

Последнее обновление: 12.10.2024
Обзор
DM-19-это радиолокационный модуль скорости/чувствительности 24 ГГц, который может выводить значение скорости и направление движения (близко/далеко) через последовательный порт.
DM-19 добавлен алгоритм защиты от встряхивания для улучшения защиты от дождя и вибрации.
Характеристика
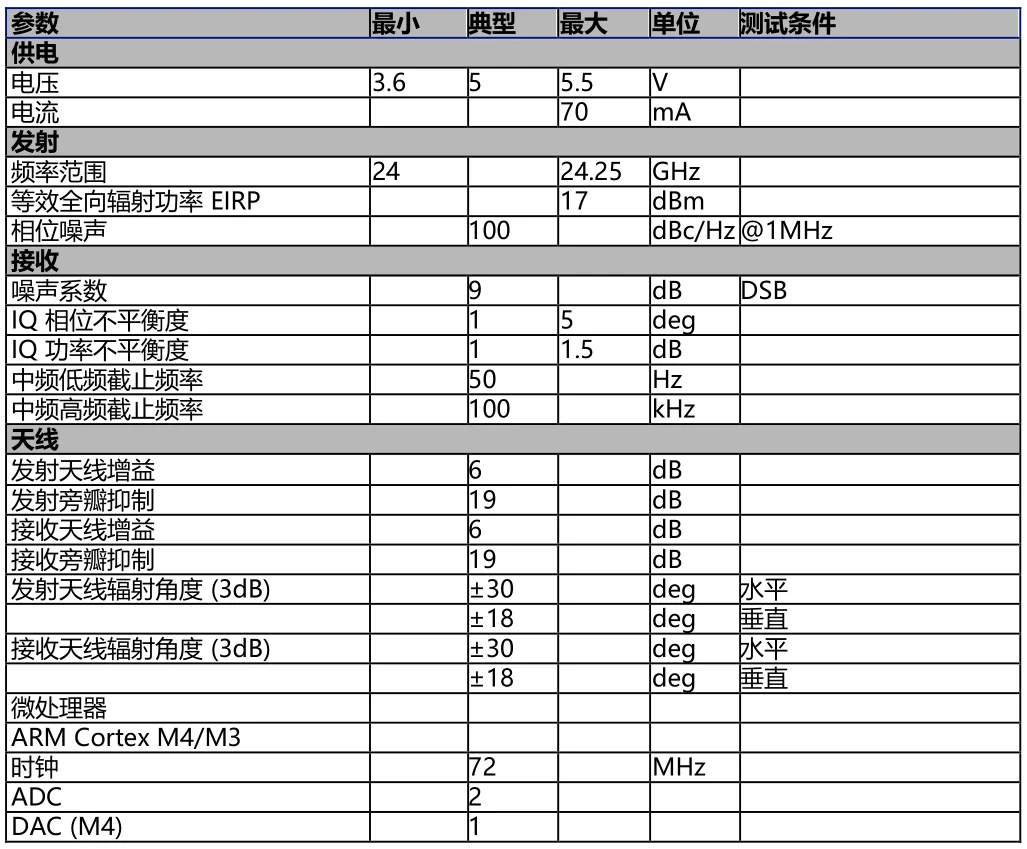
Диапазон рабочих частот: 24 ~ 24,25 ГГц
Расстояние обнаружения: люди 0-15 м, транспортные средства 0-30 м
Диапазон скорости: 1 ~ 300 км/ч
Погрешность точности: ± 1 км/ч
Максимальная эквивалентная изотропная Излучаемая мощность (EIRP): 17 дБм
Фазовый шум: 100 ДБН/Гц @ 1 МГц
Коэффициент приема шума: двойная боковая полоса 9 дБ
Прием фазового дисбаланса IQ: <5 градусов
Получение разбаланса мощности IQ: <1,5 дБ
Максимальное усиление напряжения: 45 дБ
Одиночный источник питания 5 В, максимальный ток: 70 мА
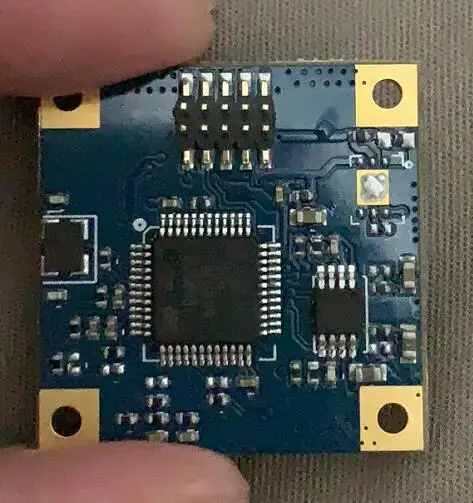
Микропроцессор с ARM Cortex M4 / M3 series
Размер: 25*25 мм
Применение
Применение IOT (панель управления дверью распознавания лиц, умная бытовая техника и т. д.)
