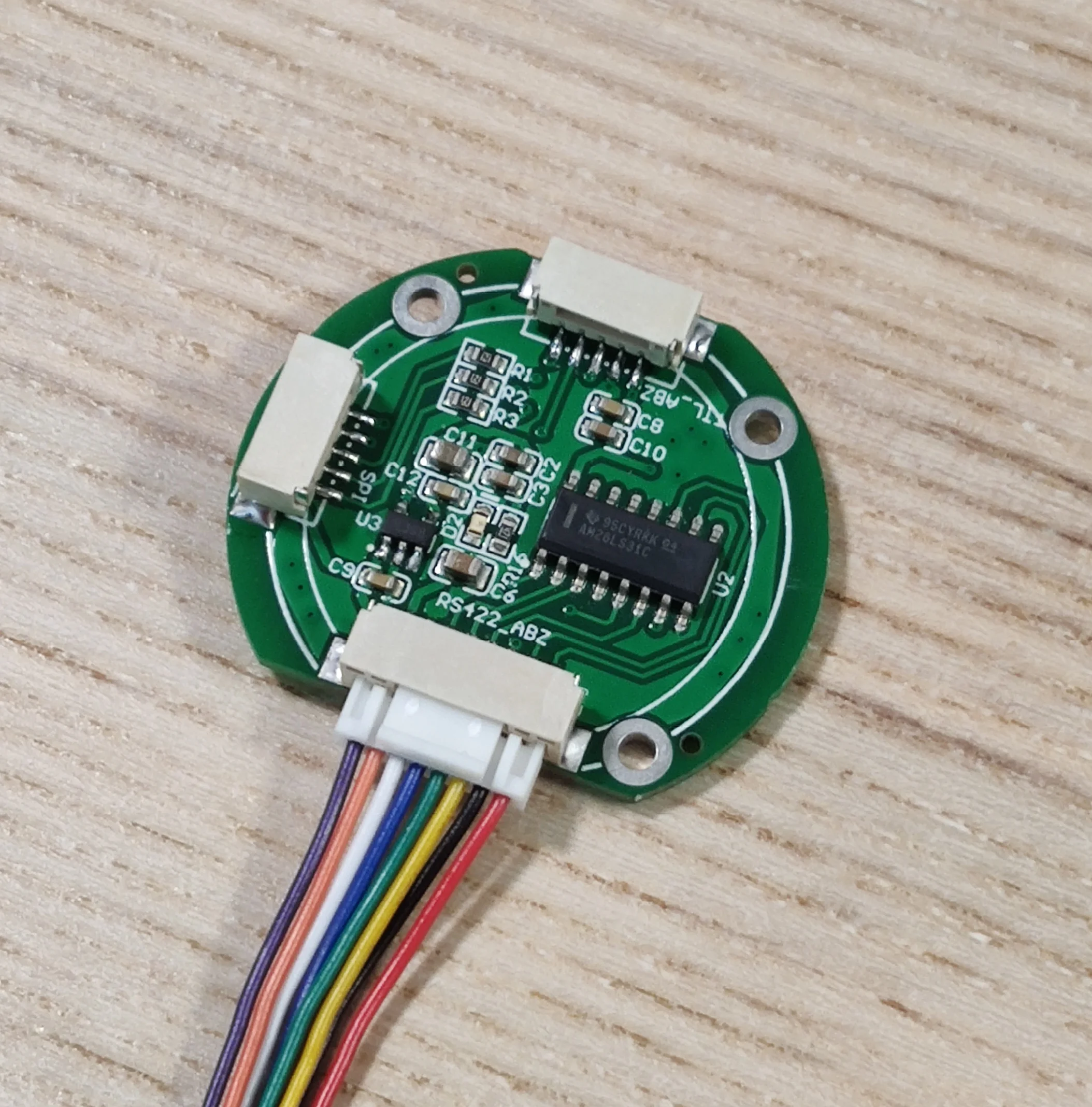
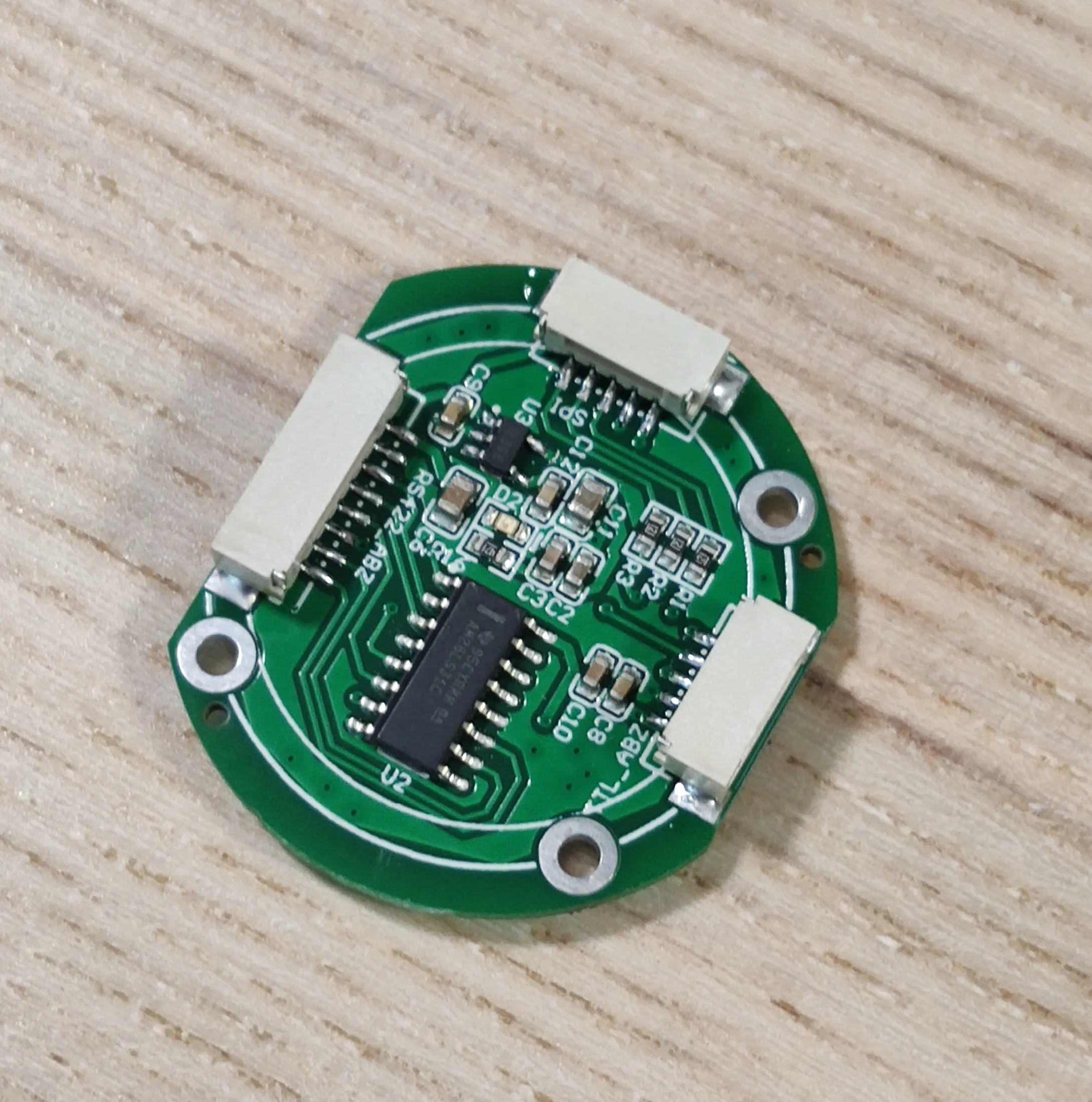
Описание материнской платы энкодера:
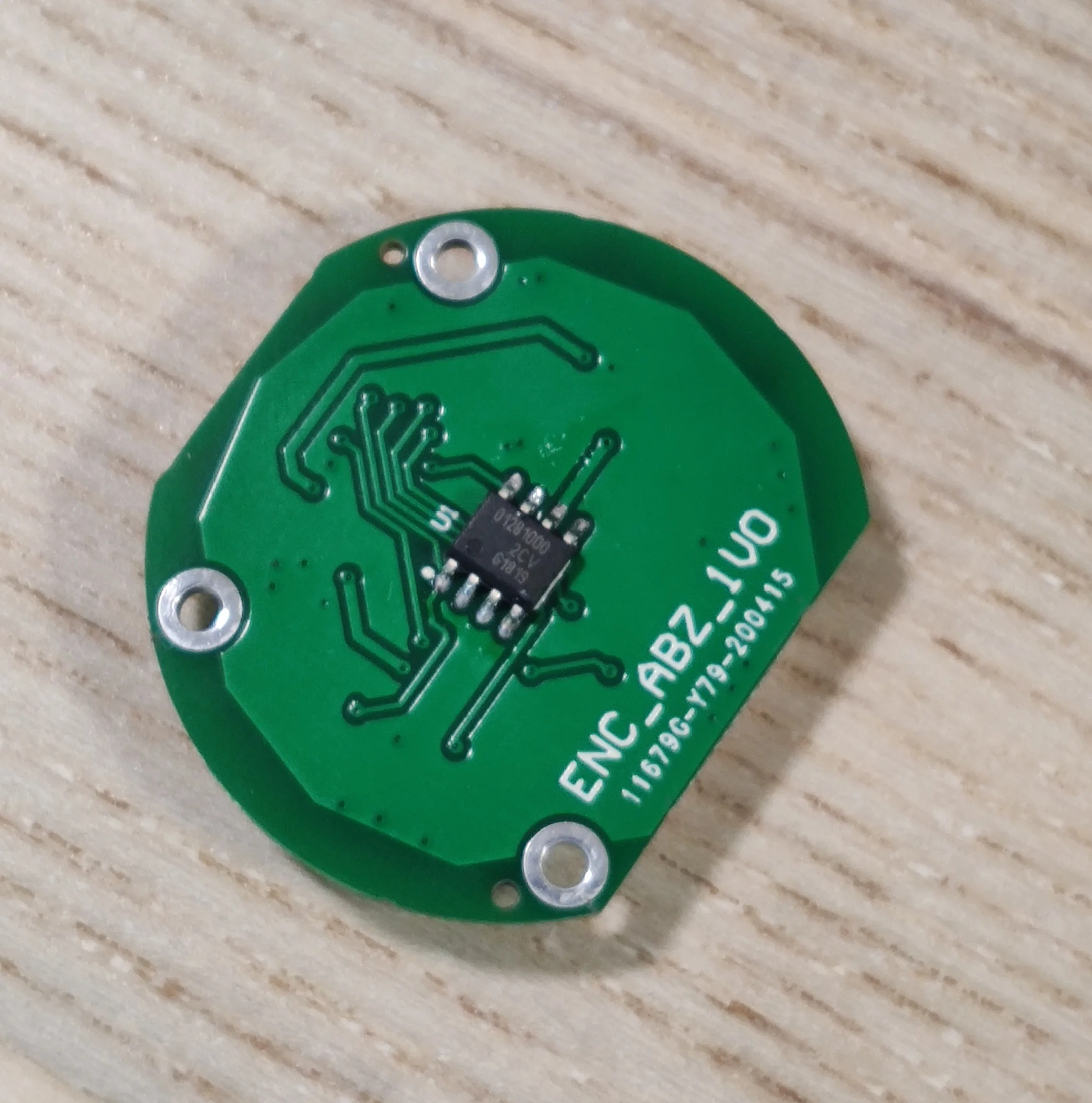
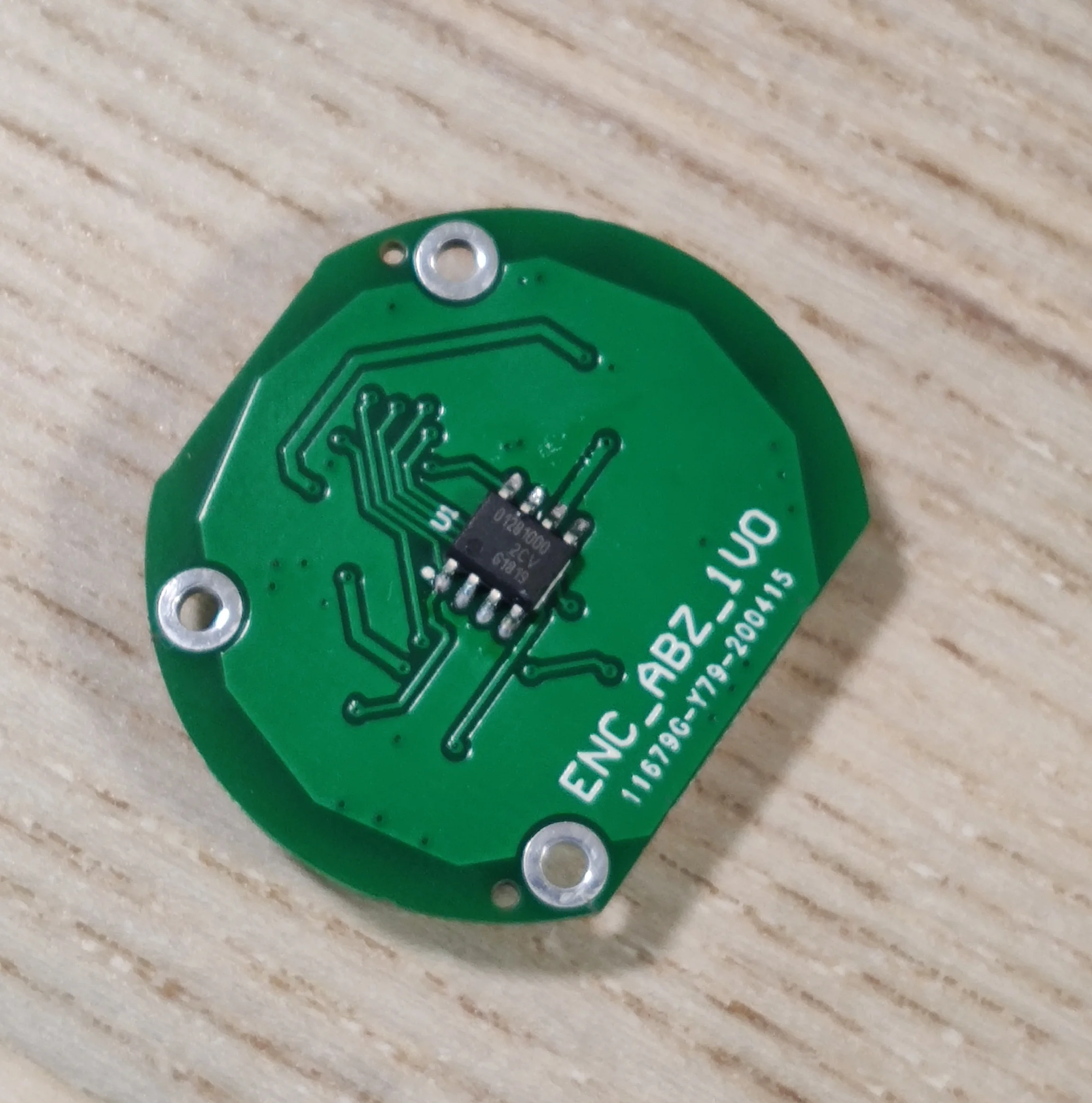
Разрешение автомобильного магнита чип кодировщика TLE5012B составляет до 16384/об. TLE5012B-это датчик угла на 360 °, который может определять направление магнитного поля. Это достигается путем измерения элементов компонента синуса и косинуса с помощью монолитного интегрированного гигантского магнитосопротивления (iGMR). Эти оригинальные сигналы (синус и косинус) обрабатываются в цифровом виде внутри для расчета углового направления магнитного поля (магнит) и подключаются к основной плате (VESC или ODrive) в качестве интерфейса ABZ.