Мониторинг слепых зон BSD для автомобилей, мотоциклов и электромобилей
Применение при транспортировке (Предупреждение столкновений, отображение скорости и т. Д.)
Промышленное применение (уличсветильник, энергосберегающая индукция, измерение скорости машины и т. д.)
Приложение безопасности (активное обнаружение, сигнализация вторжения, триггер видео)

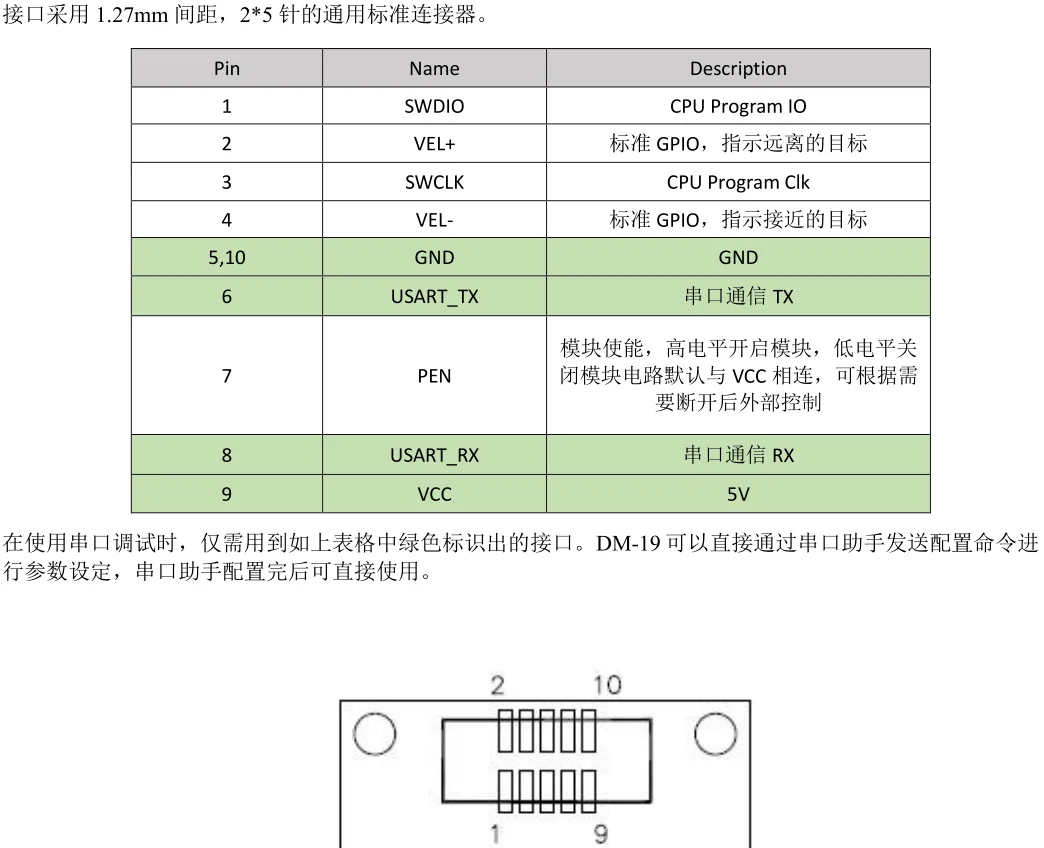
Электрические характеристики
Информация об интерфейсе
Протокол связи
Связь поддерживает USART текст соглашения.
Параметры USART следующие:
Скорость передачи: 115200
Ширина слов: 8 бит
Остановка: 1
Проверка четности: 0
DM-19Feedback Описание данных:
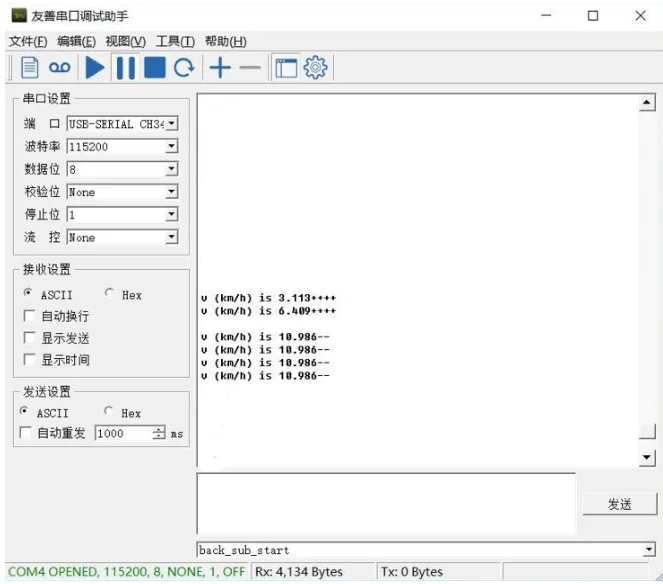
V (км/ч)-xx ++++: цель, которая отходит, обнаруживается на скорости xx км/ч. В то же время, Контакт № 2 VEL + преобразуется в высокий уровень и поддерживается на высоком уровне в течение определенного периода времени, пока цель не покинет эффективный диапазон контроля радара.