Описание функции TLE5012B
По принципу гигантского магнитосопротивления (GMR)
Интегрированное измерение магнитного поля для измерения угла
Измерение угла 360 ° с помощью тахометра и измерения угловой скорости
Два независимых высокоточных однобитных SD-ADCs
Используйте 15-битное представление значения абсолютного угла на выходе (разрешение 0,01 °)
Используйте 16-битное обозначение синуса/косинуса на интерфейсе
Максимальная активация автоматической калибровки, приводящая к угловой погрешности в 1,0 ° в пределах срока службы и диапазона температур
Двунаправленный интерфейс SSC до 8 Мбит/с
Поддерживает уровень целостности (SIL) с диагностическими функциями и информацией о состоянии
Интерфейс: SSC, PWM, инкрементный интерфейс (IIF), режим переключения Холла (HSM), короткий ШИМ-код (SPC, на основе отправленного протокола, определенного в SAE J2716)
Выходной контакт может быть настроен (запрограммирован или предварительно настроен) как нажимной или открытый слив
Интерфейс SSC или SPC может использоваться для реализации работы в режиме Шины нескольких датчиков на одной линии
0,25 мкм CMOS технология
Прошел сертификацию автомобиля: от-40 °C до 150 °C (температура перехода)
ESD> 4 кВ (HBM)
Соответствует RoHS (Бессвинцовая упаковка)
Без галогенов
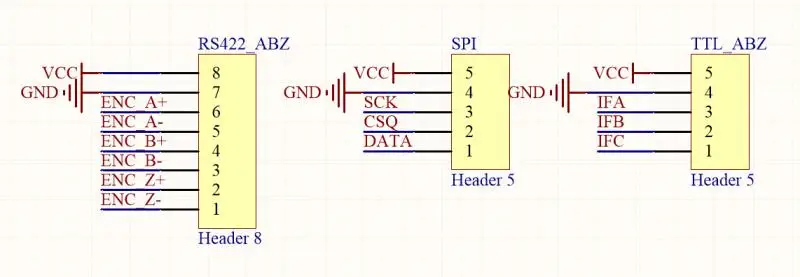
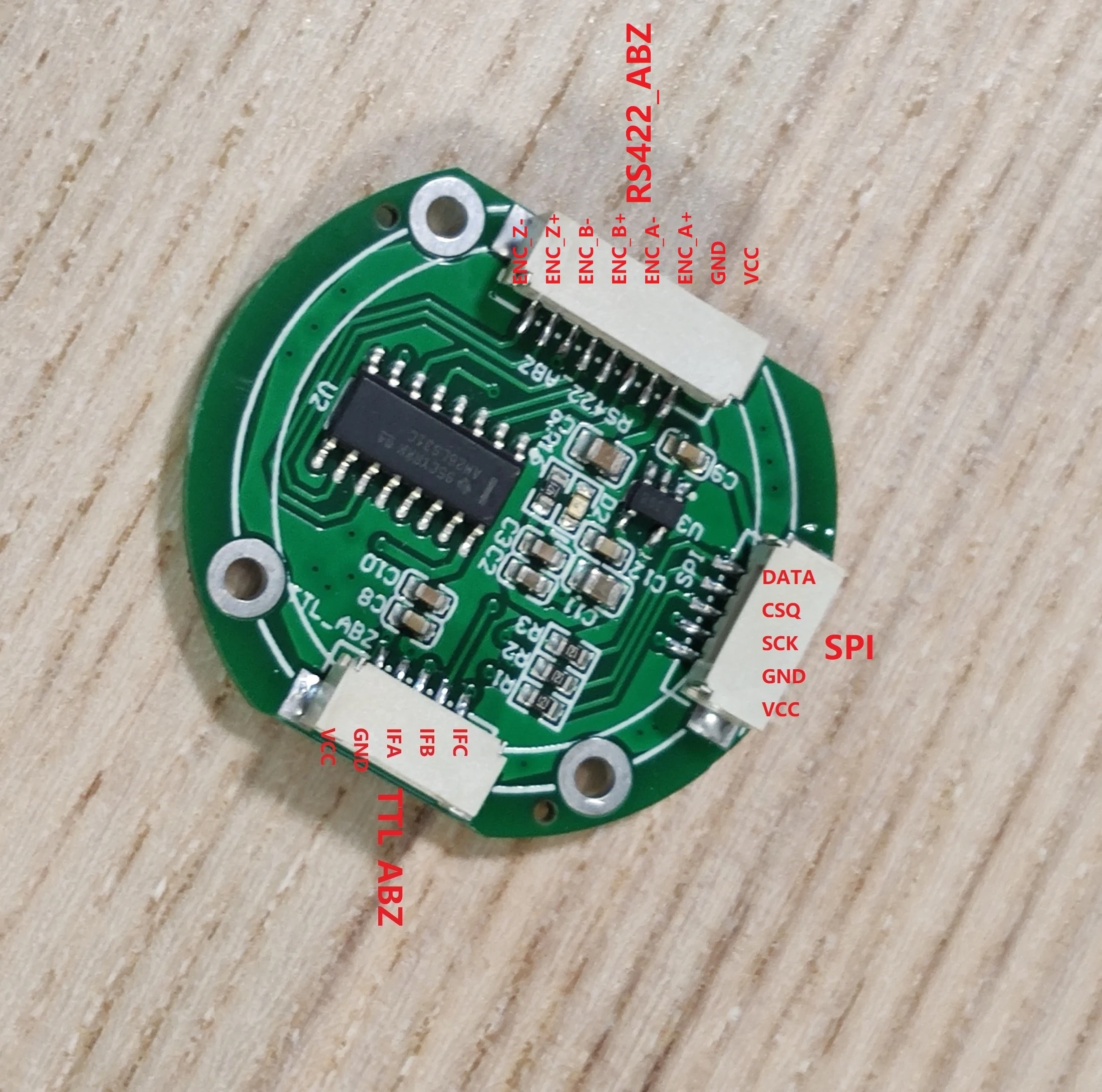
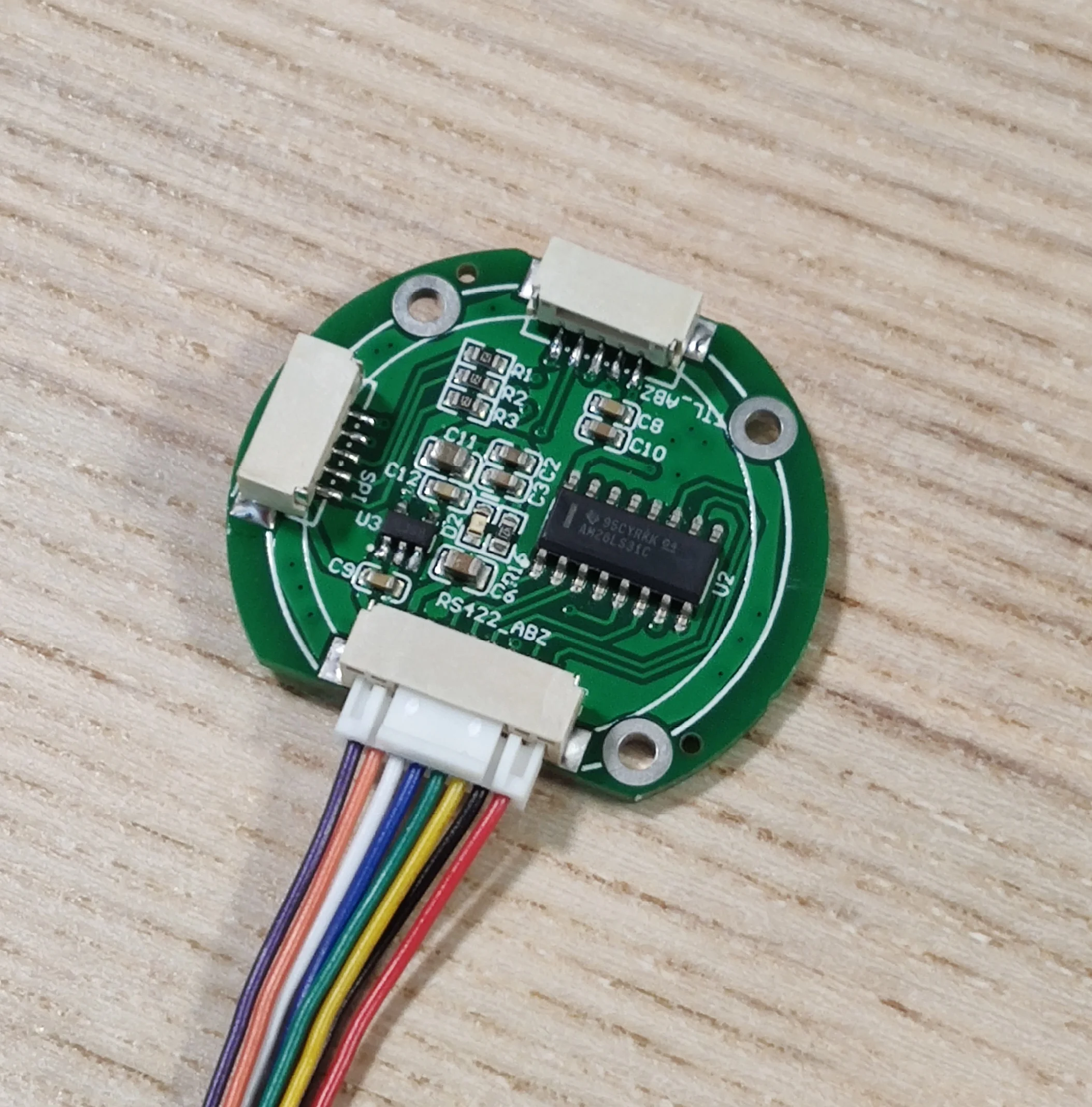