V (км/ч)-xx --: обнаружение приближающейся цели, скорость составляет xx км/ч. В то же время, No. 4 VEL- pin меняется на высокий уровень и остается на высоком уровне в течение периода времени, пока цель не покинет эффективный диапазон контроля радара.
Команды последовательной конфигурации
Таргет _ th = xx
Xx-целое число больше 0, используемое для настройки чувствительности обнаружения, чем больше значение, тем ниже чувствительность
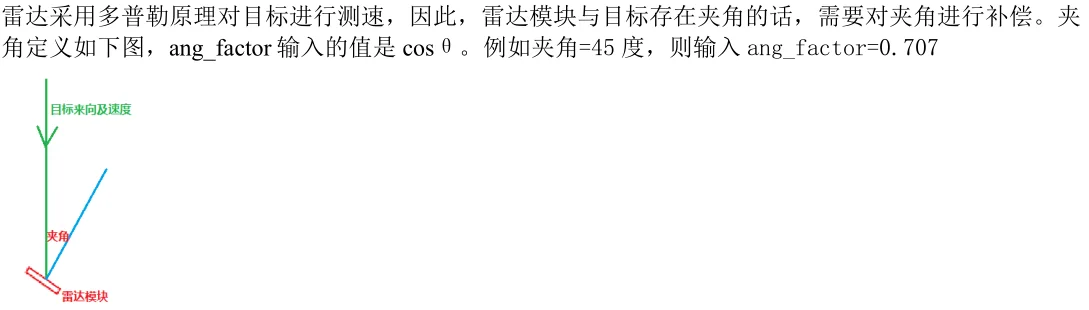
Ang_factor = xx
Xx-десятичная величина больше 0 и меньше 1, используется для коррекции влияния угла установки радара на тестовую скорость
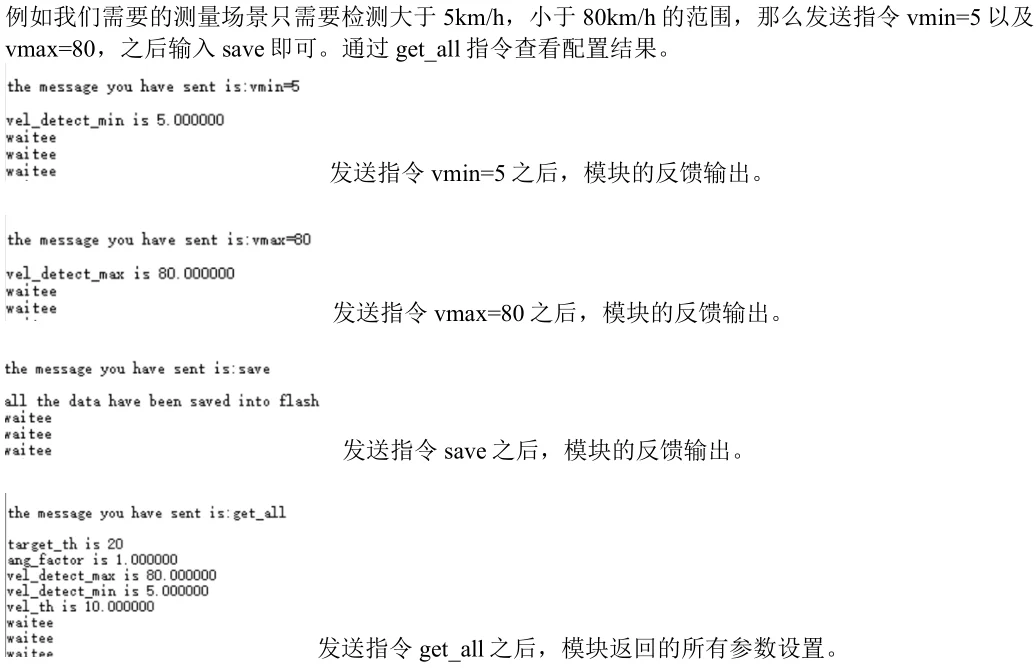
Vmin = xx
Xx-целое число, превышающее 0, что является минимальной определяемой скоростью
Vmax = xx
Xx-целое число, превышающее 0, что является максимальной определяемой скоростью
Vel_th = xx
Xx-целое число, превышающее 0, значением является верхний предел скорости разрыва, когда конечная скорость больше v_th, непосредственно определяется, что цель обнаружена и выведена
Скорость, когда Целевая скорость обнаружения ниже v_th, начните статистически оценивать цель, является ли цель допустимой.
Примечание: vmin <= v_th
Начальный
Инициализация всех параметров
Get_all
Получите все текущие параметры
Экономия
Сохраните все значения параметров, чтобы гарантировать, что при следующем включении параметров будут необходимые значения. Примечание: Если сохранить не используется, все параметры будут
Инициализировано до заданного значения.
Примеры примечаний к приложению
Компенсация угла
Порог чувствительности
Target _ th устанавливает чувствительность модуля. Чем больше значение, тем меньше чувствительность модуля и чем ближе расстояние обнаружения. Значение должно быть не менее 20.
Примечание по приложению:
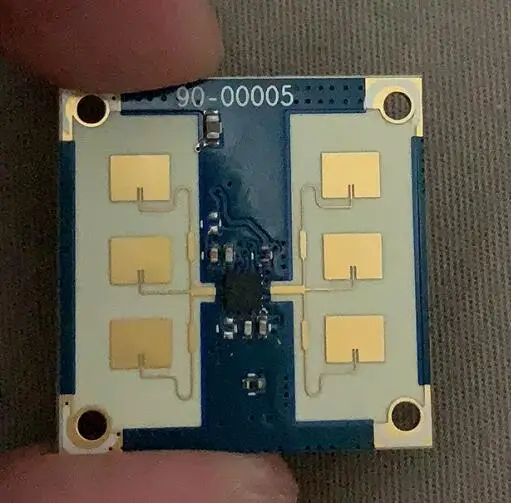
Этот Радарный модуль представляет собой антенну «один для одного», поэтому у него нет функции измерения угла. При использовании для измерения скорости, цель постоянно движется к радару или от радара, и угол между целью и радаром изменится соответственно. Поэтому рекомендуется как можно больше уменьшить угол измерения.
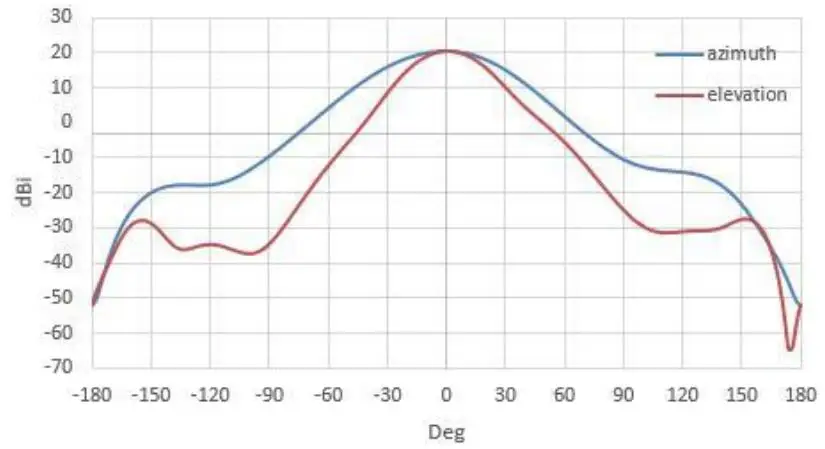
Размеры
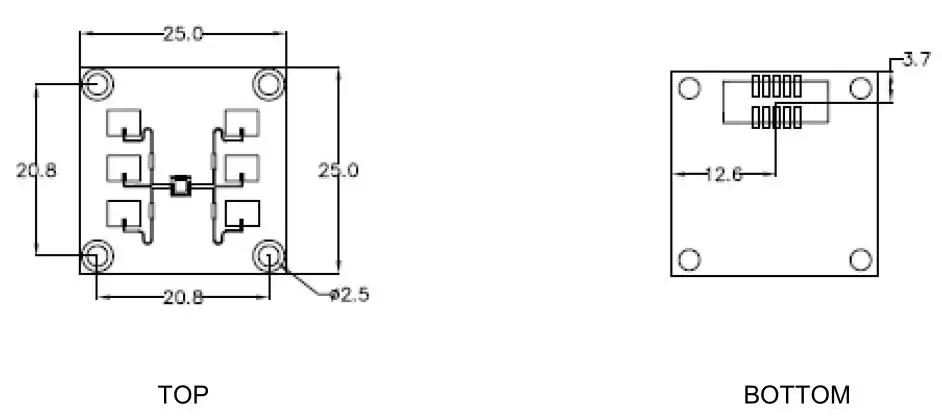
Шаблон антенны (TX & RX TOTAL)