1. Источник питания: 4,5 В ~ 5,5 В 2. Разрешение: 16384 3. Поддержка выхода сигнала TTL ABZ, дифференциального выхода RS422 ABZ, поддержка связи SPI
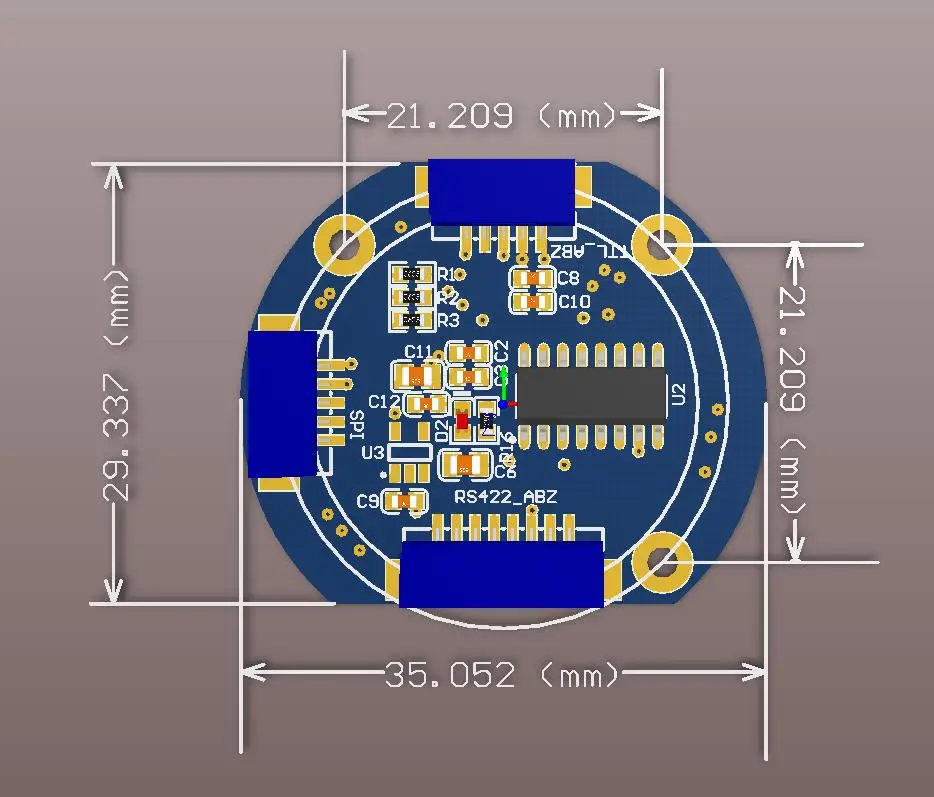
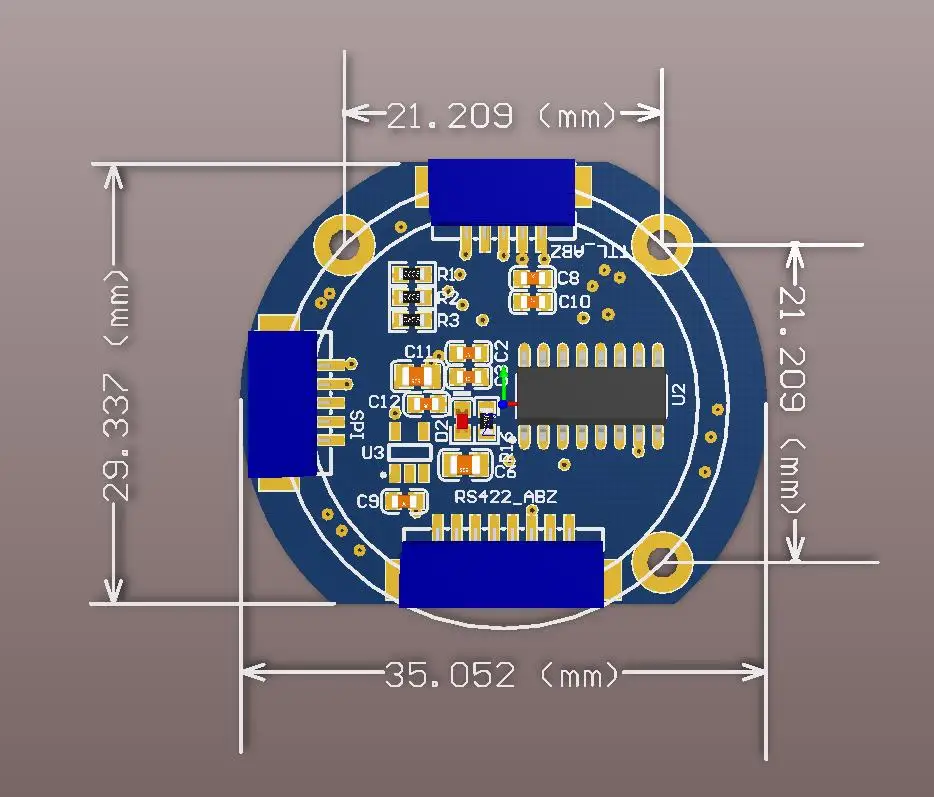
Рекомендации по установке: чип датчика должен быть коаксиальным с магнитом (погрешность должна быть в пределах 0,5 мм), а расстояние между чипом датчика и магнитом должно быть 1 мм ~ 3 мм.
Комплектация: плата энкодера, круглый магнит 6*2,5, обжимной сигнальный провод.
\